




问优快云
以下是一个简单的光追里射线和三角形求交的代码,使用了C++语言和OpenGL库。
首先,我们需要定义一个射线类(Ray),包含起点(origin)和方向向量(direction):
复制class Ray {
public:
vec3 origin;
vec3 direction;
Ray(vec3 o, vec3 d) {
origin = o;
direction = d;
}
};
接下来,我们定义一个三角形类(Triangle),包含三个点(p1, p2, p3),以及计算法向量(normal)的方法:
复制class Triangle {
public:
vec3 p1, p2, p3;
vec3 normal;
Triangle(vec3 v1, vec3 v2, vec3 v3) {
p1 = v1;
p2 = v2;
p3 = v3;
normal = normalize(cross(p2 - p1, p3 - p1));
}
bool intersect(Ray ray, float& t) {
vec3 e1 = p2 - p1;
vec3 e2 = p3 - p1;
vec3 h = cross(ray.direction, e2);
float a = dot(e1, h);
if (a > -EPSILON && a < EPSILON) {
return false;
}
float f = 1.0 / a;
vec3 s = ray.origin - p1;
float u = f * dot(s, h);
if (u < 0.0 || u > 1.0) {
return false;
}
vec3 q = cross(s, e1);
float v = f * dot(ray.direction, q);
if (v < 0.0 || u + v > 1.0) {
return false;
}
t = f * dot(e2, q);
if (t > EPSILON) {
return true;
}
return false;
}
};
在上面的代码中,我们使用了Möller–Trumbore算法来判断射线和三角形是否相交。如果相交,则返回交点到射线起点的距离t。
最后,我们可以使用以下代码来进行光追,求出光线和三角形的交点:
复制float intersect(Ray ray, Triangle triangle) {
float t;
if (triangle.intersect(ray, t)) {
return t;
}
return INFINITY;
}
vec3 trace(Ray ray) {
float tmin = INFINITY;
Triangle* hitTriangle = nullptr;
for (auto triangle : triangles) {
float t = intersect(ray, triangle);
if (t < tmin) {
tmin = t;
hitTriangle = ▵
}
}
if (hitTriangle == nullptr) {
return vec3(0, 0, 0);
