




 这篇博客介绍了图形学的基础,重点探讨了Taichi编程语言,它用于高效的并行计算和图形渲染。文章通过N体问题的模拟展示了Taichi的计算核和并行处理能力,同时提到了数据结构如标量、矢量和场的概念。作者还讨论了不同并行循环的效率差异,并给出了简单的可视化示例。
这篇博客介绍了图形学的基础,重点探讨了Taichi编程语言,它用于高效的并行计算和图形渲染。文章通过N体问题的模拟展示了Taichi的计算核和并行处理能力,同时提到了数据结构如标量、矢量和场的概念。作者还讨论了不同并行循环的效率差异,并给出了简单的可视化示例。
序
图形学,了解的不多。
只知道,写一点shader,可以渲染出图形。
但是,这个学,它所见即所得,比较直观,当然,对我这样的普通的人,很难,因为要用数学,而且我还不怎么会编程。
两点论,这个就是两点,优点,缺点。
大概是按着这个系列的视频来的太极图形的个人空间_哔哩哔哩_bilibili https://space.bilibili.com/1779922645/channel/seriesdetail?sid=337716
https://space.bilibili.com/1779922645/channel/seriesdetail?sid=337716
下面这个是一点相关的链接:
- GitHub上的课件:
taichiCourse01 (TaichiCourse) · GitHub
能把这个GitHub导入到gitee里吗?
- 在线taichi:
在线的话,浏览器web端,只支持CPU,可能会慢点。
