



一、话题通信
1.1.创建工作空间
mkdir -p ~/catkin_ws/src#创建文件夹
cd ~/catkin_ws/src#进入目录
catkin_init_workspace#初始化,使其成为ROS的工作空间
1.2.编译
cd ..
catkin_make
1.3.配置及检查环境
source /home/haha/catkin_ws/devel/setup.bash#
sudo nano ~/.bashrc
echo $ROS_PACKAGE_PATH
1.4.功能包的创建
cd ~/catkin_ws/src
catkin_create_pkg learning_communication std_msgs rospy roscpp
#catkin_create_pkg 功能包名字 依赖
#std_msgs:定义的标准的数据结构
#rospy:提供python编程接口
#roscpp:提供c++编程接口
1.5.编译空间
catkin_make
1.6.打开新终端
rosrun hello printf_hello
1.7.结果
hello ros!
二、服务通信
新建功能包hello2,在其src目录下创建server节点和client节点
实现两个整数相加并输出和
代码如下:
服务端:
#include "ros/ros.h"
#include "learning_communication/AddTwoInts.h"
// service回调函数,输入参数req,输出参数res
bool add(learning_communication::AddTwoInts::Request &req,
learning_communication::AddTwoInts::Response &res)
{
// 将输入参数中的请求数据相加,结果放到应答变量中
res.sum = req.a + req.b;
ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b);
ROS_INFO("sending back response: [%ld]", (long int)res.sum);
return true;
}
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "add_two_ints_server");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个名为add_two_ints的server,注册回调函数add()
ros::ServiceServer service = n.advertiseService("add_two_ints", add);
// 循环等待回调函数
ROS_INFO("Ready to add two ints.");
ros::spin();
return 0;
}
客户端
#include <cstdlib>
#include "ros/ros.h"
#include "learning_communication/AddTwoInts.h"
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "add_two_ints_client");
// 从终端命令行获取两个加数
if (argc != 3)
{
ROS_INFO("usage: add_two_ints_client X Y");
return 1;
}
// 创建节点句柄
ros::NodeHandle n;
// 创建一个client,请求add_two_int service,service消息类型是learning_communication::AddTwoInts
ros::ServiceClient client = n.serviceClient<learning_communication::AddTwoInts>("add_two_ints");
// 创建learning_communication::AddTwoInts类型的service消息
learning_communication::AddTwoInts srv;
srv.request.a = atoll(argv[1]);
srv.request.b = atoll(argv[2]);
// 发布service请求,等待加法运算的应答结果
if (client.call(srv))
{
ROS_INFO("Sum: %ld", (long int)srv.response.sum);
}
else
{
ROS_ERROR("Failed to call service add_two_ints");
return 1;
}
return 0;
}
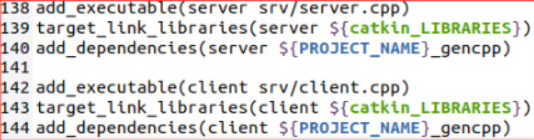
2.1编译节点
add_executable(add_two_ints_server src/add_two_ints_server.cpp)
target_link_libraries(add_two_ints_server ${catkin_LIBRARIES})
add_dependencies(add_two_ints_server learning_communication_gencpp)
add_executable(add_two_ints_client src/add_two_ints_client.cpp)
target_link_libraries(add_two_ints_client ${catkin_LIBRARIES})
add_dependencies(add_two_ints_client learning_communication_gencpp)
2.3.编译
catkin_make
2.4.运行
rosrun learning_communication add_two_ints_client 53 66
三、 Rviz 显示电脑摄像头
安装
终端命令
sudo apt-get install ros-melodic-rviz
rosdep install rviz
``
```c
rosmake rviz
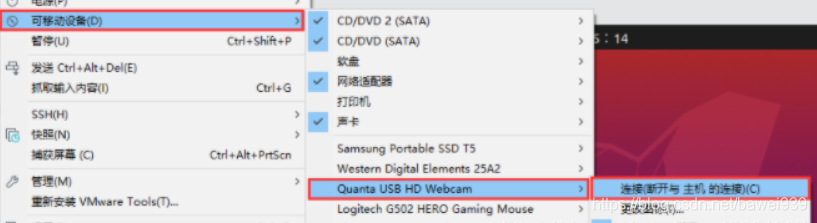
1.在进入 Ubuntu 之前先打开虚拟机设置,将 USB 控制器设置如下,usb控制器调为启用状态
2.在虚拟机设置里链接可移动设备

















 805
805





 到【灌水乐园】发言
到【灌水乐园】发言







