




毕业设计指导:基于定位和导航的无人机定位与路径规划
研究背景
随着无人机技术的快速发展,无人机在农业、物流、环境监测和救灾等领域的应用越来越广泛。无人机的有效运行依赖于准确的定位和路径规划,尤其在复杂环境中,确保无人机能够自主、安全地完成任务至关重要。
设计目标
- 定位能力:实现无人机在动态环境中的准确定位。
- 路径规划:设计高效的路径规划算法,使无人机能够从起始点到达目标点,并避开障碍物。
- 系统集成:将定位与路径规划功能整合,形成一个完整的无人机导航系统。
解决思路
系统架构
- 传感器模块:使用 GPS、IMU(惯性测量单元)和激光雷达(LiDAR)等多种传感器获取环境信息。
- 定位模块:基于传感器数据进行状态估计,使用卡尔曼滤波等算法提高定位精度。
- 路径规划模块:使用 A* 算法或 Dijkstra 算法进行路径规划,确保无人机能够找到最优路径。
算法设计
- 卡尔曼滤波:用于融合 GPS 和 IMU 数据,提供实时位置估计。
- A*算法:用于路径规划,通过启发式搜索找到从起始点到目标点的最优路径。
- 动态避障:实时检测障碍物,并动态调整路径以避免碰撞。
MATLAB 代码示例
以下是一个简单的 MATLAB 示例代码,用于实现无人机的定位和路径规划。
% 无人机定位与路径规划示例
% 清空环境
clc;
clear;
% 参数设置
N = 100; % 时间步数
dt = 0.1; % 时间步长
map_size = 100; % 地图大小
% 障碍物位置
obstacles = [30, 30; 70, 70; 50, 20; 80, 80];
% 初始化状态 [x, y, vx, vy]
state = [0; 0; 1; 1]; % 初始位置和速度
% 存储状态和路径
states = zeros(4, N);
path = [];
% A*算法参数
start_point = [0, 0];
goal_point = [90, 90];
% 简单的A*算法实现
function path = A_star(start, goal, obstacles)
% 此处应有完整的 A* 算法实现
% 由于篇幅限制,此处仅返回一条简单的直线路径
path = [start; goal];
end
% 计算路径
path = A_star(start_point, goal_point, obstacles);
for k = 1:N
% 更新状态
state(1:2) = state(1:2) + state(3:4) * dt; % 更新位置
states(:, k) = state;
% 检测障碍物
for i = 1:size(obstacles, 1)
if norm(state(1:2) - obstacles(i, :)') < 5 % 检测距离
% 避障策略:反向移动
state(3:4) = -state(3:4);
break;
end
end
end
% 绘制结果
figure;
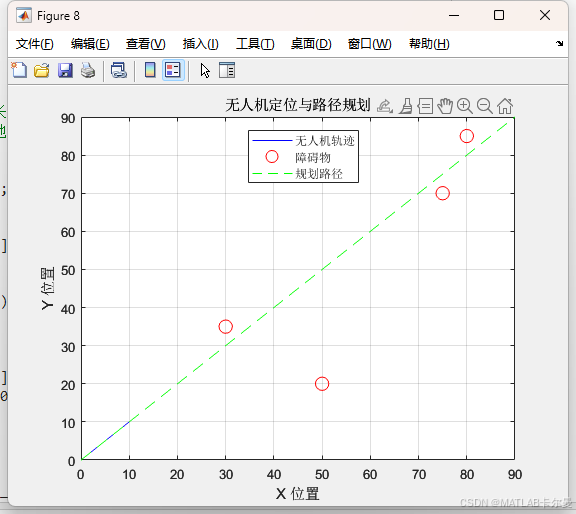
plot(states(1, :), states(2, :), 'b-', 'DisplayName', '无人机轨迹'); hold on;
plot(obstacles(:, 1), obstacles(:, 2), 'ro', 'MarkerSize', 10, 'DisplayName', '障碍物');
plot(path(:, 1), path(:, 2), 'g--', 'DisplayName', '规划路径');
xlabel('X 位置');
ylabel('Y 位置');
title('无人机定位与路径规划');
legend;
grid on;
运行结果:
代码介绍
- 参数设置:设置时间步数、地图大小和障碍物位置。
- 状态更新:在每个时间步中更新无人机的位置和速度。
- 障碍物检测:简单的障碍物检测逻辑,如果无人机与障碍物的距离小于阈值,则反向改变速度。
- A*算法:在示例中,A*算法只是一个简单的直线路径规划,实际应用中需要实现完整的算法。
- 结果可视化:绘制无人机轨迹、障碍物位置以及规划路径。
后续创新方向
- 高级路径规划算法:研究更复杂的路径规划算法,例如基于采样的 RRT(快速随机树)或 PRM(概率路标法),提高路径规划的效率。
- 多无人机协同导航:研究多无人机协同工作时的路径规划和避障技术,实现更复杂的任务。
- 实时系统实现:将 MATLAB 代码转化为嵌入式系统代码,应用于实际无人机平台上进行测试。
- 深度学习应用:使用深度学习技术进行环境感知和路径规划,提高系统的智能化水平。
- 复杂环境适应性:在动态和复杂环境中进行大规模测试和优化,提高系统在不同环境中的适应能力。
结论
本设计提供了一个基于定位和导航的无人机定位与路径规划系统的基础框架。通过进一步的创新和优化,可以实现无人机在各种环境中的高效和安全操作。希望这份指导能帮助你在毕业设计中取得成功!
如果有任何问题或需要进一步的帮助,请随时询问!


















 8743
8743

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