- 文档
当然,我这样的小白,是看不懂文档的……里面有个示例代码。
Getting Started | Taichi Docs (taichi-lang.org)
下面的主要是视频合集里的第一个,看的时候记的一点东西。
太极图形课S1第00、01讲:课程概览,什么是图形学和taichi?taichi的数据、计算核与可视化_哔哩哔哩_bilibili
安装
pip install taichi我也只会这个了。
安好了吗?找点例子来试一试。就用上面文档里的吧。C,V,运行。
笔记本,3060,在我这样不会编程的人手里,就是暴殄天物呐……
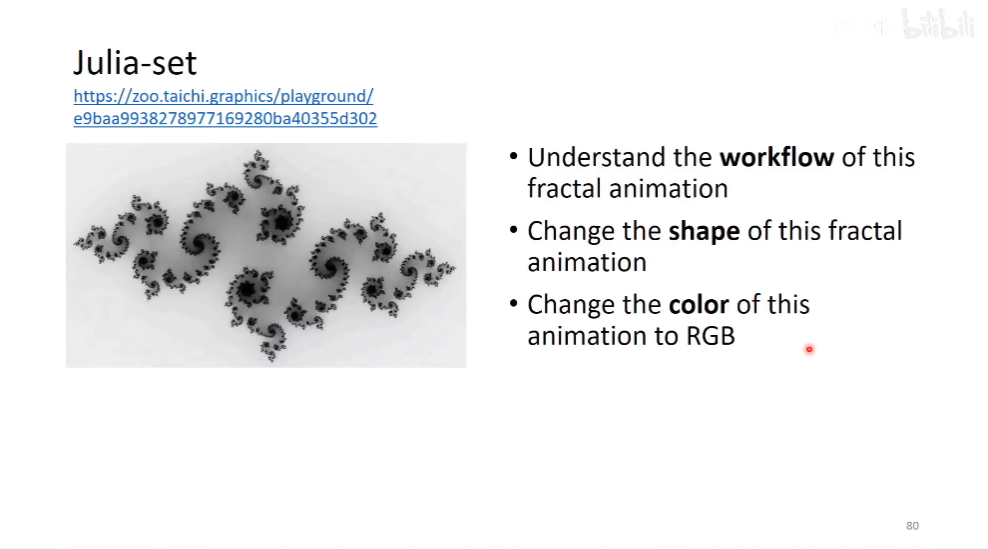
它的学名,叫Julia Set
好像改点参数,就会大变样,具体的不会。看看热闹算了……
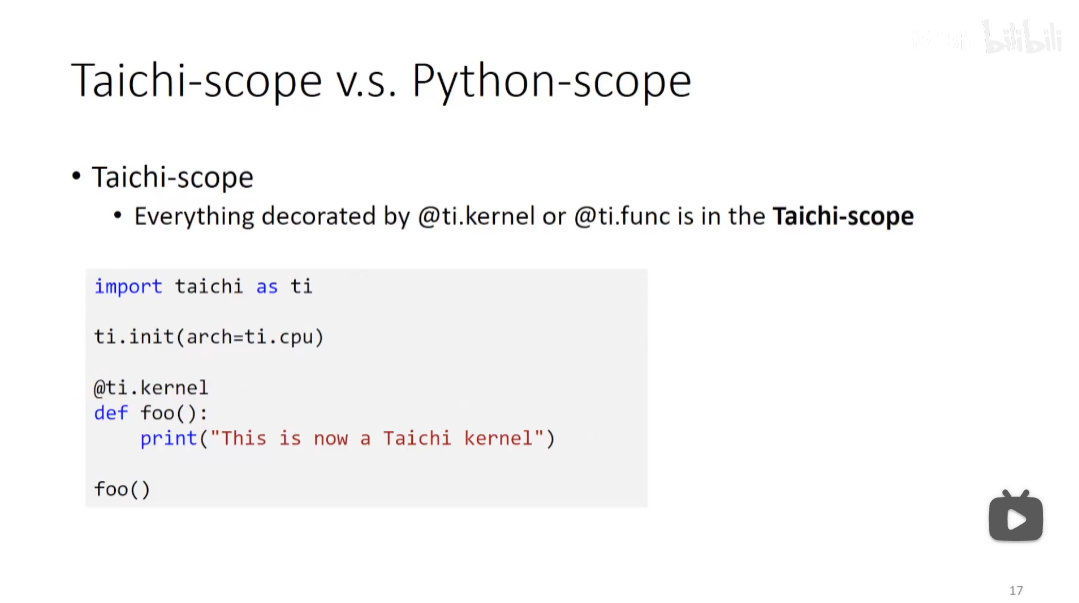
初始化一个Taichi程序
从这个开始,主要内容是hello world的程序。
程序在这里:
运行出来长这样:
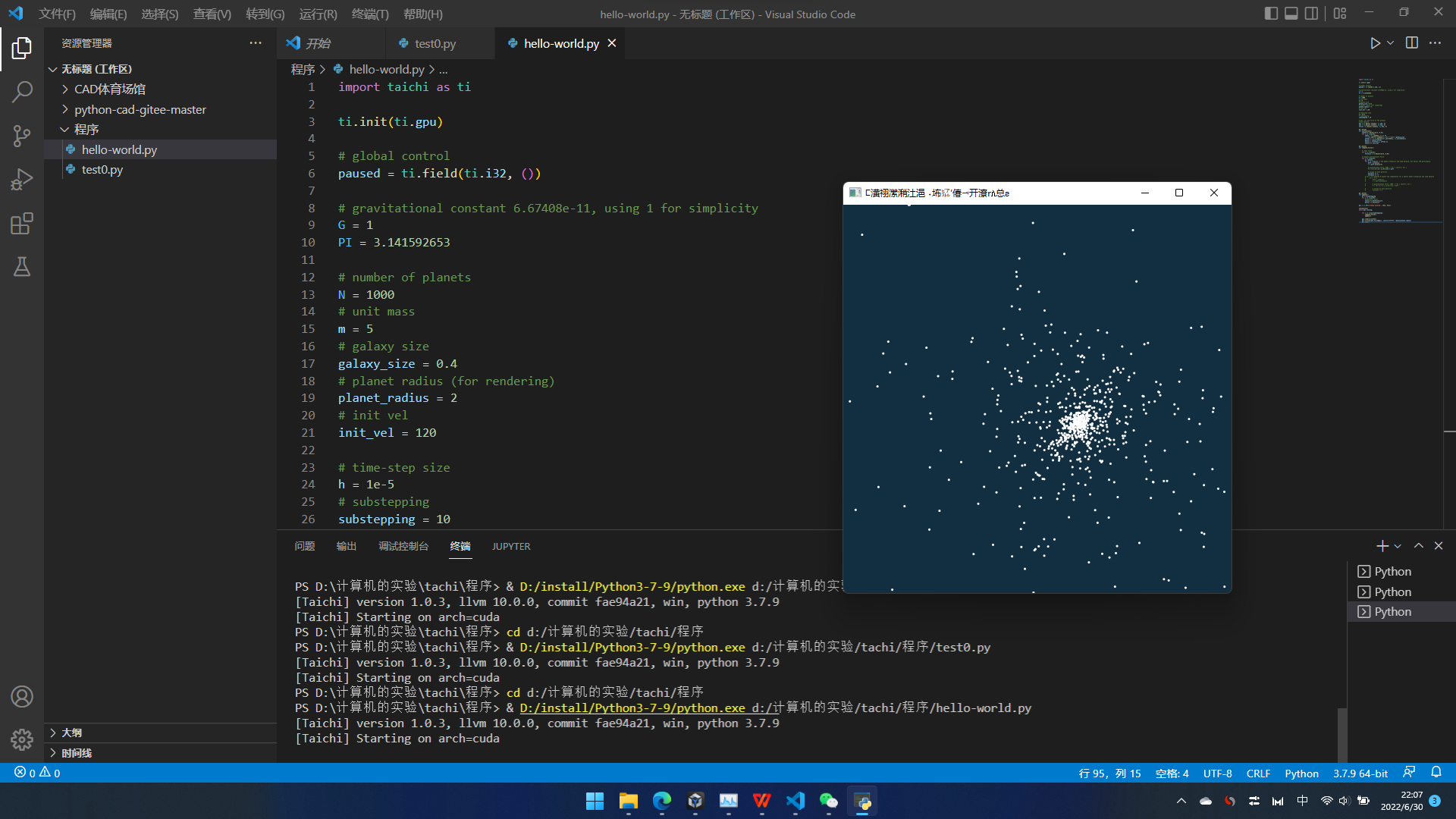
初始化,主要靠这两行。 那个init,是程序入口。
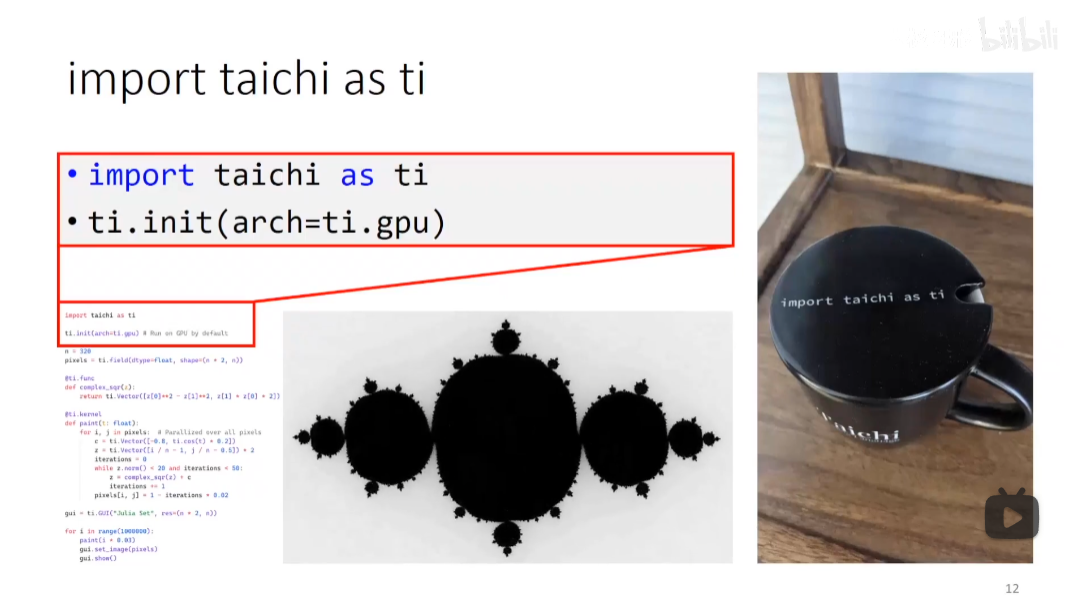
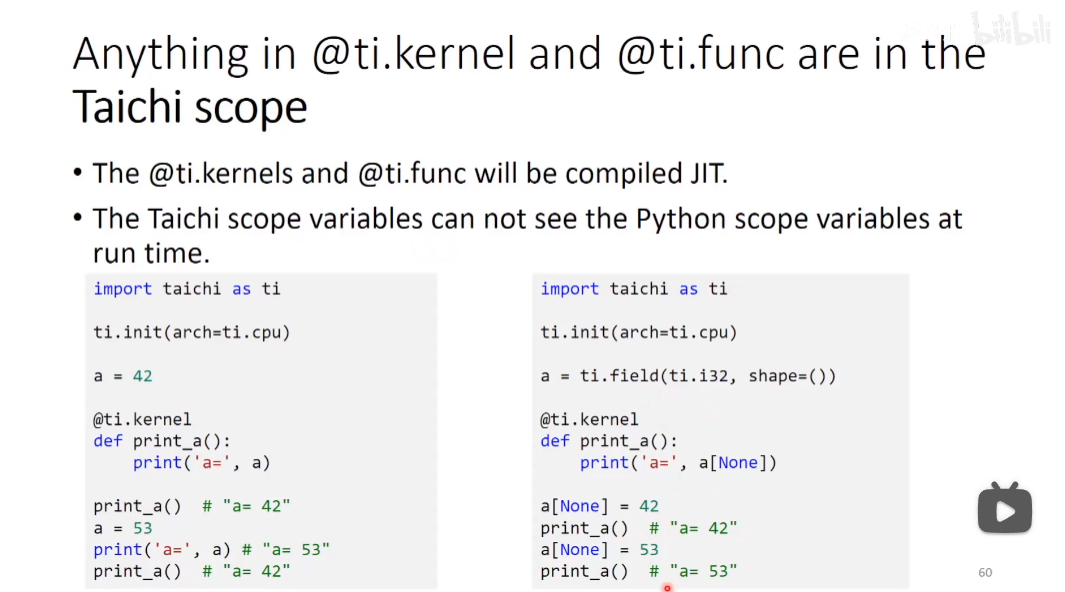
scope:范围。
不是所有的代码都是taichi代码,在范围内的才是。
