




该代码实现了基于 RSSI(接收信号强度指示)的无线传感器网络(WSN)定位算法,模拟三维移动节点的定位过程。通过选择多个锚点并进行多次定位估计,最终计算出目标位置的平均值。
定位结果
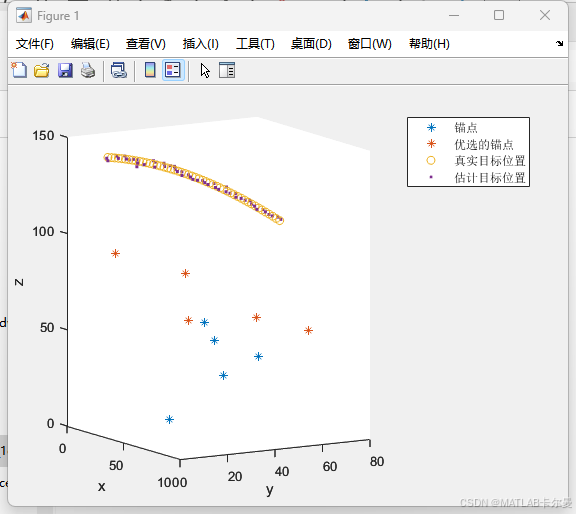
轨迹图:
误差曲线:

整体定位误差和最后一个点的坐标输出:

