




这是一段MATLAB代码,用于模拟GNSS(全球导航卫星系统)和UWB(超宽带)技术的融合定位系统。下面是对代码的分析和讲解:
程序介绍
参数设置
dt: 时间步长(单位:秒)total_time: 总时长(单位:秒)gnss_noise: GNSS定位噪声(单位:米)uwb_noise: UWB测距噪声(单位:米)gnss_anchor: GNSS基站坐标(二维)uwb_anchors: UWB基站坐标(二维)true_pos: 目标初始位置(二维)true_vel: 目标速度(二维)
模拟传感器观测
代码模拟GNSS和UWB传感器观测:
gnss_obs: GNSS观测位置序列(添加了噪声)uwb_dist: UWB测距序列(添加了噪声)
EKF初始化
代码初始化了扩展卡尔曼滤波器(EKF):
x: 状态向量(包含位置和速度)P: 状态协方差矩阵Q: 过程噪声矩阵pos_ekf: 存储滤波结果的位置序列
主循环
主循环执行以下步骤:
- 预测步骤:使用状态转移矩阵预测状态向量和协方差矩阵。
- GNSS更新:使用GNSS观测更新状态向量和协方差矩阵。
- UWB更新:使用UWB测距更新状态向量和协方差矩阵(对于每个基站)。
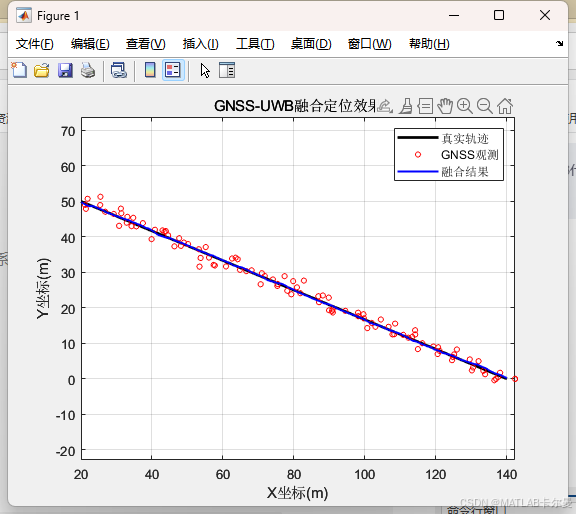
可视化
代码最后可视化了真实轨迹、GNSS观测和融合结果:
- 使用
plot函数绘制了真实轨迹、GNSS观测和融合结果。 - 使用
legend函数显示了图例。
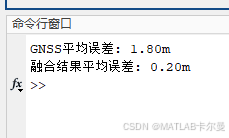
误差分析
代码最后计算了GNSS和融合结果的平均误差:
- 使用
vecnorm函数计算了位置误差。 - 使用
fprintf函数输出了平均误差。
总的来说,这段代码模拟了GNSS和UWB技术的融合定位系统,并使用扩展卡尔曼滤波器估计了目标位置和速度。结果显示了真实轨迹、GNSS观测和融合结果,并计算了平均误差。
运行结果
matlab代码
部分代码如下:
%% GNSS-UWB融合定位仿真系统,紧耦合
clc; clear; close all;
%% 参数设置
dt = 1; % 时间步长(s)
total_time = 100; % 总时长(秒)
gnss_noise = 1.5;% GNSS定位噪声(m)
uwb_noise = 0.3; % UWB测距噪声(m)
% 基站坐标(二维)
gnss_anchor = [0, 0]; % GNSS基站(参考点)
uwb_anchors = [100,0; 0,100; 100,100]; % UWB基站坐标
% 目标运动参数(匀速模型)
true_pos = [20, 50]; % 初始位置
true_vel = [1.2, -0.5]; % 速度(m/s)
%% 生成真实轨迹
time = 0:dt:total_time;
pos_true = zeros(length(time),2);
for t = 1:length(time)
pos_true(t,:) = true_pos + true_vel*time(t);
end
%% 模拟传感器观测
% GNSS观测(直接位置测量)
完整代码:https://download.youkuaiyun.com/download/callmeup/90541601
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