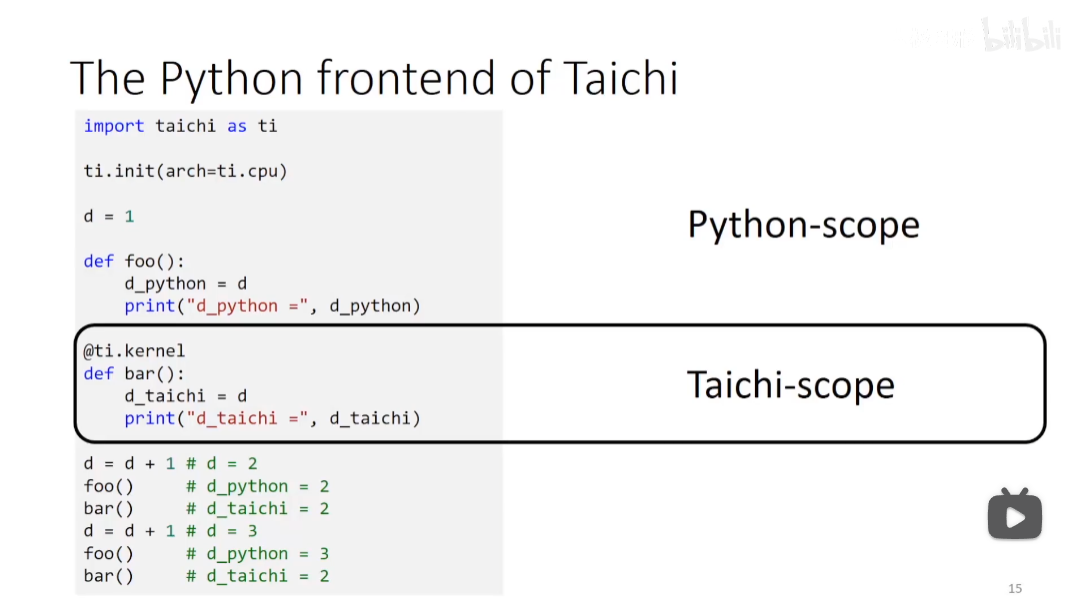
再具体点,在这俩范围内的才是。
组织Taichi的数据
数据。。图形什么的。
图形就是数据计算出来的嘛。
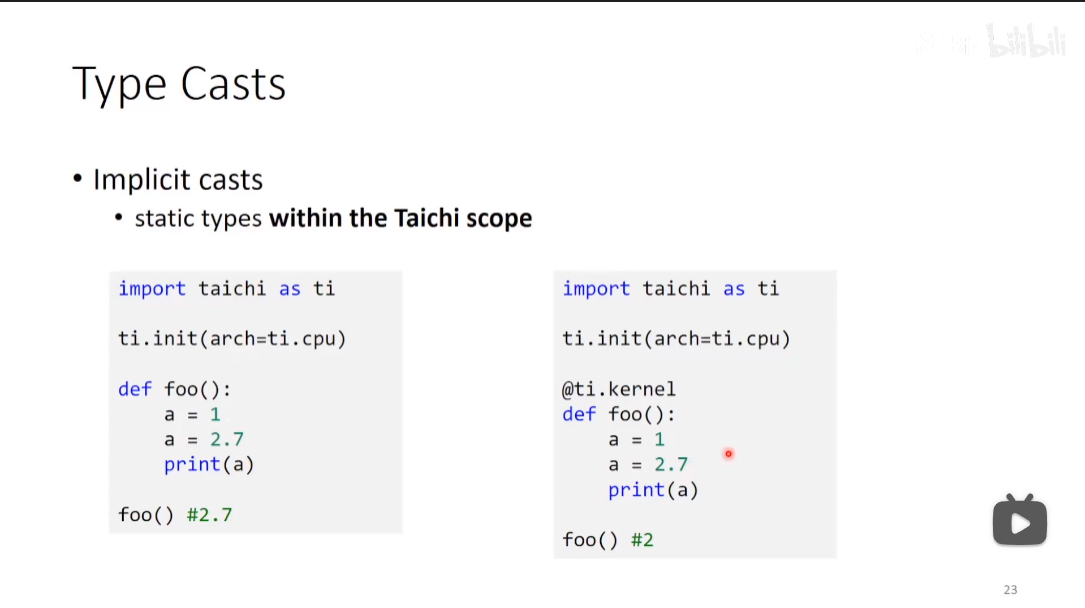
标量
隐式转换
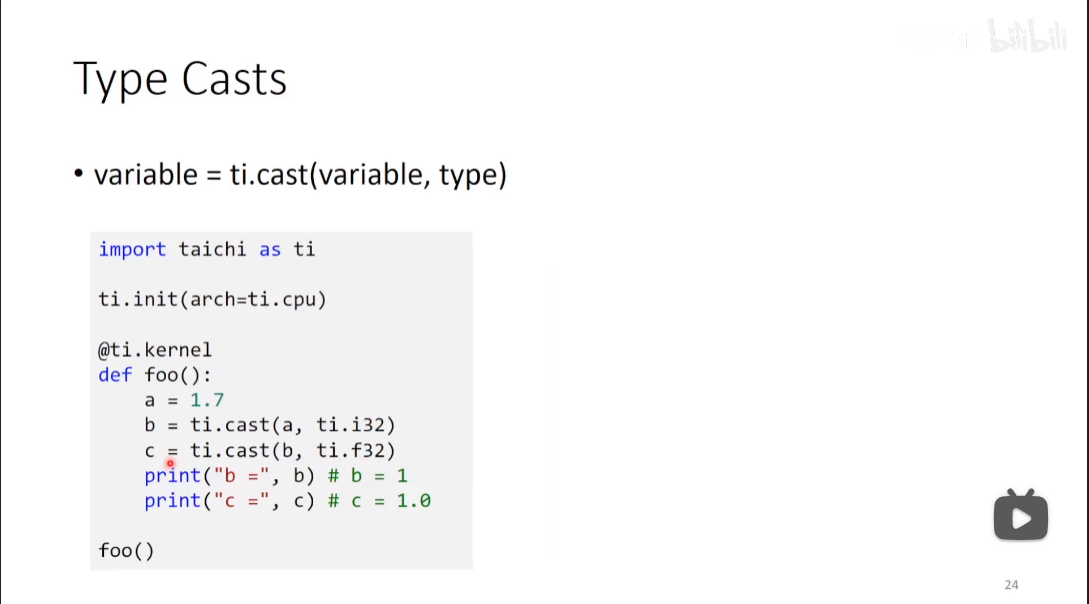
 显示转换
显示转换
矢量
向量,矩阵,一个记录了起点,方向,长度的表示RT里一条光线的结构体什么的,都是矢量。
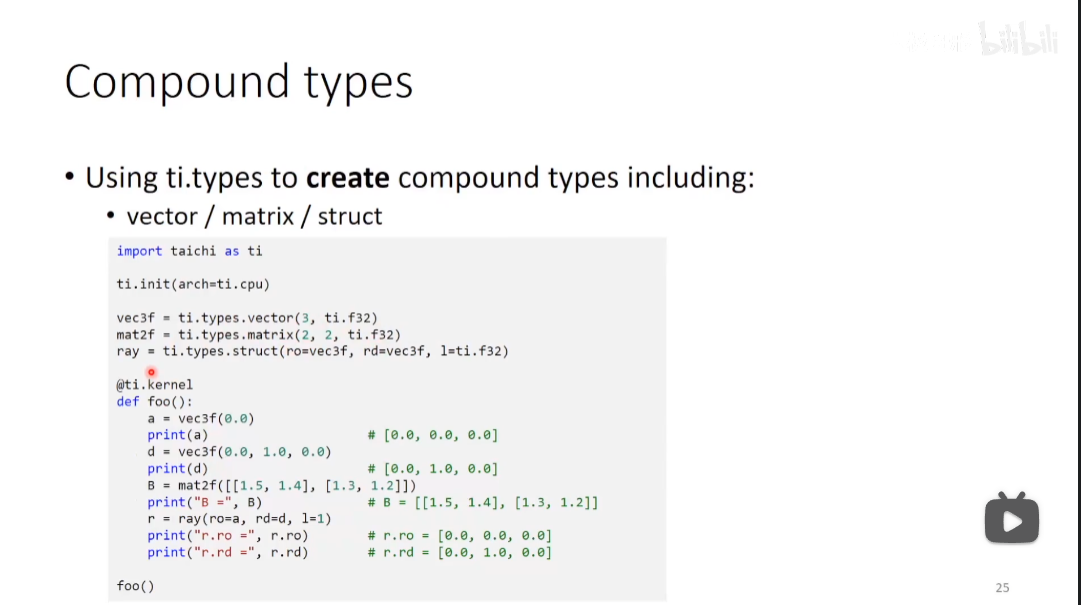
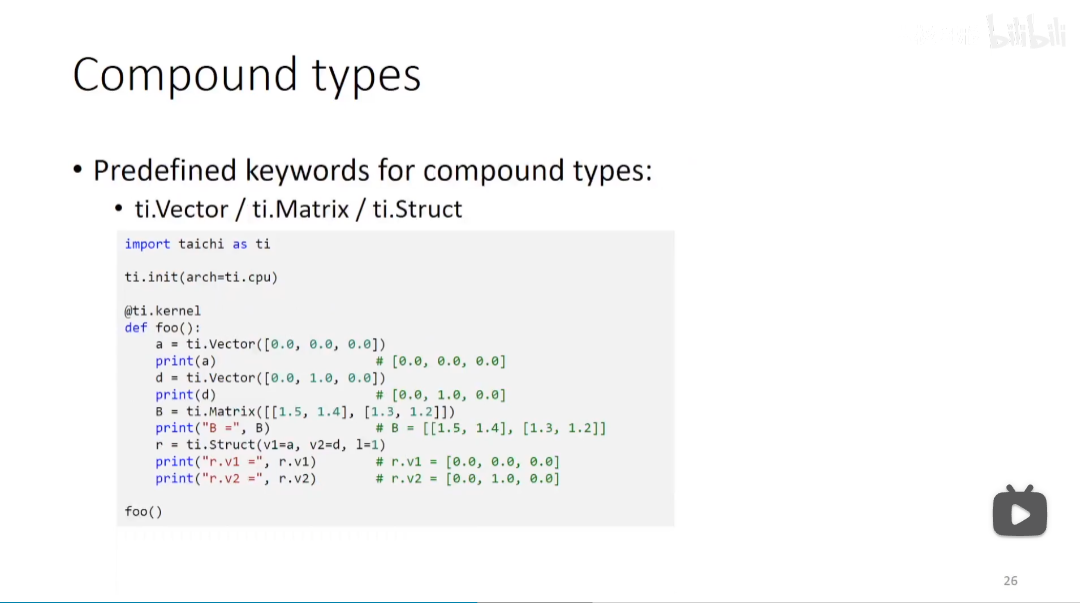
为了简化矢量的定义,还提供了相关的关键字
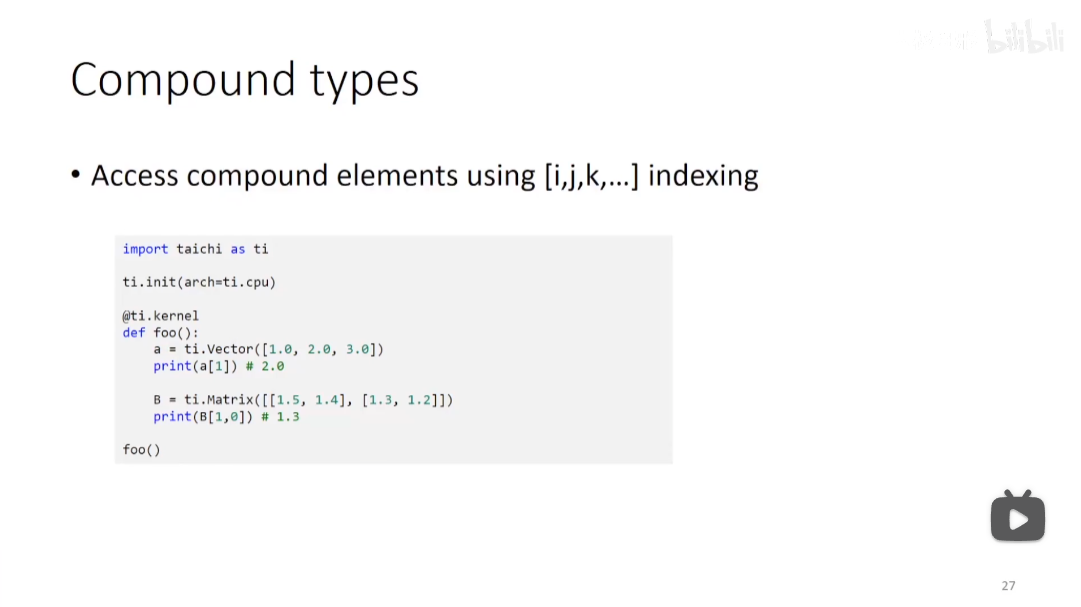
这些矢量,可以用索引访问,就像python
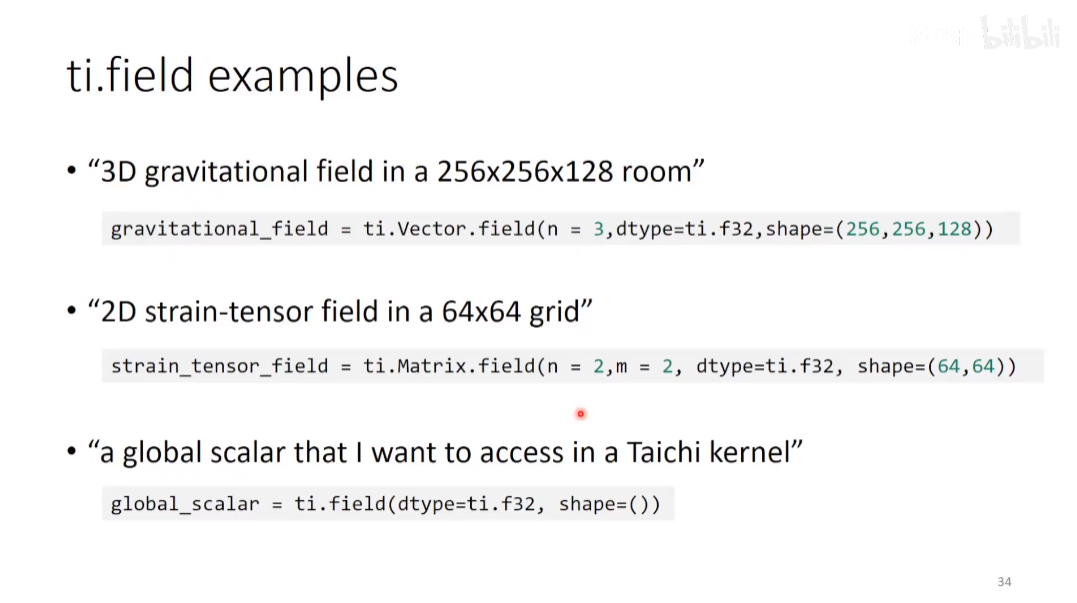
这个,别的没有。可以表示256*256的热力图
field:域,场
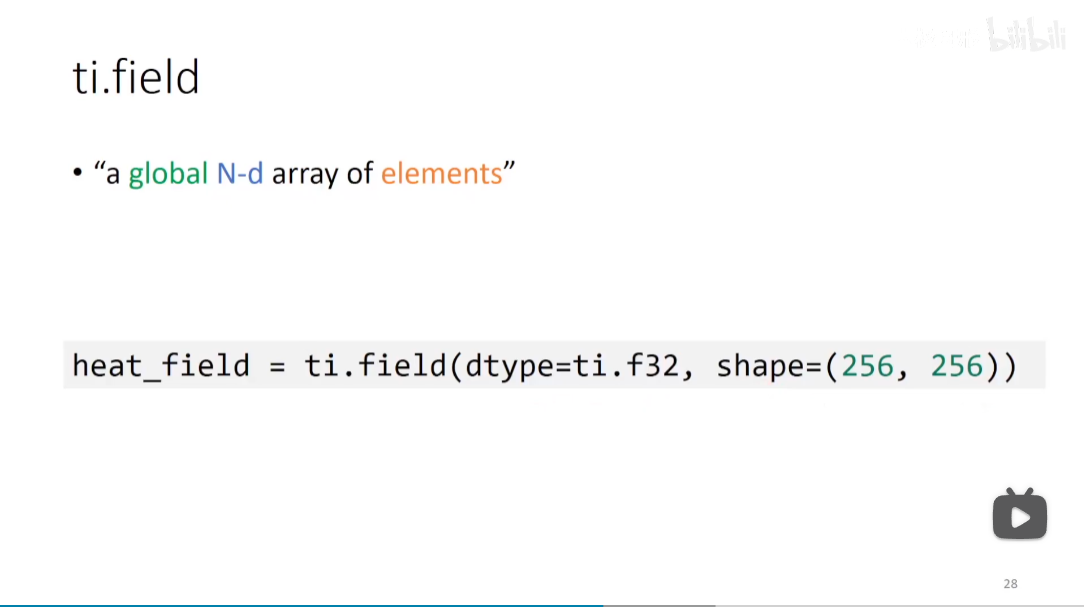
猜一下,这个是干嘛的?
OpenGL的帧缓冲区?存像素的?有可能。
怪不得这个变量其他编程语言没有……
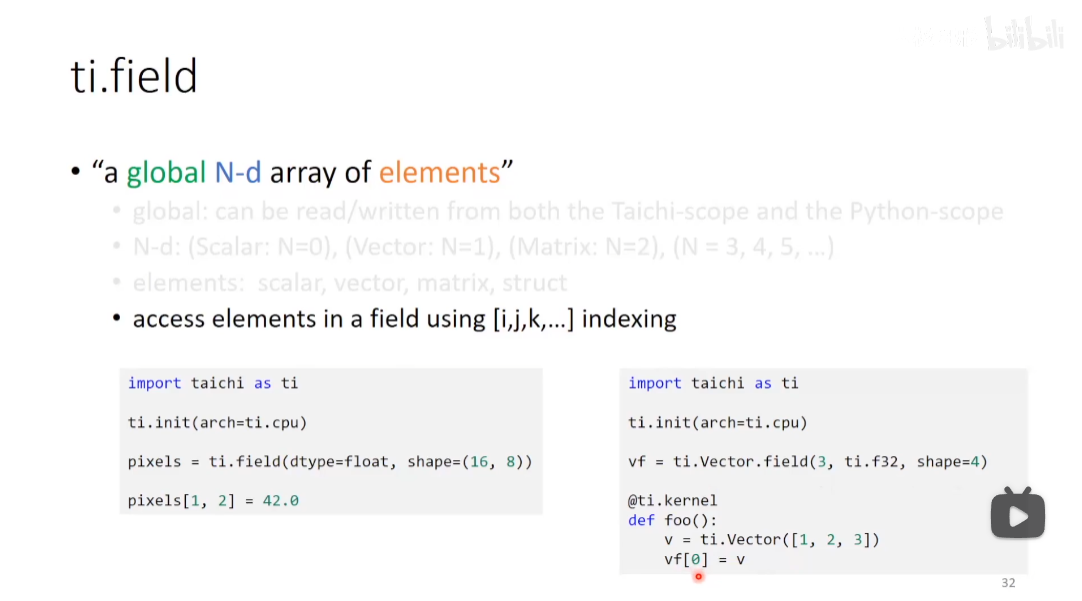
全局的,灵活的。
也可以通过索引访问
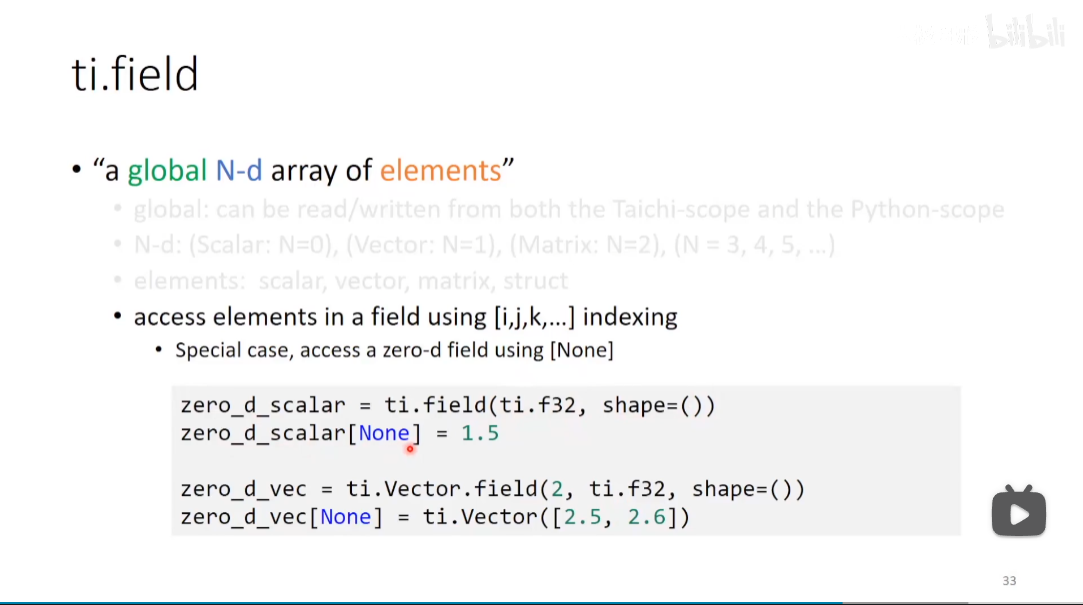
标量场?NONE?
