







-
环境搭建:
- 安装YOLOv5所需的开发环境,包括Python、PyTorch等依赖库。
- 下载并配置YOLOv5模型,准备用于目标检测任务。 -
相机标定:
- 对双目相机进行标定以获取相机的内外参数,包括焦距、主点坐标、镜头畸变系数等。
- 使用OpenCV的calibrateCamera函数进行标定过程,生成相机矩阵和畸变系数。 -
图像校正:
- 利用获得的相机参数对原始图像进行畸变校正,消除镜头畸变的影响。 -
双目匹配:
- 对校正后的左右图像进行特征匹配,寻找视差图,通过视差计算得到深度信息。 -
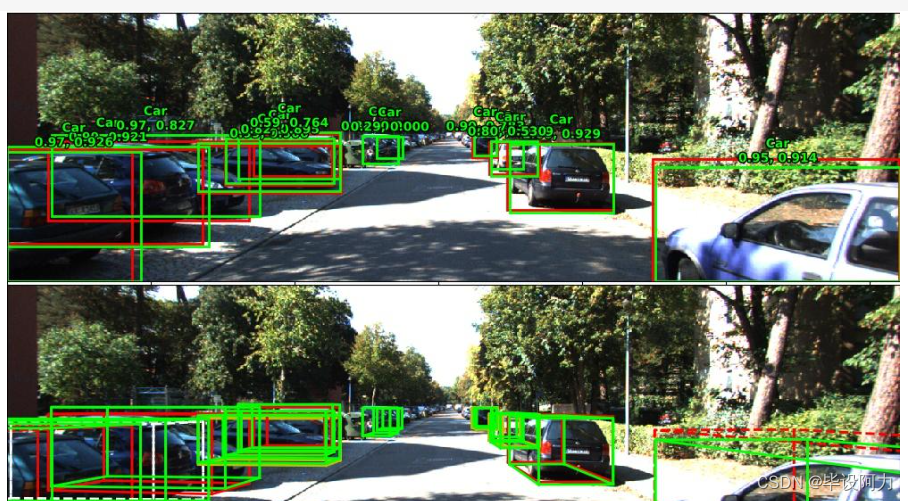
目标检测:
- 使用预训练的YOLOv5模型对校正后的单目图像进行目标检测,识别并定位出图像中的感兴趣目标。 -
深度估计与测距:
- 将YOLOv5检测到的目标框与双目匹配得到的深度信息关联起来,根据相机参数和视差关系计算出目标的具体距离。 -
计数与三维坐标重构:
- 根据目标的深度信息,不仅可以计算出目标距离,还可以通过三角测量原理重建目标在三维空间中的坐标位置,进而实现对多个目标的计数和位置追踪。
总之,Yolov5双目测距教程旨在指导用户如何整合上述各步骤,构建一套完整的双目视觉系统,实现高精度的目标检测、计数和距离测量功能。整个过程涉及计算机视觉领域的关键技术,包括相机标定、图像处理、深度估计和目标检测算法的应用。
Yolov5双目测距-双目相机计数及测距教程(含代码)_yolov5测距-优快云博客
3D目标检测
是计算机视觉和机器学习领域的一个重要课题,它的目的是从三维空间的数据中自动识别和定位各种物体,并给出它们的三维边界框。这种技术对于诸如自动驾驶汽车、无人机导航、机器人操作、虚拟现实和增强现实等应用场景至关重要,因为它能够提供更准确的物理空间信息,帮助系统理解周围环境并做出决策。
3D目标检测通常依赖于不同的传感器数据源,包括但不限于
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 688
688

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