}
vec3 hitPoint = ray.origin + tmin * ray.direction;
vec3 normal = hitTriangle->normal;
return normal;
}
在上面的代码中,我们首先循环遍历所有的三角形,找到距离射线起点最近的交点,并记录下该三角形。如果没有找到交点,则返回黑色(vec3(0, 0, 0)),表示没有照到任何物体。
然后,我们计算交点的法向量,并将其作为颜色返回。在这个简单的光追场景中,我们只考虑了漫反射,因此直接使用法向量作为颜色。在实际的光追中,我们需要考虑多种反射和折射的情况,需要使用更加复杂的光学模型来计算颜色。
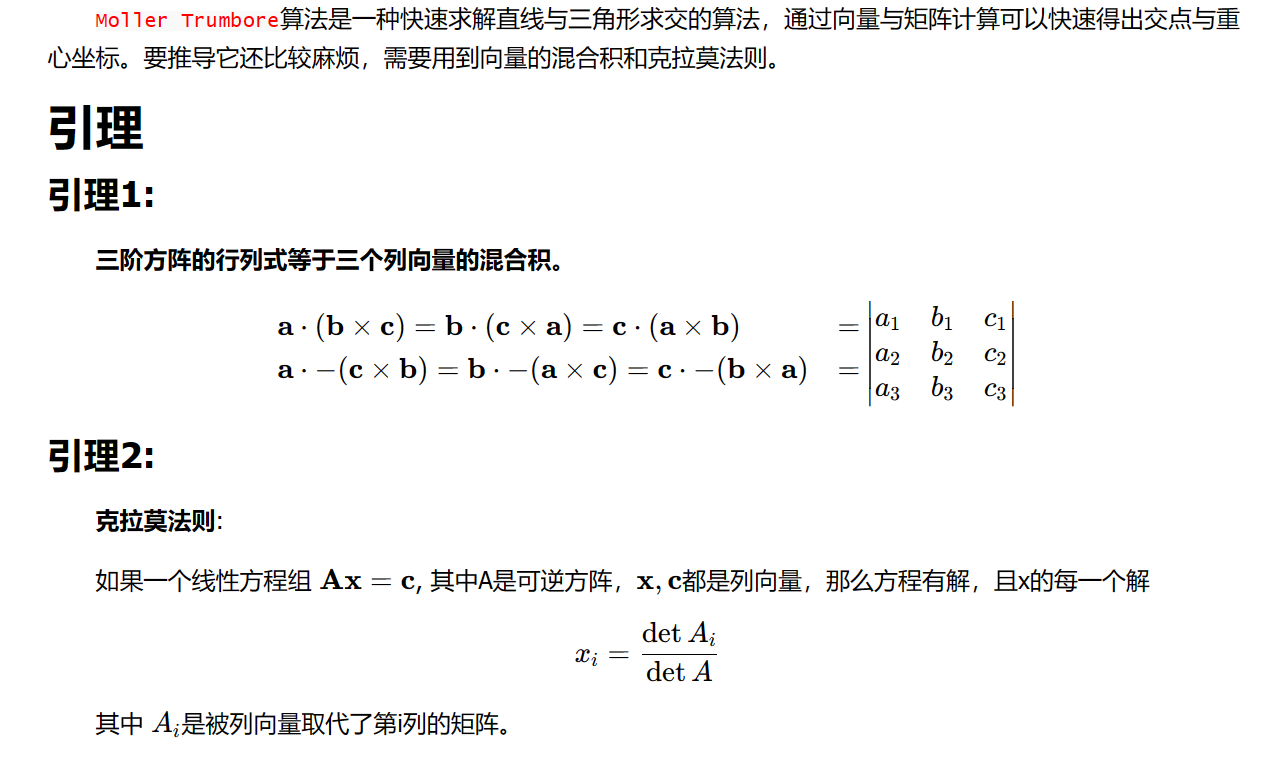
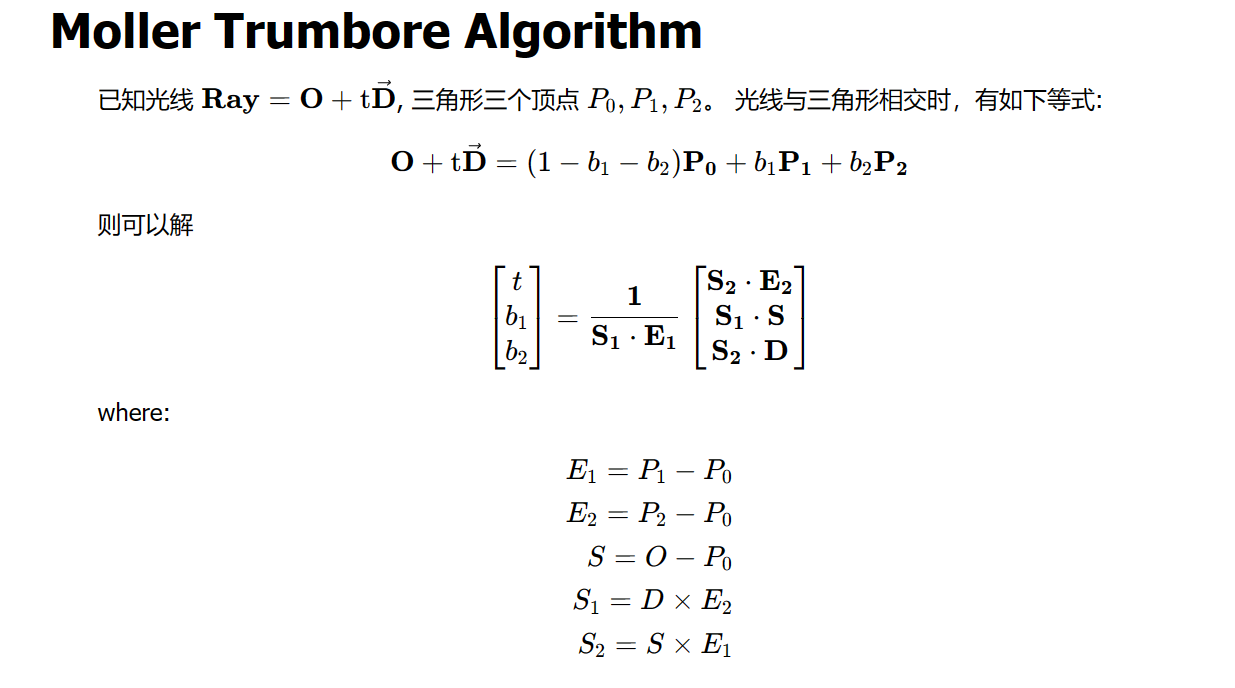
Moller Trumbore算法
直线与三角形相交Moller Trumbore算法推导 | Blurred code
混合积,把行列式计算结果和平行六面体体积结合起来,就好理解了。
 结果
结果
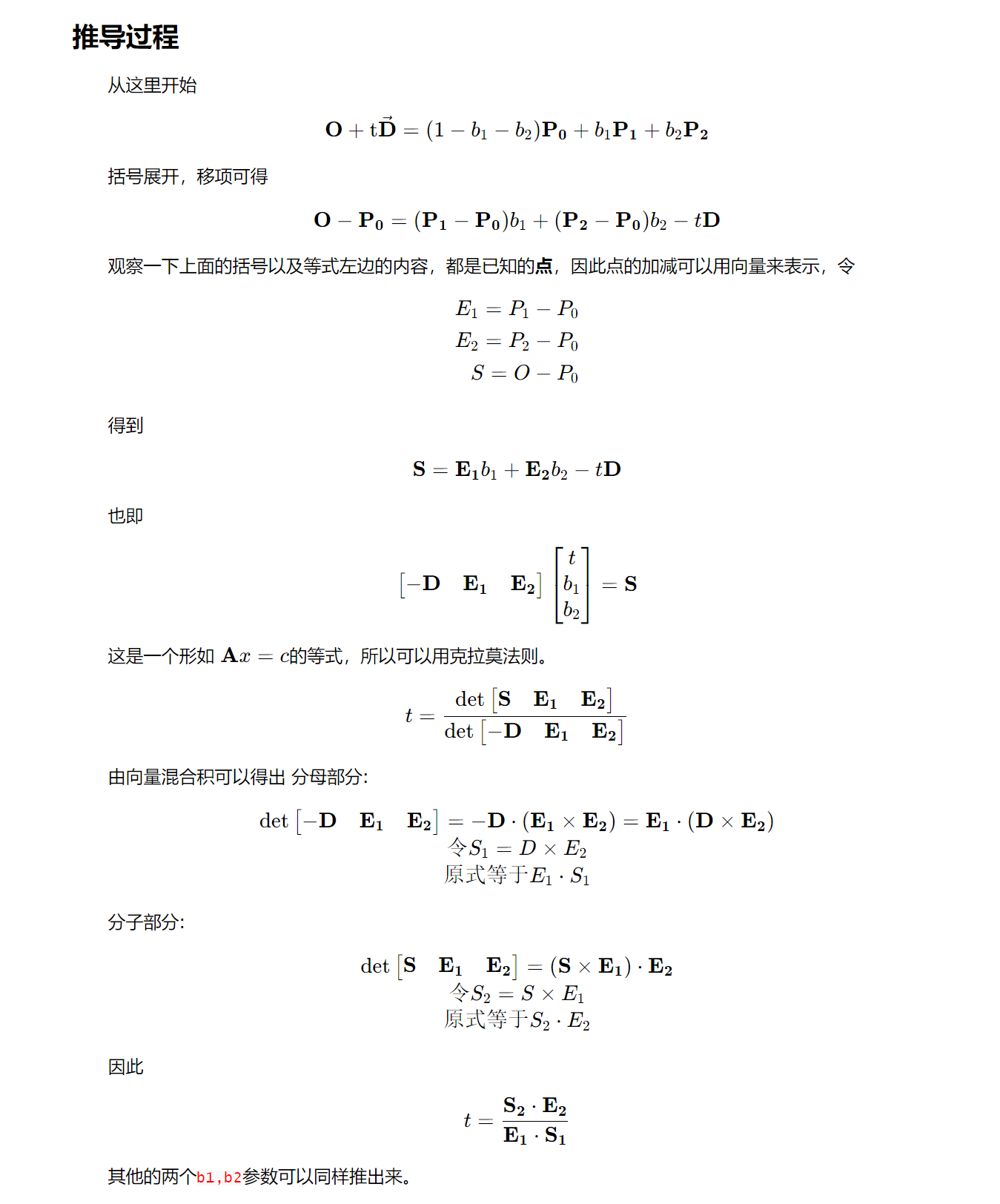
推导过程
一个中文的
一文读懂射线与三角形相交算法Moller-Trumbore算法【收藏好文】 - OAK中国的文章 - 知乎
里面提到了3个条件。

















 7400
7400

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