一点例子
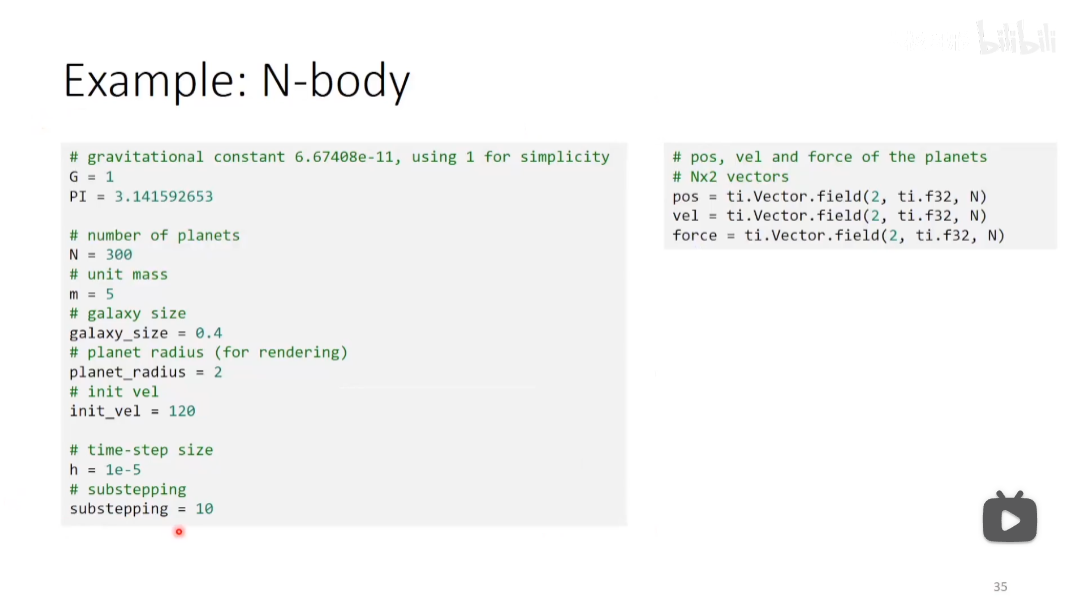
 上面那个你好世界,学名叫N体系统,就用到了这些变量,数据。
上面那个你好世界,学名叫N体系统,就用到了这些变量,数据。
左边是python的,右边是taichi的数据。
了解Tahichi的计算核
大概是这俩
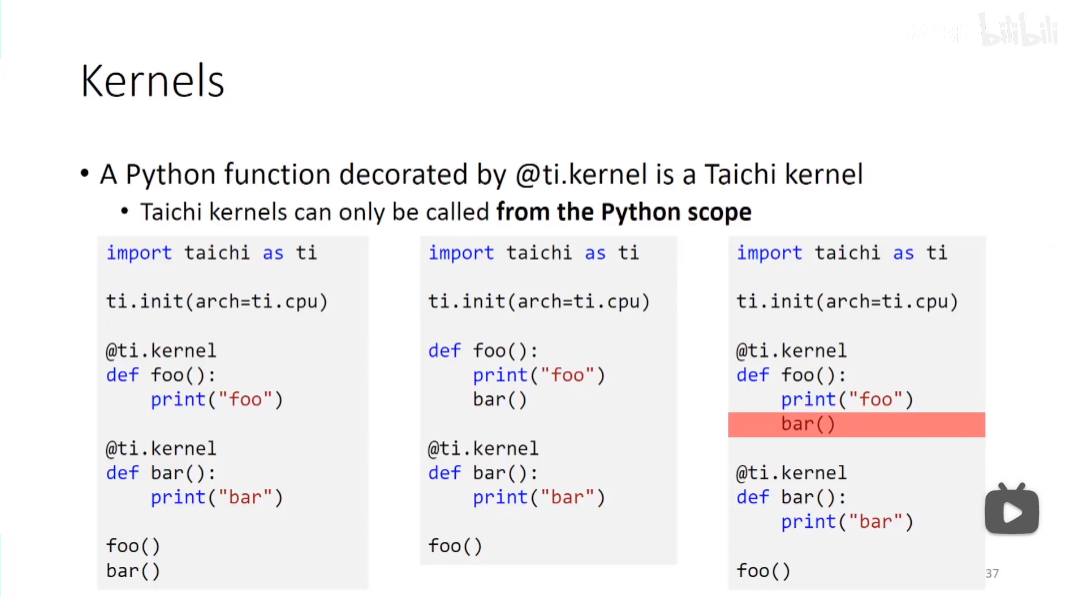
这俩的存在有啥意义?
ti.kernel修饰的,会被并行执行,快。
 并行处理……双重for循环……CAD直线的连接?
并行处理……双重for循环……CAD直线的连接?
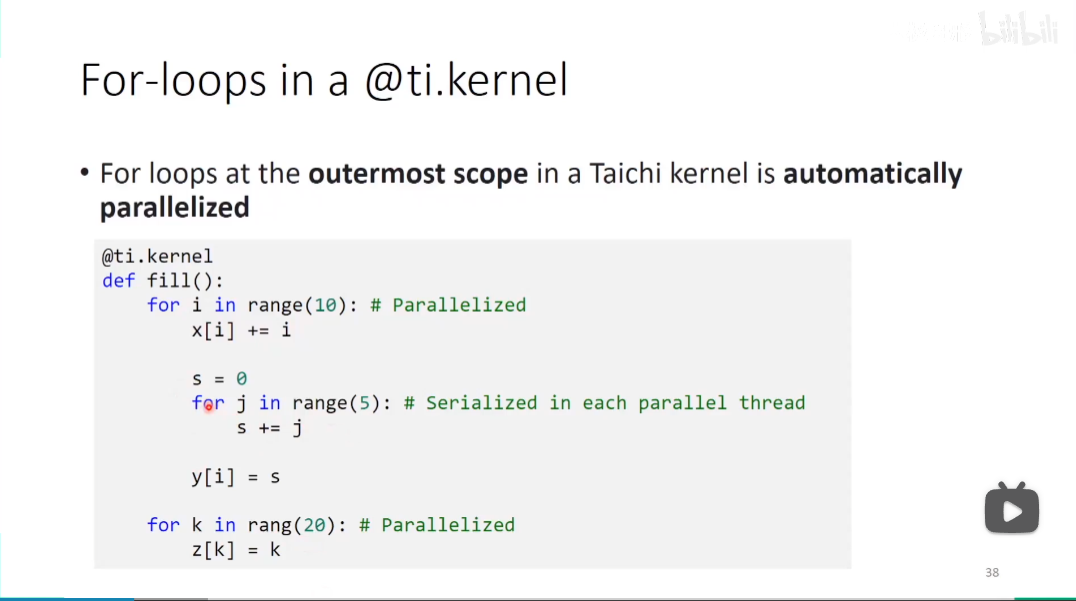
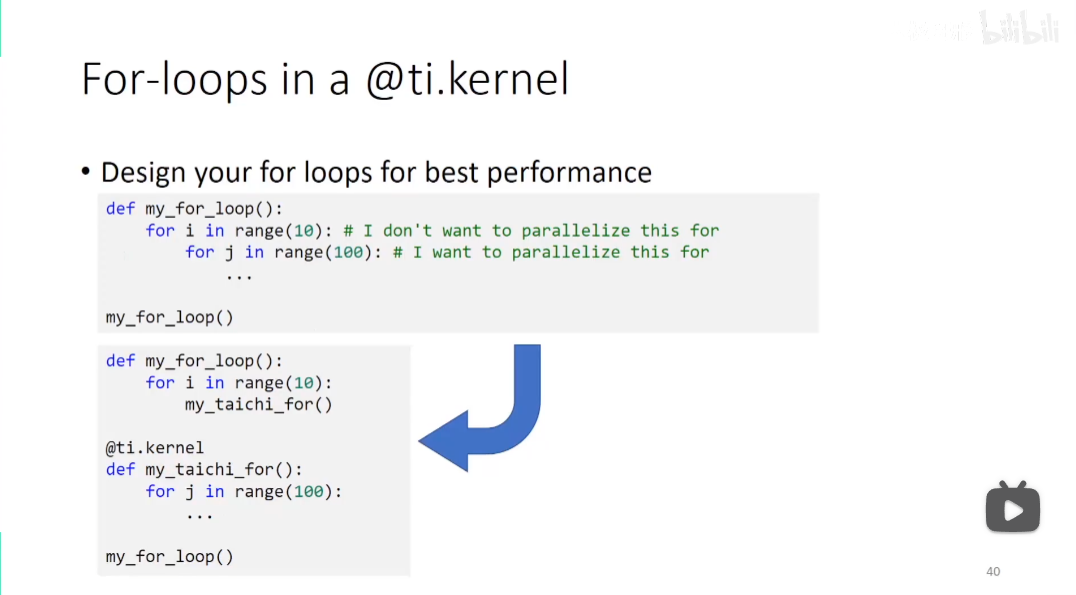
Taichi里最外层的for循环,可以被并行化,也只有这个情况才能并行化。
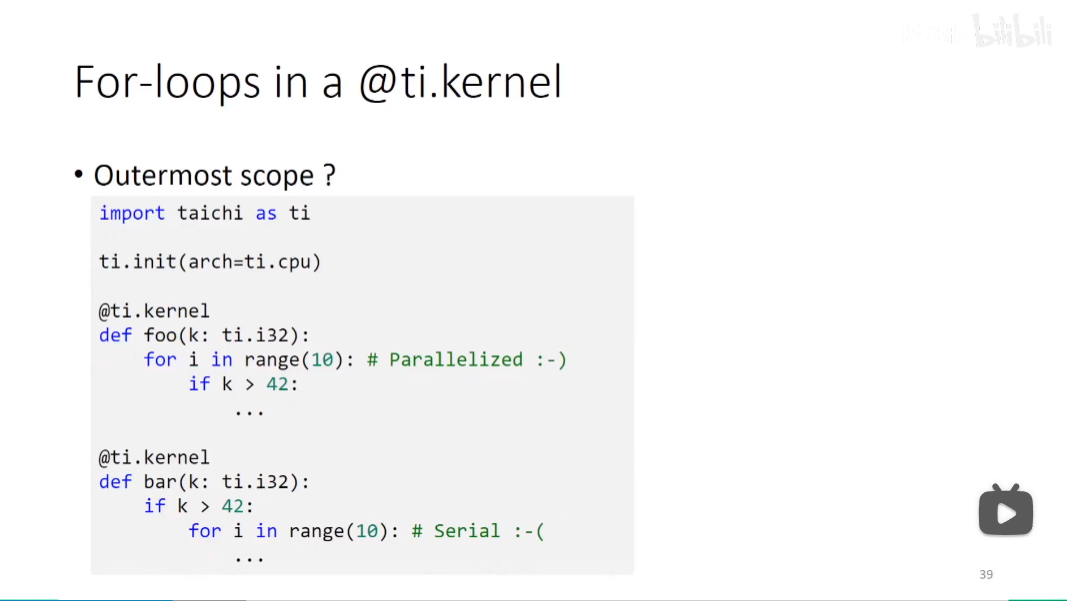
所以,为了按需并行,有时得改变一下写法
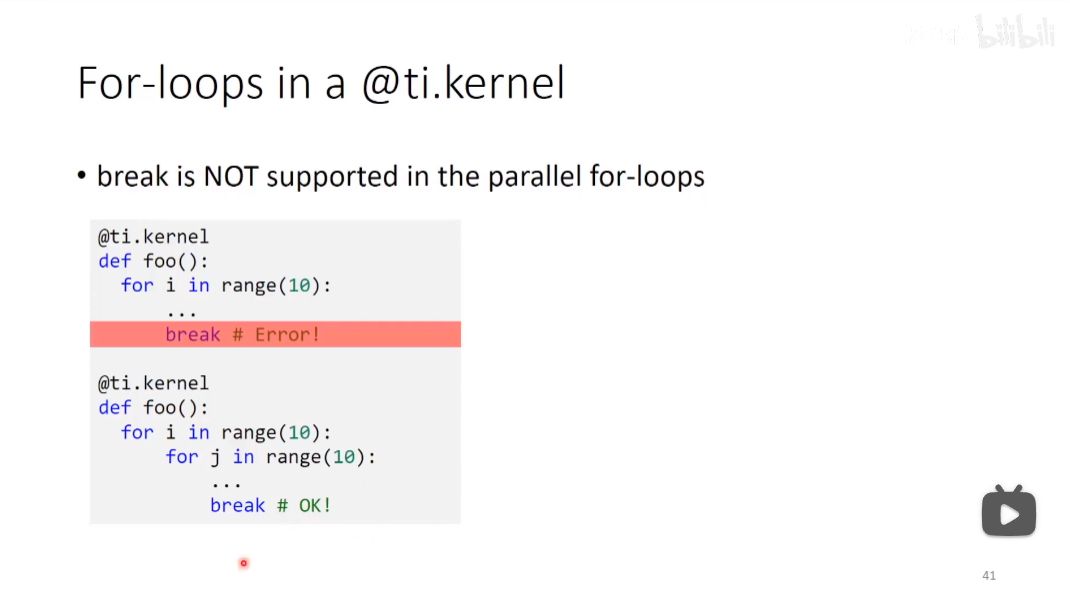
并行了以后,快了。但是,世上事情难两全。比如,并行了break就不能用了,因为相互之间独立了。
并行,+=会自动加锁。第3个的话,不会自动加锁,可能并行出问题。

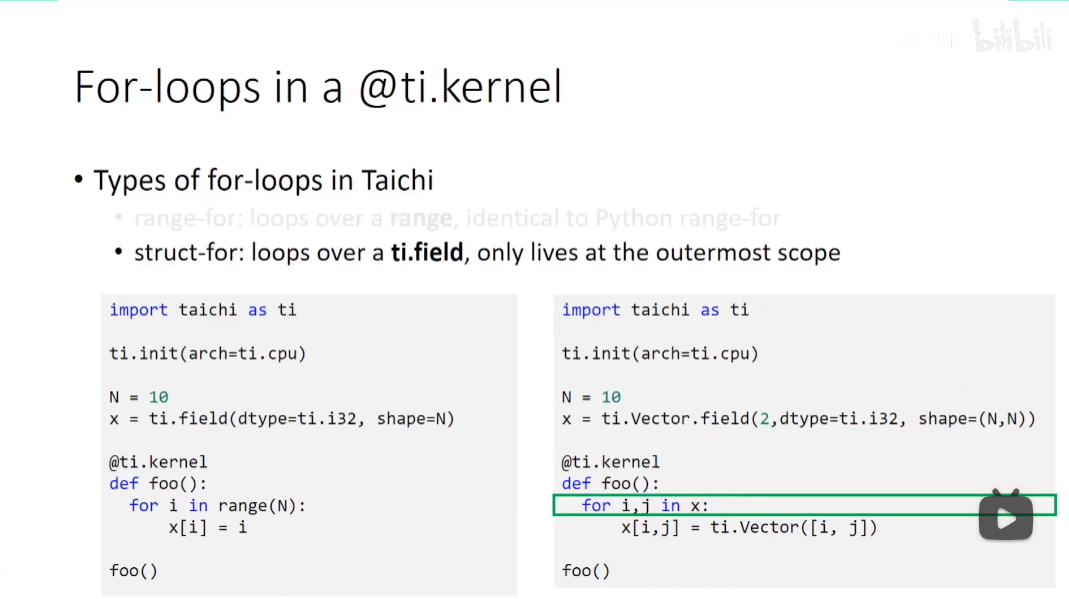
特有的for迭代,只在最外层支持。
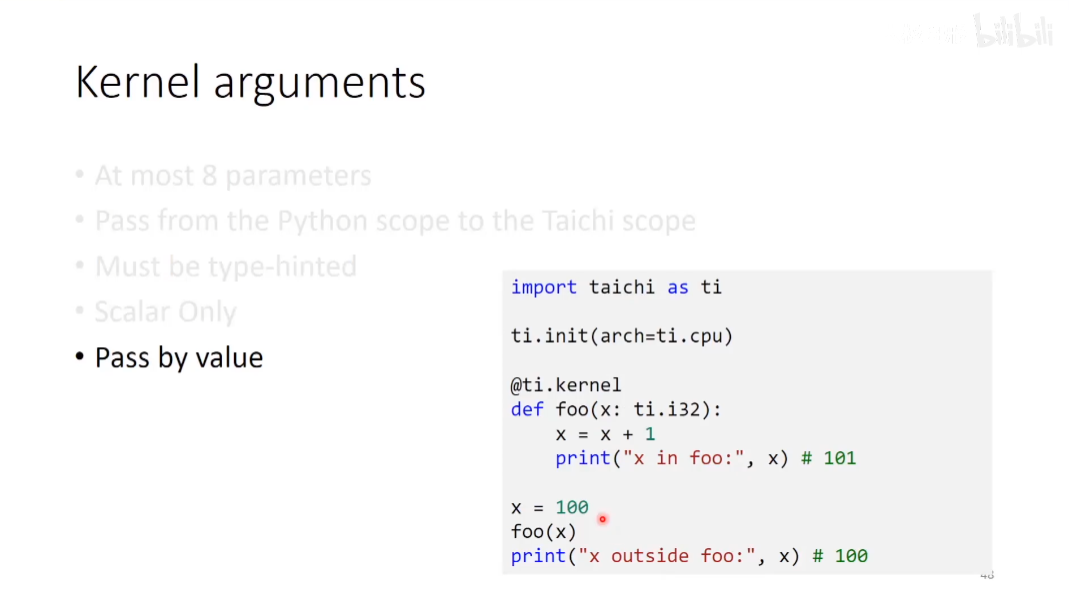
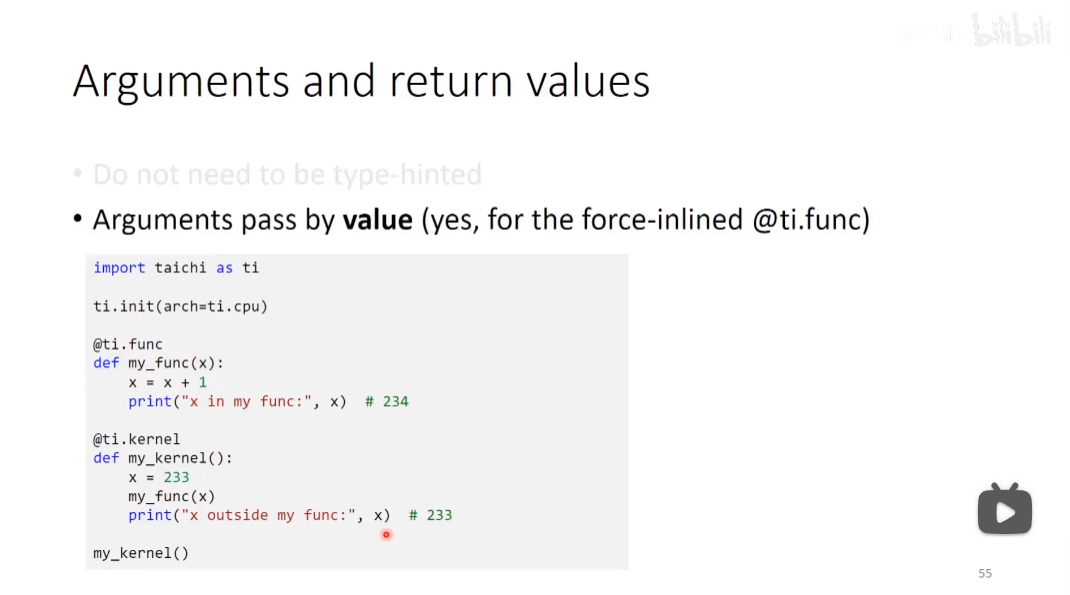
从python向taichi传参的时候,需要写类型。
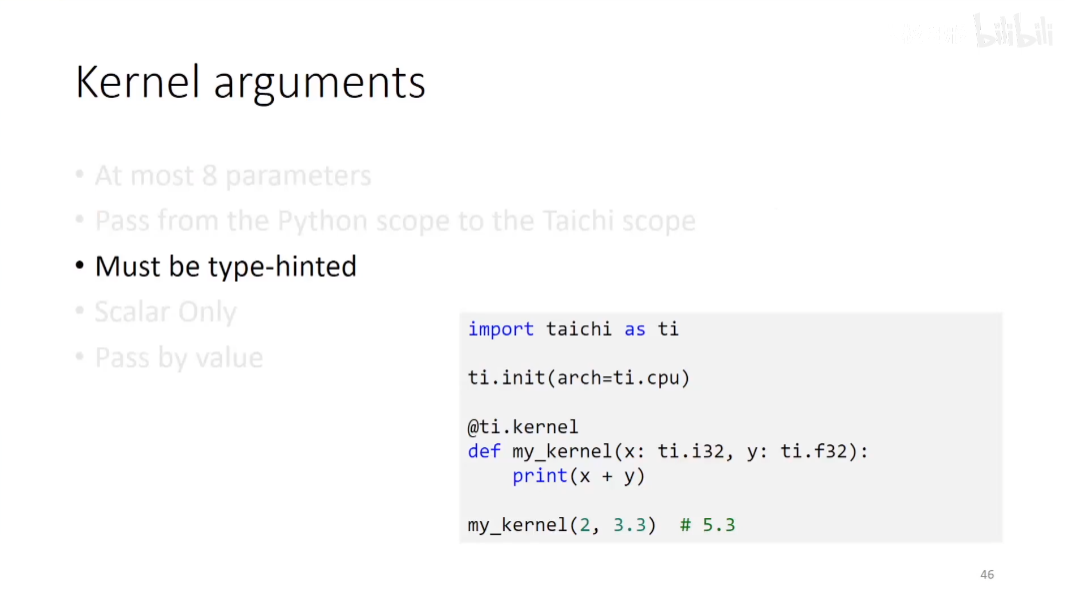
目前只能传标量,传矢量得手动搞一搞。
 都是值传递
都是值传递
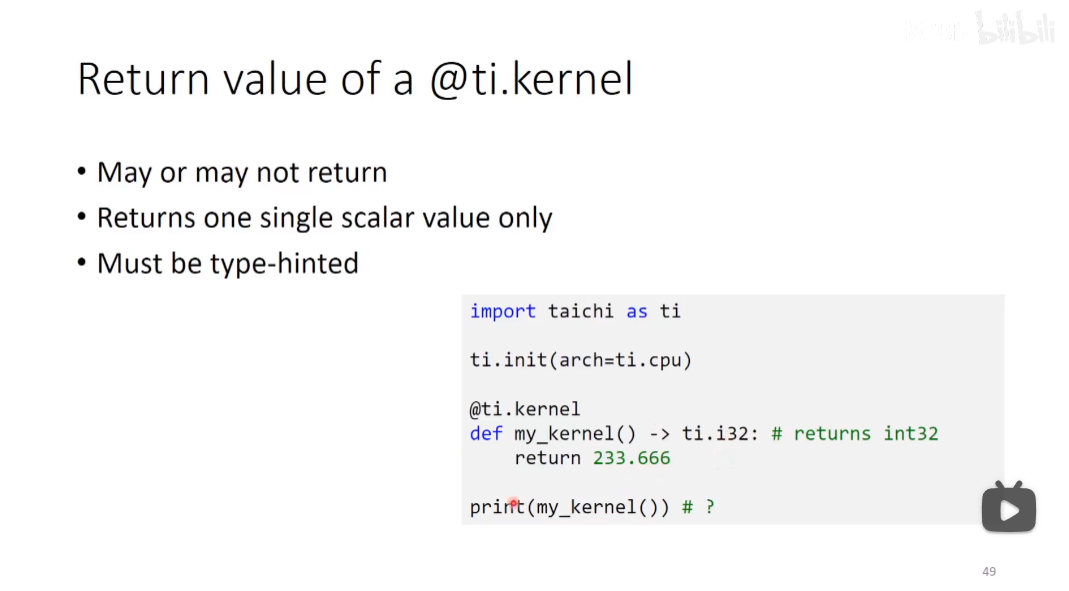
返回值,会返回233
下面的是,那俩的另一个。它只能被ti.kernel调用。
