




 本文讲述了作者在从树莓派的ssh服务迁移到Ubuntu18.04系统后遇到的问题,涉及IP扫描、相机启动(包括AstraCamera和ROS),以及在Ubuntu18.04上部署YOLOv5模型(处理CUDA兼容性问题和Python版本切换)的过程。
本文讲述了作者在从树莓派的ssh服务迁移到Ubuntu18.04系统后遇到的问题,涉及IP扫描、相机启动(包括AstraCamera和ROS),以及在Ubuntu18.04上部署YOLOv5模型(处理CUDA兼容性问题和Python版本切换)的过程。
有很多尚未解答的疑惑,如果大家对这里的知识比较熟悉,请多指教!
一、用ipscan扫描树莓派的IP
之前用树莓派系统(上面有ssh服务)可以扫描到,现在换了Ubuntu18.04系统,就扫描不到了。
解决方法:
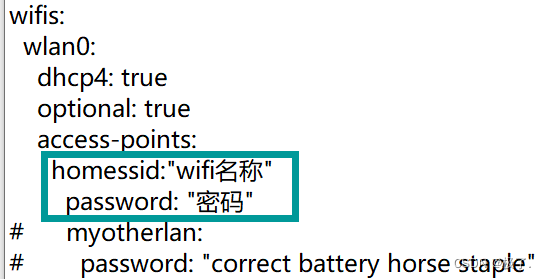
在烧录有Ubuntu18.04镜像的SD卡中,找到network-config并打开修改:
1.去掉wifis那一片的注释
2.增加wifi名称和密码
二、启动相机
我的情况就很符合这篇
中间我遇到问题的几步:
1.git clone https://github.com/orbbec/ros_astra_camera
可能因为网络问题而失败,多试几次可能就会成功
2.roslaunch astra_camera astra.launch
报错如下:
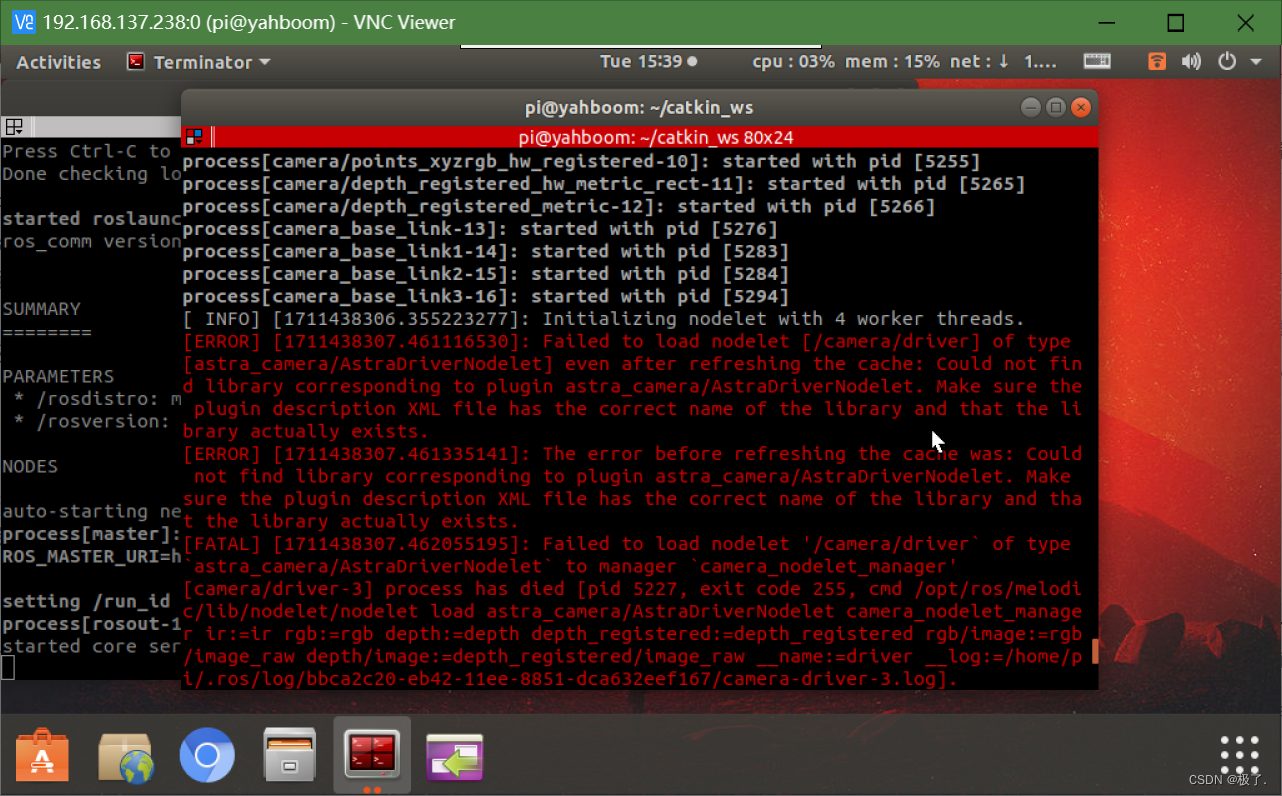
翻译:即使在刷新缓存后,也无法加载类型为[astra_camera/AstraDriverNodelet]的nodelet[/camera/driver]:找不到与插件astra_camera/AstraDriverNodelet对应的库。确保插件描述XML文件具有正确的库名称,并且该库确实存在。
解决:刷新工作空间。
source ~/catkin_ws/devel/setup.bash
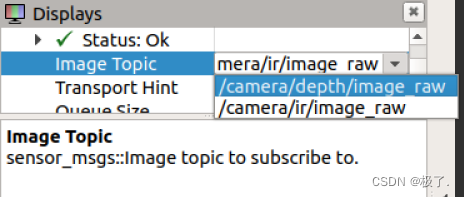
但是,在rviz的Image Topic里只有深度和IR图像,没有彩色图像。
三、部署yolov5
不太懂这类知识,去网上搜Ubuntu18.04上部署yolov5,出来的教程很多都要安装CUDA,按操作下来到这步:ubuntu-drivers devices
——无结果输出,网上解决方法很统一,统一地对我无用。
这条命令是用来检测可用驱动的,但是(问gpt):
树莓派通常不支持 Ubuntu 提供的 NVIDIA 驱动程序管理工具 ubuntu-drivers。这是因为树莓派通常使用 Broadcom 或者其他厂商的集成图形解决方案,而不是 NVIDIA 的 GPU。因此,ubuntu-drivers 命令在树莓派上可能不会提供有用的输出。
对于树莓派4B这样的 ARM 架构设备,由于其与常见的 x86 架构不同,无法直接使用 NVIDIA 的 CUDA 加速库。然而,YOLOv5 也提供了 PyTorch 版本,而 PyTorch 支持 CPU 上的推理运行,因此你可以在树莓派上运行 YOLOv5,只是推理速度可能会比在支持 CUDA 的 GPU 上慢一些。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 204
204





 到【灌水乐园】发言
到【灌水乐园】发言







