





这段代码实现了集合卡尔曼滤波(Ensemble Kalman Filter, EnKF)在Lorenz 63混沌系统中的状态估计仿真。通过将随机扰动的集合成员作为样本,EnKF在非线性动力系统中实现了对真实状态的逐步逼近。
代码介绍
系统模型
使用 Lorenz 63 混沌系统 作为状态演化模型,其连续形式为:
{ x ˙ = σ ( y − x ) y ˙ = x ( ρ − z ) − y z ˙ = x y − β z \begin{cases} \dot{x} = \sigma (y - x) \ \dot{y} = x(\rho - z) - y \ \dot{z} = xy - \beta z \end{cases} {x˙=σ(y−x) y˙=x(ρ−z)−y z˙=xy−βz
其中:
- σ \sigma σ、 ρ \rho ρ、 β \beta β为系统参数;
- 状态向量为 x = [ x , y , z ] T \mathbf{x} = [x, y, z]^T x=[x,y,z]T。
离散化后使用四阶 Runge-Kutta 积分方法,并叠加小的高斯噪声来模拟模型误差。
观测模型
观测算子定义为仅测量 (x) 与 (y) 分量:
z
k
=
H
x
k
+
v
k
,
\mathbf{z}_k = H \mathbf{x}_k + \mathbf{v}_k,
zk=Hxk+vk,
其中
H
=
[
1
0
0
0
1
0
]
H = \begin{bmatrix} 1 & 0 & 0 \ 0 & 1 & 0 \end{bmatrix}
H=[100 010],
观测噪声
v
k
∼
N
(
0
,
R
)
\mathbf{v}_k \sim \mathcal{N}(0, R)
vk∼N(0,R)。
EnKF滤波过程
-
初始化集合:
X 0 ( i ) ∼ N ( x 0 , P 0 ) , i = 1 , … , N X_0^{(i)} \sim \mathcal{N}(\mathbf{x}_0, P_0), \quad i=1,\ldots,N X0(i)∼N(x0,P0),i=1,…,N -
预测步骤(Forecast):
对每个集合成员应用系统模型:
X k ( i ) − = f ( X k − 1 ( i ) ) X_k^{(i)-} = f(X_{k-1}^{(i)}) Xk(i)−=f(Xk−1(i)) -
分析步骤(Analysis):
计算预测观测:
Y k ( i ) = h ( X k ( i ) − ) Y_k^{(i)} = h(X_k^{(i)-}) Yk(i)=h(Xk(i)−)
然后根据样本协方差估计卡尔曼增益:
K k = P x y ( P y y + R ) − 1 K_k = P_{xy} (P_{yy} + R)^{-1} Kk=Pxy(Pyy+R)−1
并更新每个集合成员:
X k ( i ) = X k ( i ) − + K k [ z k + ϵ ( i ) − Y k ( i ) ] X_k^{(i)} = X_k^{(i)-} + K_k [z_k + \epsilon^{(i)} - Y_k^{(i)}] Xk(i)=Xk(i)−+Kk[zk+ϵ(i)−Yk(i)]
其中 ϵ ( i ) ∼ N ( 0 , R ) \epsilon^{(i)} \sim \mathcal{N}(0, R) ϵ(i)∼N(0,R)为观测扰动。
代码结构说明
| 模块 | 功能 |
|---|---|
| EnsembleKalmanFilter 类 | 实现EnKF的核心结构,包括初始化、预测、分析、均值与协方差计算 |
| lorenz63_model() | Lorenz系统的状态演化函数(含Runge-Kutta积分) |
| observation_operator() | 定义观测关系,仅输出状态的前两维 |
| 主程序部分 | 完成数据生成、滤波执行与结果可视化 |
文件列表:
运行结果
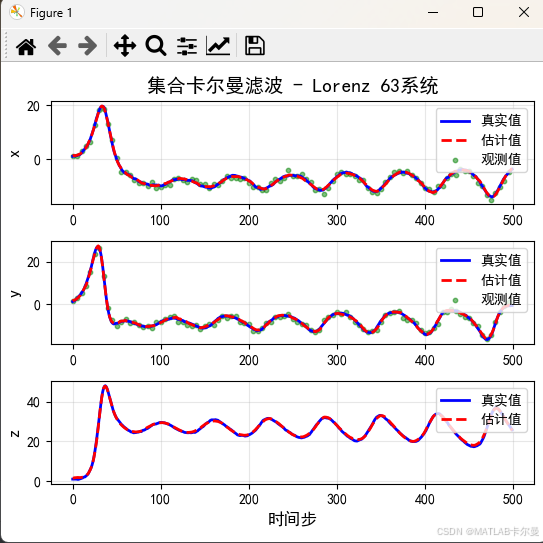
滤波前后状态曲线:
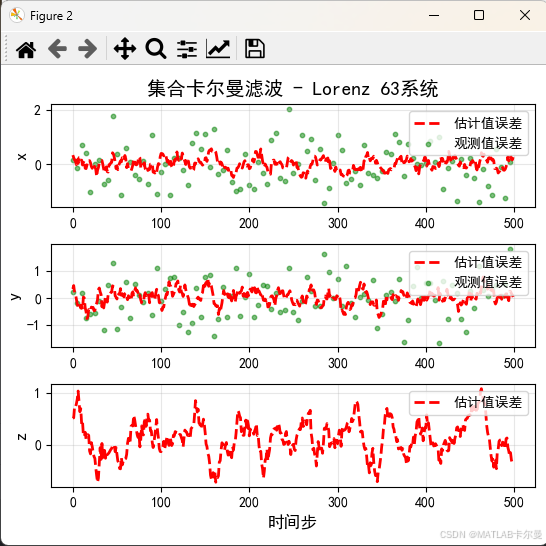
滤波前后误差曲线:
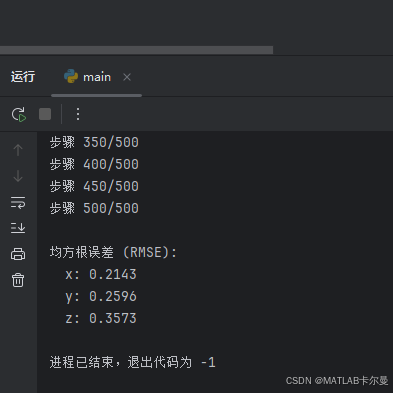
运行结果:
运行录屏:
【Python例程】集合卡尔曼滤波(EnKF)
代码获取
完整代码(工程)的下载链接:
https://download.youkuaiyun.com/download/callmeup/92292131
或:
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者



















 382
382

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