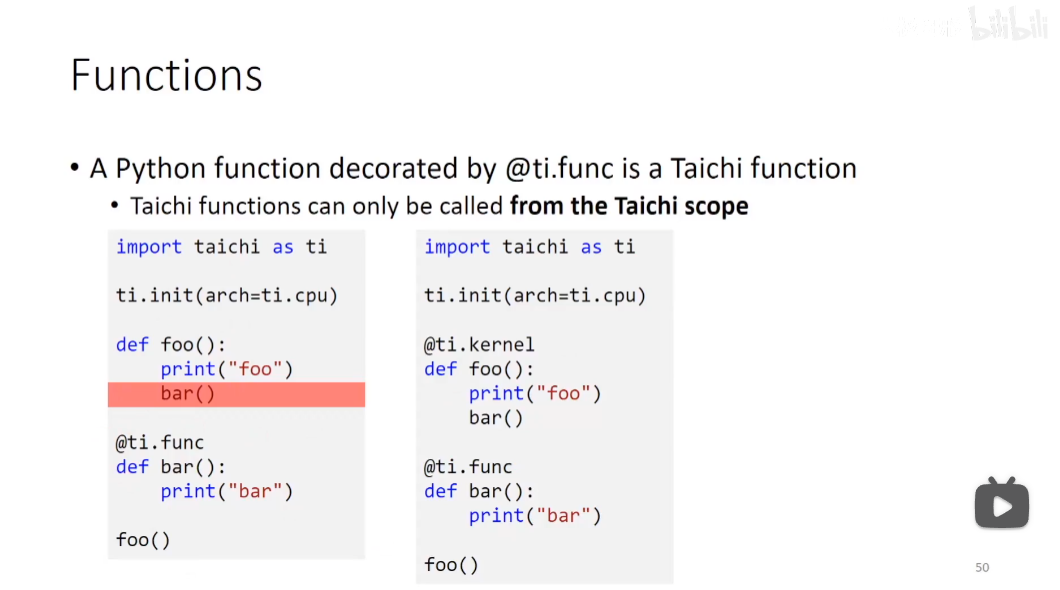 好像是在taichi里起复用的作用的。
好像是在taichi里起复用的作用的。
可以嵌套,但是不能递归,因为强制内联了
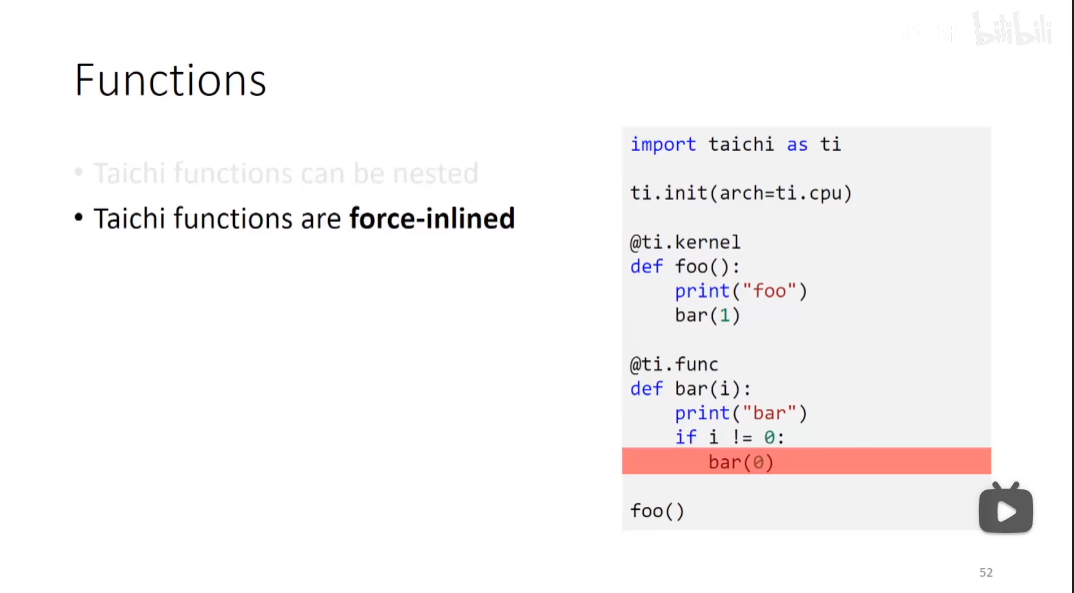
拷贝了一次,值传递的内联,不是那种宏的单纯替换的内联
 一定要带出来,可以return
一定要带出来,可以return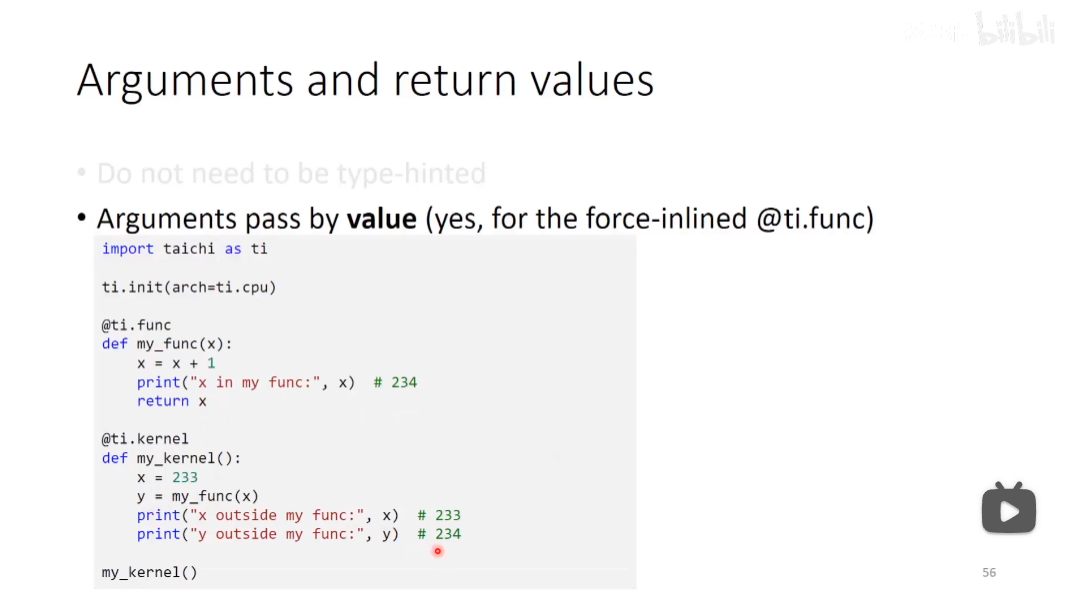
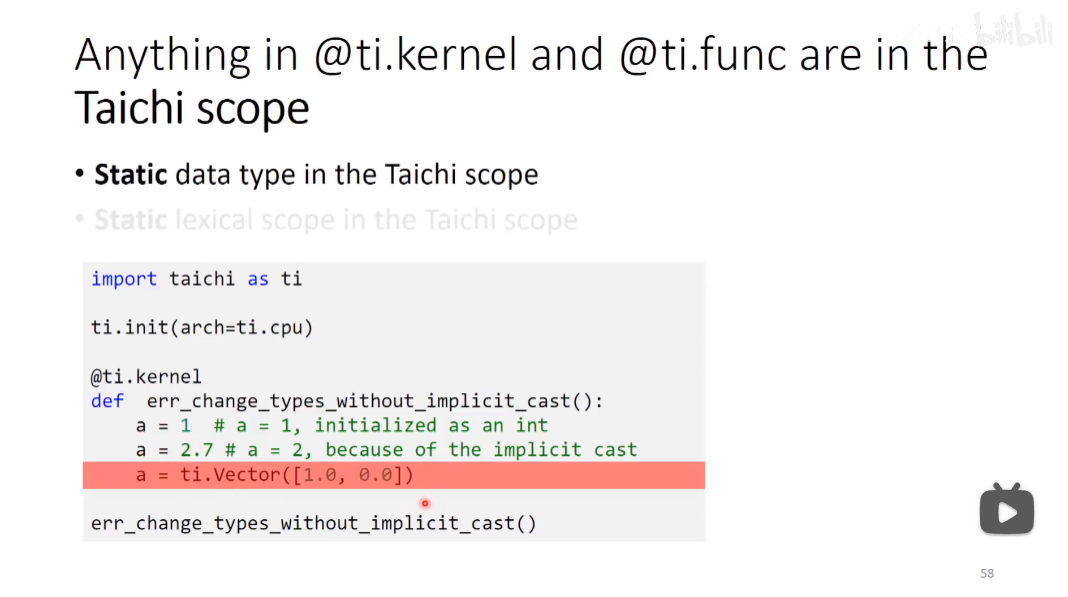
都是静态的
释放掉以后,再打印就报错
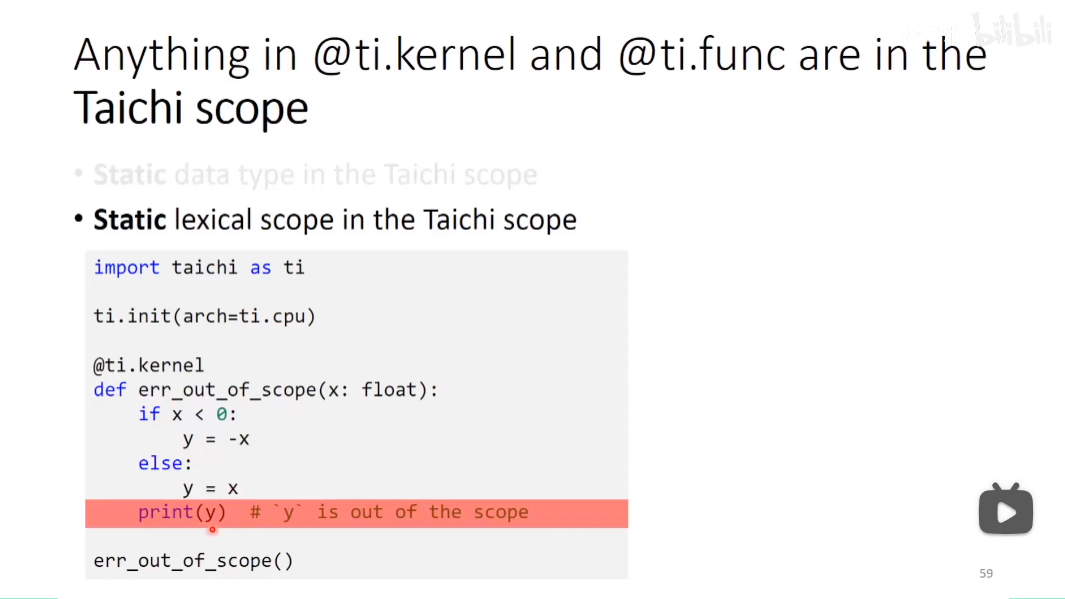 只有field,才是全局的。
只有field,才是全局的。
为什么这么设计?——大概是因为Python是弱类型,两次调用同一个函数的时候全局变量可能已经是不同的类型了。所以Taichi才做了这样的设计。
有的弹幕说的——感觉一切的设计,都是为了并行化,有道理呐……
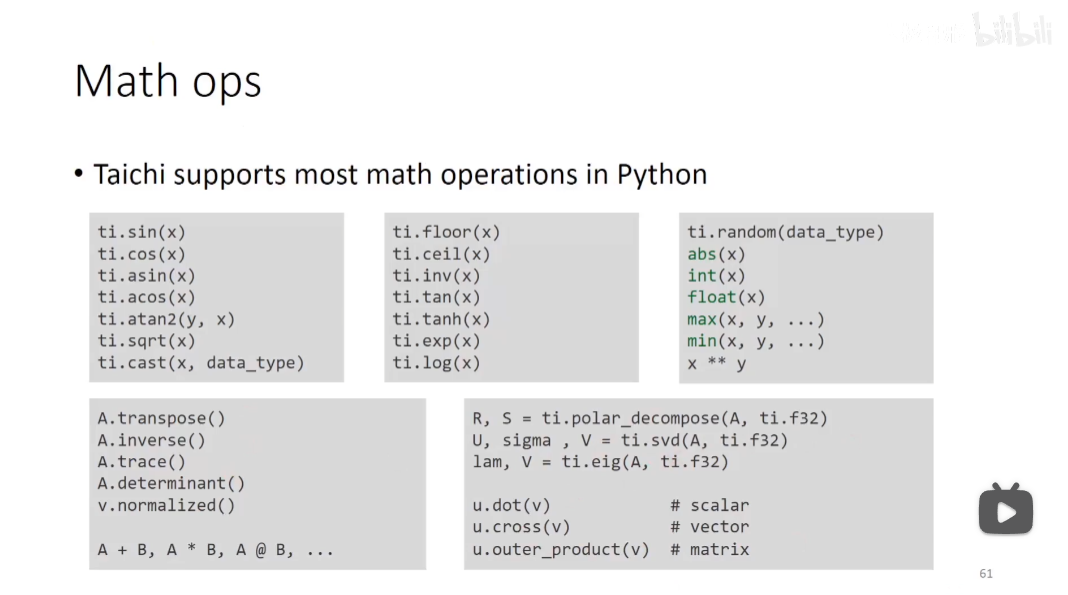
若干数学运算
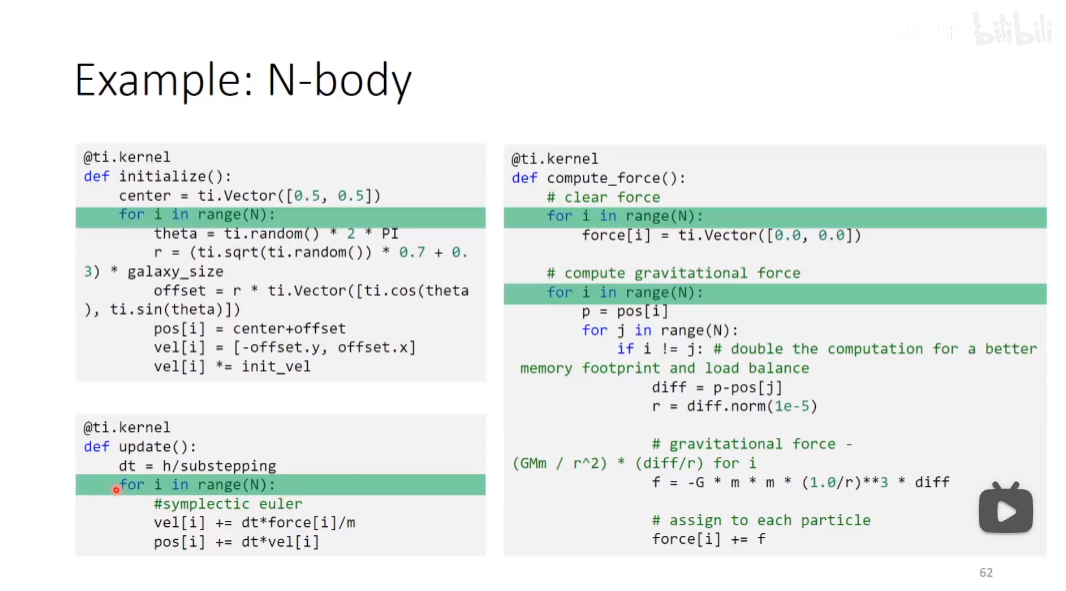
回到你好世界,看一看这些并行化的for
可视化Taichi程序
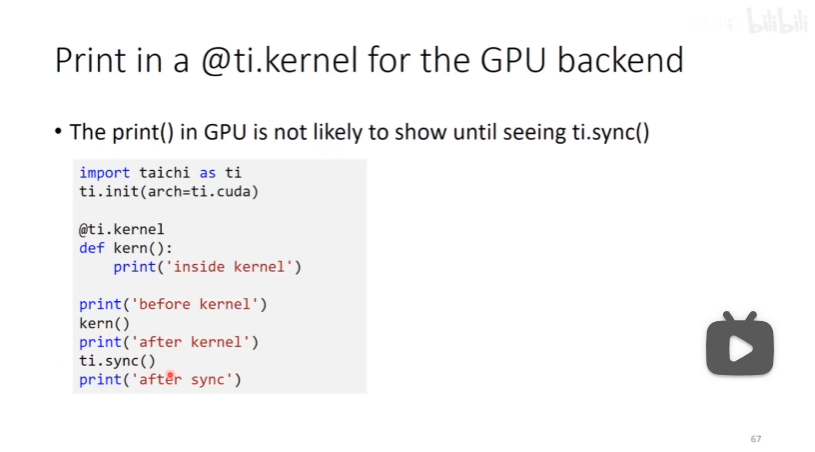
print,其实也算可视化……
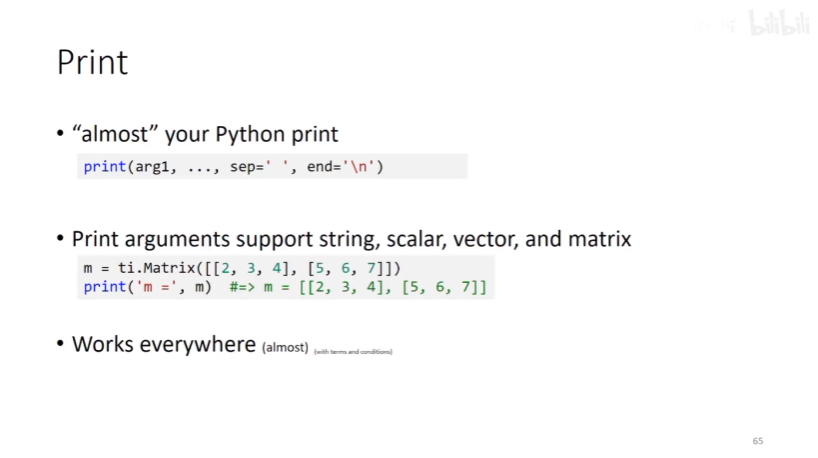
这个print,和python的稍微有点不同。比如,并行print会不按顺序来,是随机的。
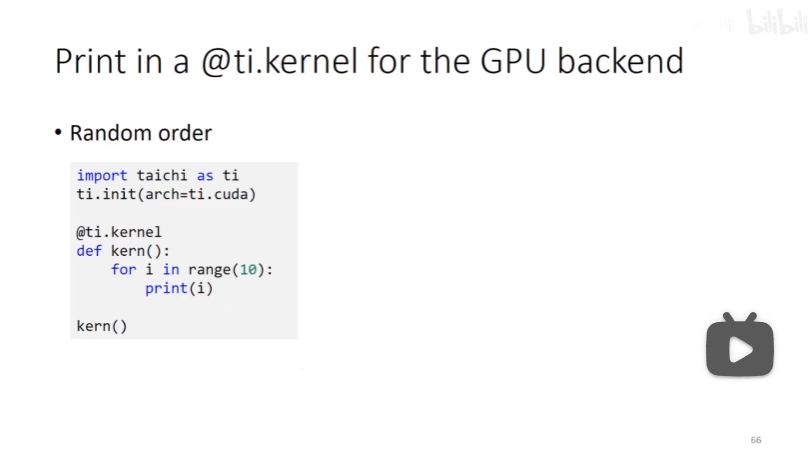
也不一定会按前——中——后的顺序来
GUI
G_U_I,龟。
很多函数
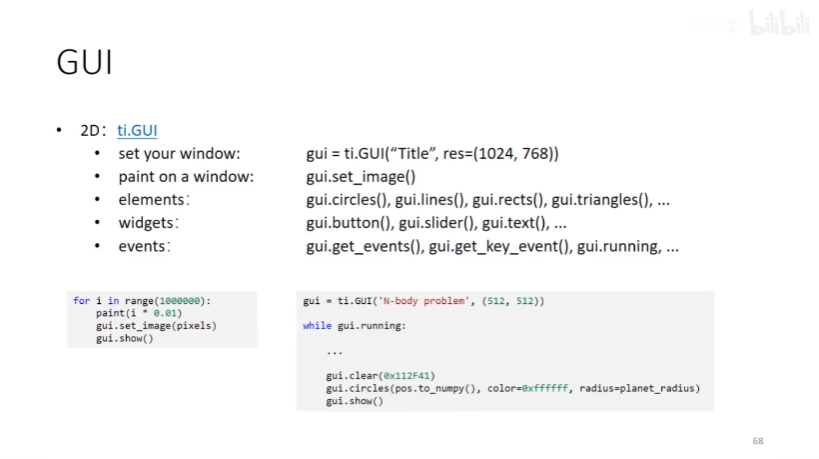
目前,比较慢,只有2D
想3D的话,可以导出为PLY,送到hodini里去渲染。
