







 本文介绍了基于Unity的汽车自我导航项目,该项目利用前馈神经网络和遗传算法让汽车学习在赛道上行驶。汽车通过五个传感器获取障碍物距离,神经网络经过遗传算法训练,不断迭代优化权重。在Unity中,通过评估、选择、重组和变异过程形成新汽车群体,实现自我导航。项目提供了一个了解可视化进化学习、神经网络与遗传算法结合的流程,适合学习和借鉴。
本文介绍了基于Unity的汽车自我导航项目,该项目利用前馈神经网络和遗传算法让汽车学习在赛道上行驶。汽车通过五个传感器获取障碍物距离,神经网络经过遗传算法训练,不断迭代优化权重。在Unity中,通过评估、选择、重组和变异过程形成新汽车群体,实现自我导航。项目提供了一个了解可视化进化学习、神经网络与遗传算法结合的流程,适合学习和借鉴。
1、项目简述
这个项目是别人的好些年前的基于前馈神经网络以及遗传算法进行迭代学习的一个项目。汽车必须在不接触赛道墙壁或任何其他障碍物的情况下穿过赛道。汽车有五个前置传感器,用于测量给定方向上与障碍物的距离。这些传感器的读数作为汽车神经网络的输入。
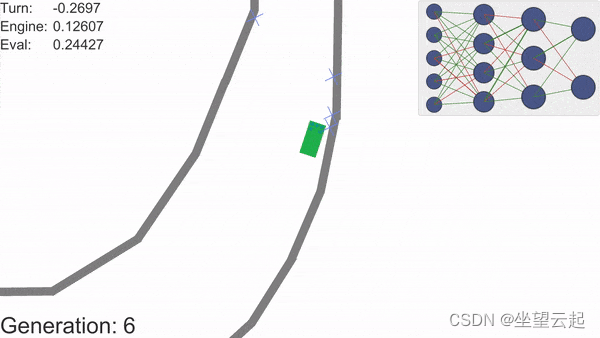
使用的神经网络是标准的、全连接的前馈神经网络。它包括 4 层:一个具有 5 个神经元的输入层,两个分别具有 4 个和 3 个神经元的隐藏层以及一个具有 2 个神经元的输出层。
神经网络的代码位置:UnityProject/Assets/Scripts/AI/NeuralNetworks/
神经网络的权重使用称为遗传算法的进化算法进行训练。 起初有 N 辆随机初始化的汽车产生。然后选择最好的汽车进行重新组合,创造出新的“后代”汽车。然后,这些后代汽车形成了新的 N 汽车群体,并且还进行了轻微突变,以便为群体注入更多的多样性。然后,新创建的汽车群体尝试再次行驶,评估、选择、重组和变异的过程再次开始。从评估一个群体到评估下一个群体的一个完整周期称为一代。
&n

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1464
1464

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











