【PSINS工具箱】EKF与UKF滤波




于 2024-03-31 22:09:43 首次发布

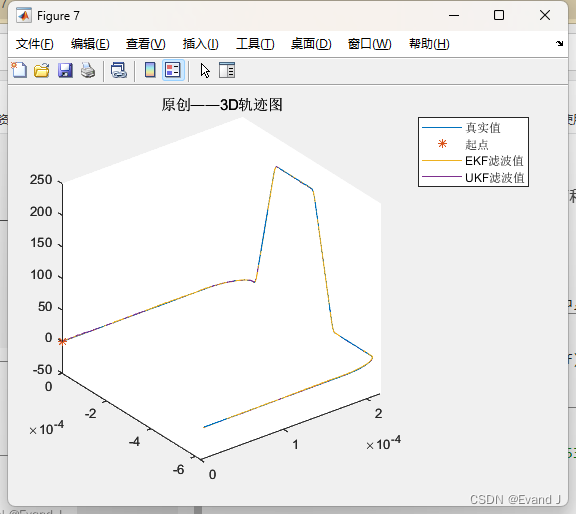
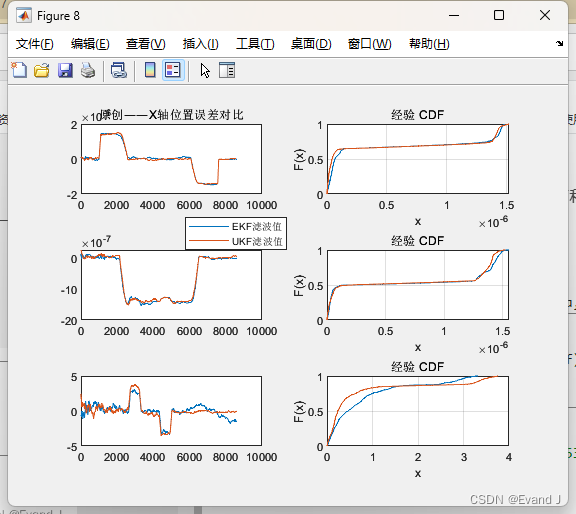
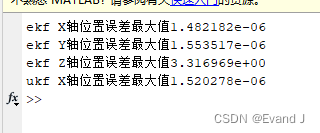
 本文介绍了如何使用PSINS工具箱进行EKF(扩展卡尔曼滤波)和UKF(无迹卡尔曼滤波)的实践操作。通过修改SINS/GPS的153例程,作者将两种滤波方法整合到同一文件中,一次运行即可对比两个滤波器的输出,并提供图形化结果和误差量化分析。
本文介绍了如何使用PSINS工具箱进行EKF(扩展卡尔曼滤波)和UKF(无迹卡尔曼滤波)的实践操作。通过修改SINS/GPS的153例程,作者将两种滤波方法整合到同一文件中,一次运行即可对比两个滤波器的输出,并提供图形化结果和误差量化分析。
本文介绍了如何使用PSINS工具箱进行EKF(扩展卡尔曼滤波)和UKF(无迹卡尔曼滤波)的实践操作。通过修改SINS/GPS的153例程,作者将两种滤波方法整合到同一文件中,一次运行即可对比两个滤波器的输出,并提供图形化结果和误差量化分析。
本文介绍了如何使用PSINS工具箱进行EKF(扩展卡尔曼滤波)和UKF(无迹卡尔曼滤波)的实践操作。通过修改SINS/GPS的153例程,作者将两种滤波方法整合到同一文件中,一次运行即可对比两个滤波器的输出,并提供图形化结果和误差量化分析。
 2997
7709
2997
7709

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文

