讲完了这些,就可以去你好世界了。
程序设计方面,就没啥问题了。
大概是这个流程。
doc是最好的老师……
但是,我这样的,看不懂啊……
现在的话,可以把julia-set分形这玩意搞明白,改一改。
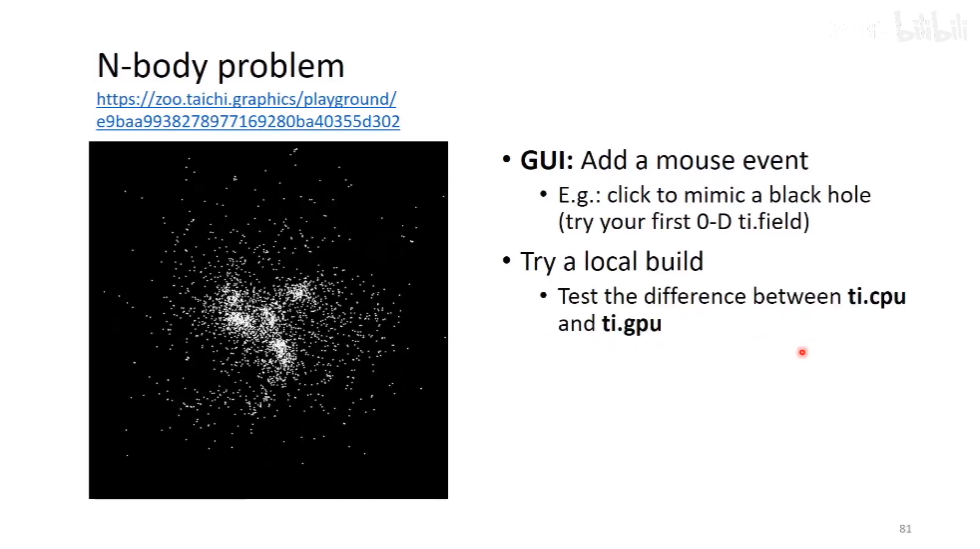
对物理仿真感兴趣的话,可以搞一搞这个多体问题
没了。结束。
你好-世界
N体问题的解释。
数学原理
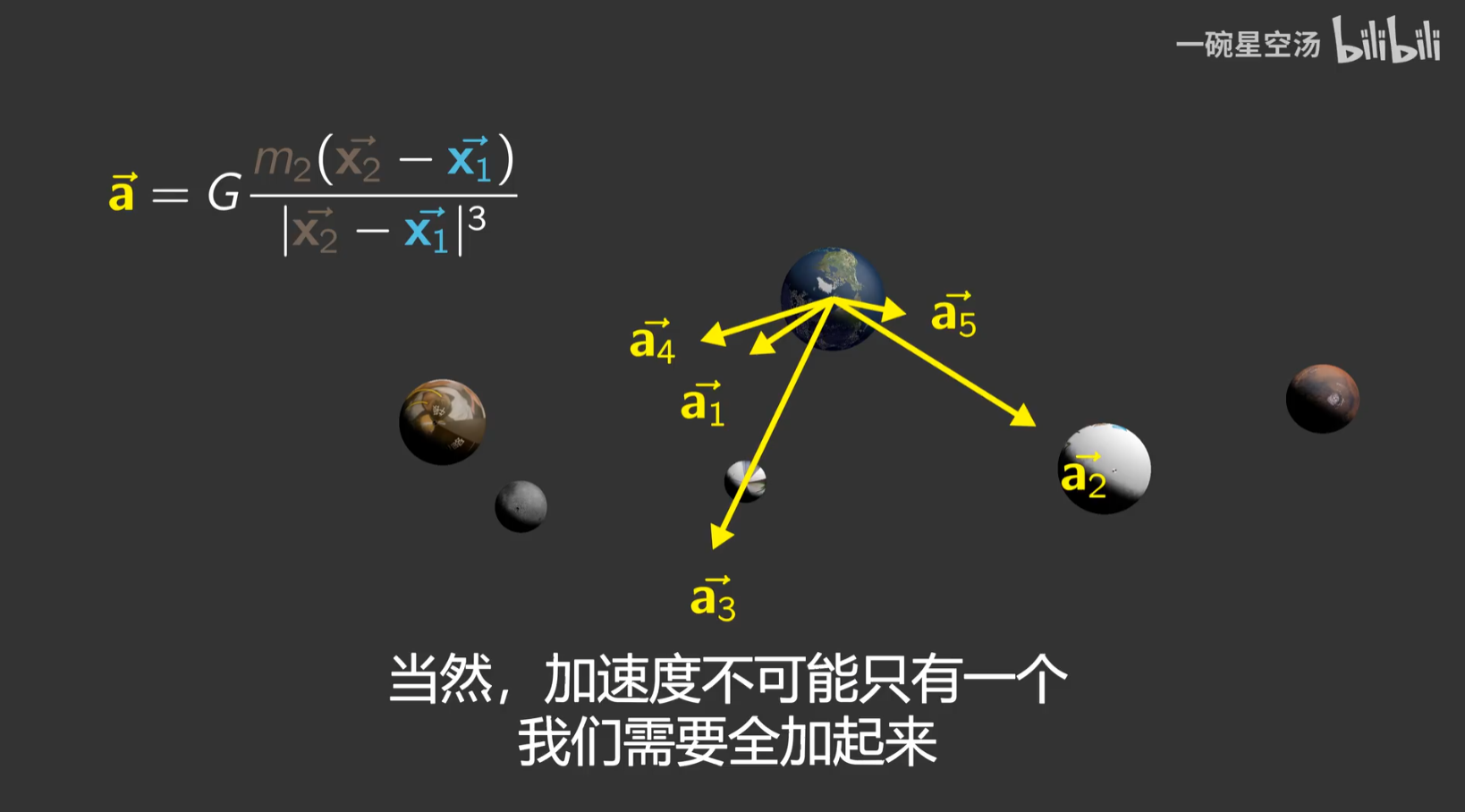
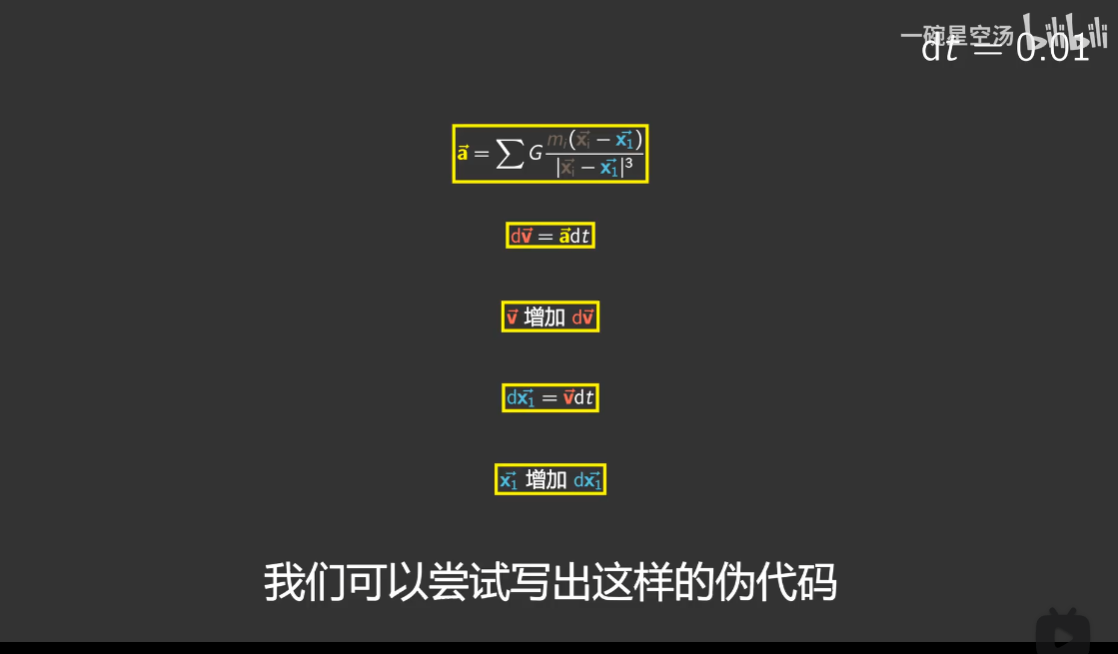
上面那个视频里介绍了其中的数学原理,简单的说,就是这个:
相互作用,共同运动。
具体实现(Taichi)
import taichi as ti
ti.init(ti.gpu)
# global control
paused = ti.field(ti.i32, ())
#一些常数的设置
# gravitational constant 6.67408e-11, using 1 for simplicity
#引力常数,是一个很小的值,这里设置为1,为了简化
#G=6.67408e-11
G = 1
PI = 3.141592653
# number of planets
#天体数量
N = 1000
# unit mass
#天体质量
m = 5
# galaxy size
galaxy_size = 0.4
# planet radius (for rendering)
planet_radius = 2#2pixel
# init vel
#初始化速度
init_vel = 120
# time-step size
#仿真时间间隔,10微秒
h = 1e-5
# substepping
#把每个10微秒再分成10步
substepping = 10
# pos, vel and force of the planets
# Nx2 vectors
#每个天体的位置、速度、力;场,域
#一个天体的位置,需要一个2维向量
#N个就需要N个,很合理
