







 本文探讨了计算机视觉中的测距技术,包括主动测距的飞行时间、结构光和激光三角测量,以及被动测距的立体视觉、光度立体和阴影形状。主动技术通常更快、更准确,但易受环境因素影响;被动技术成本更低,不受环境影响,但可能精度较低。选择测距技术需根据应用需求和环境条件。
本文探讨了计算机视觉中的测距技术,包括主动测距的飞行时间、结构光和激光三角测量,以及被动测距的立体视觉、光度立体和阴影形状。主动技术通常更快、更准确,但易受环境因素影响;被动技术成本更低,不受环境影响,但可能精度较低。选择测距技术需根据应用需求和环境条件。
一、计算机视觉中的测距任务
测距是计算机视觉中的一项关键任务,涉及测量物体和相机之间的距离。这些信息可用于多种应用,包括机器人、自动驾驶汽车和增强现实。测距技术有很多种,包括主动式和被动式,每种技术都有自己的优点和局限性。主动测距技术,例如飞行时间、结构光和激光三角测量,涉及将图案投影到物体上并测量图案返回相机所需的时间。被动测距技术,例如立体视觉、光度立体和阴影形状,依赖于使用从不同视点拍摄的多个图像来计算深度。
主动测距技术包括将图案投影到物体上,并测量图案返回相机所需的时间。
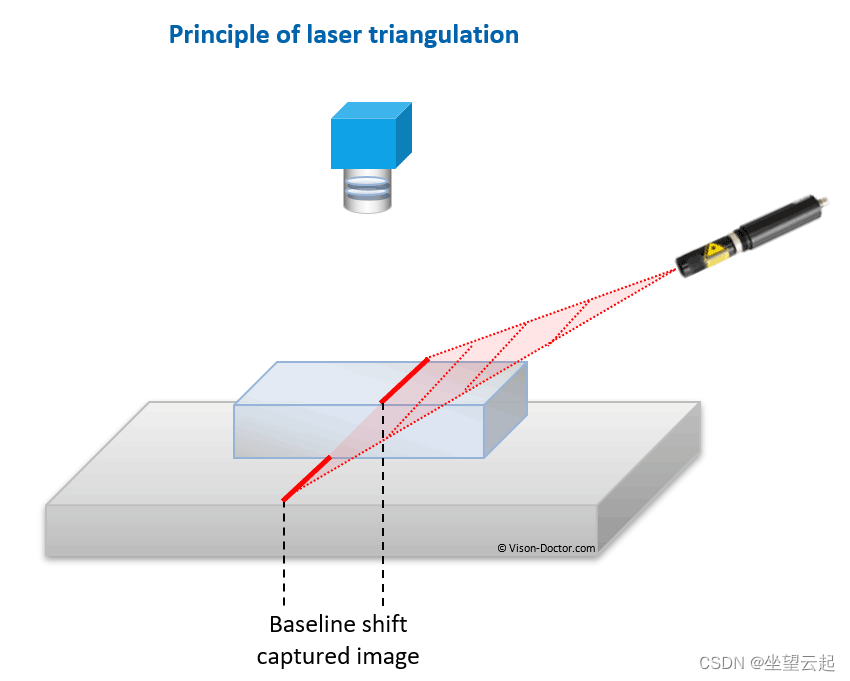
一种流行的主动测距技术是飞行时间(ToF),它包括发射光脉冲并测量脉冲返回相机所需的时间。结构光(Structured light)是另一种活跃的技术,包括将一系列图案投影到对象上,并使用图案的变形来推断深度。激光三角测量(Laser triangulation)是另一种活跃的技术,包括将激光线投影到物体上,并测量反射线与相机平面相交的角度。
另一方面,被动

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