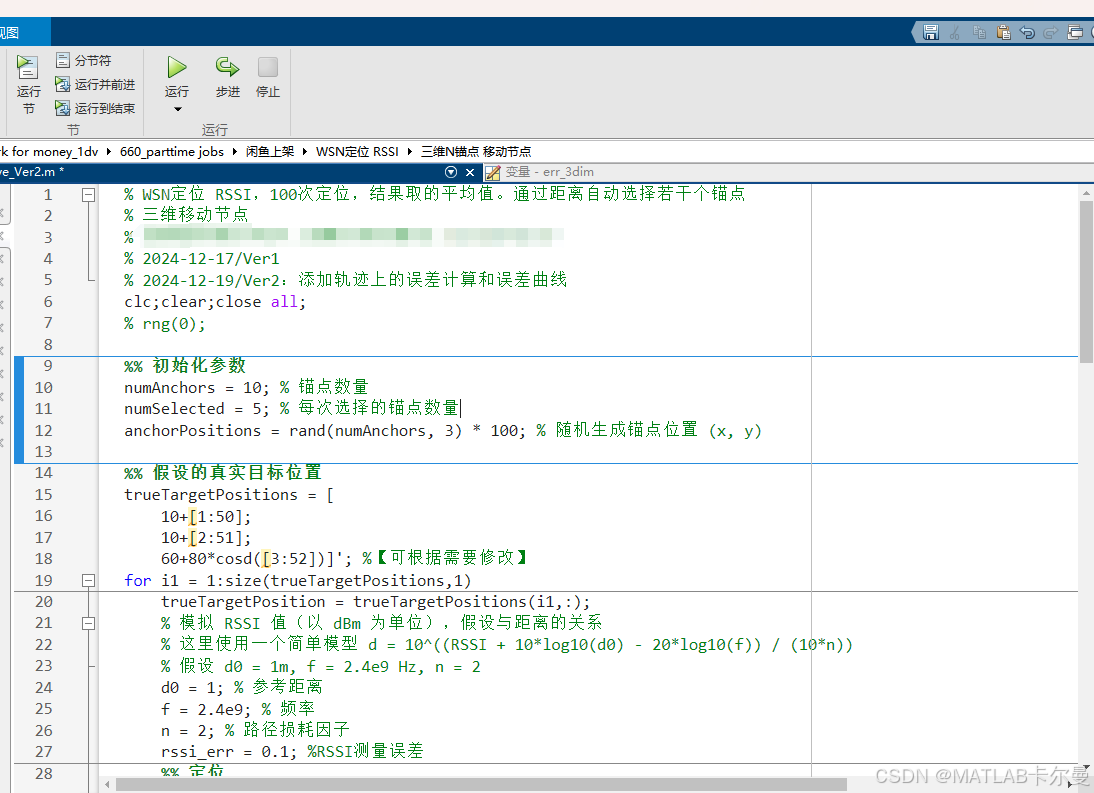
程序运行界面:
代码讲解
代码概述
该代码实现了基于 RSSI(接收信号强度指示)的无线传感器网络(WSN)定位算法,模拟三维移动节点的定位过程。通过选择多个锚点并进行多次定位估计,最终计算出目标位置的平均值。
具体步骤
-
初始化环境:
clc; clear; close all;清除命令行、变量和关闭所有图形窗口。
-
设置参数:
numAnchors = 10; % 锚点数量 numSelected = 5; % 每次选择的锚点数量 anchorPositions = rand(numAnchors, 3) * 100; % 随机生成锚点位置 (x, y)- 定义锚点的数量和每次选择的锚点数量。
- 随机生成锚点在三维空间中的位置,范围为 0 到 100。
-
真实目标位置:
trueTargetPositions = [ 10+[1:50]; 10+[2:51]; 60+80*cosd([3:52])]'; % 真实目标位置设定多个真实目标的位置,生成一个包含 50 个点的目标位置数组。
-
定位过程:
使用一个循环遍历每个真实目标位置:for i1 = 1:size(trueTargetPositions,1) trueTargetPosition = trueTargetPositions(i1,:); ...- 在每次迭代中,计算与目标位置的距离并生成模拟的 RSSI 值。
-
RSSI 计算模型:
rssi = -20 * log10(selectedDistances/d0) - 10 * log10(f) + 20 * log10(4 * pi / 3e8) + rssi_err*randn(numSelected,1);根据选定锚点与目标的距离计算对应的 RSSI 值。公式基于路径损耗模型,加入了测量误差。
-
目标位置估计:
d = 10 .^ ((-rssi - 10 * log10(f) + 20 * log10(4 * pi / 3e8))/20) * d0; [estimatedPosition] = position_3dim(d,selectedAnchors);- 从 RSSI 值反推出距离,并调用自定义函数
position_3dim进行三维位置估计。
- 从 RSSI 值反推出距离,并调用自定义函数
-
计算平均估计位置:
在每次迭代后,计算 100 次定位估计的平均值:averageEstimatedPosition = mean(estimatedPositions, 1); -
结果输出:
使用fprintf输出最后一个点的真实位置和估计位置:fprintf('真实目标位置: (%.2f, %.2f, %.2f)\n', trueTargetPosition(1), trueTargetPosition(2), trueTargetPosition(3)); fprintf('估计目标位置: (%.2f, %.2f, %.2f)\n', averageEstimatedPosition(1), averageEstimatedPosition(2), averageEstimatedPosition(3)); -
绘图:
figure; hold on plot3(anchorPositions(:,1),anchorPositions(:,2),anchorPositions(:,3),'*','DisplayName','锚点'); plot3(trueTargetPositions(:,1), trueTargetPositions(:,2), trueTargetPositions(:,3),'o','DisplayName','真实目标位置'); plot3(averageEstimatedPositions(:,1), averageEstimatedPositions(:,2), averageEstimatedPositions(:,3),'.','DisplayName','估计目标位置');通过三维散点图展示锚点、真实目标位置和估计目标位置。
定位函数 position_3dim
该函数实现了基于距离的三维位置估计。使用最小二乘法来计算目标位置:
function [p_out] = position_3dim(R_calcu, baseP)
...
X = (pinv(H)*a); % 伪逆求法
p_out = X';
end
- 该函数接收计算出的距离和选定的基准锚点位置,构建线性方程并解出目标位置。
总结
这段代码通过模拟 RSSI 测量,结合随机选择的锚点进行多次定位,最终计算出目标位置的平均值。整个过程展示了无线传感器网络中定位算法的实现,涉及信号处理、随机选择、位置估计等多个方面的内容。
如有代码定制、答疑等需求,欢迎交流



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