pos = ti.Vector.field(2, ti.f32, N)
vel = ti.Vector.field(2, ti.f32, N)
force = ti.Vector.field(2, ti.f32, N)
#####数据处理
@ti.kernel
def initialize():
center=ti.Vector([0.5, 0.5])#屏幕范围1*1,左下角是0,0;右上角是1,1;中间是0.5,0.5
for i in range(N):
theta = ti.random() * 2 * PI
r = (ti.sqrt(ti.random()) * 0.7 + 0.3) * galaxy_size#【0.3,1.0】,单纯的距离标量
offset = r * ti.Vector([ti.cos(theta), ti.sin(theta)])#变成了矢量
pos[i] = center+offset
vel[i] = [-offset.y, offset.x]#圆周运动,速度和半径垂直
vel[i] *= init_vel
@ti.kernel
#一个大kernel中的若干小for循环,编译的时候会被拆分成若干的小kernel
def compute_force():
# clear force
#首先,把每个物体受力清0
for i in range(N):
force[i] = ti.Vector([0.0, 0.0])
# compute gravitational force
for i in range(N):
p = pos[i]
#这下面的两个for循环,结果完全一样,但是效率不同
#两两比赛的那种,换了个方向而已,原来是向后,现在是向前
#用牛三的相互作用,省了一半
for j in range(i): # bad memory footprint and load balance, but better CPU performance
diff = p-pos[j]
r = diff.norm(1e-5)
#万有引力公式。**3表示3次方
# gravitational force -(GMm / r^2) * (diff/r) for i
f = -G * m * m * (1.0/r)**3 * diff
#牛顿第三定律,力的作用是相互的
# assign to each particle
force[i] += f
force[j] += -f
# for j in range(N):# double the computation for a better memory footprint and load balance
# if i != j:
# diff = p-pos[j]
# r = diff.norm(1e-5)
# # gravitational force -(GMm / r^2) * (diff/r) for i
# f = -G * m * m * (1.0/r)**3 * diff
# # assign to each particle
# force[i] += f
@ti.kernel
#有了力以后,就可以更新位置了
def update():
dt = h/substepping#10/10=1
for i in range(N):
#symplectic euler
vel[i] += dt*force[i]/m
pos[i] += dt*vel[i]
gui = ti.GUI('N-body problem', (512, 512))
initialize()
while gui.running:#死循环
for i in range(substepping):
compute_force()
update()
#十六进制,2+2+2,对应8*8*8的RGB颜色值,clear,背景颜色
gui.clear(0x112F41)
#绘制圆球,代表行星。field得转成numpy才能传
gui.circles(pos.to_numpy(), color=0xffffff, radius=planet_radius)
gui.show()两个for循环的比较
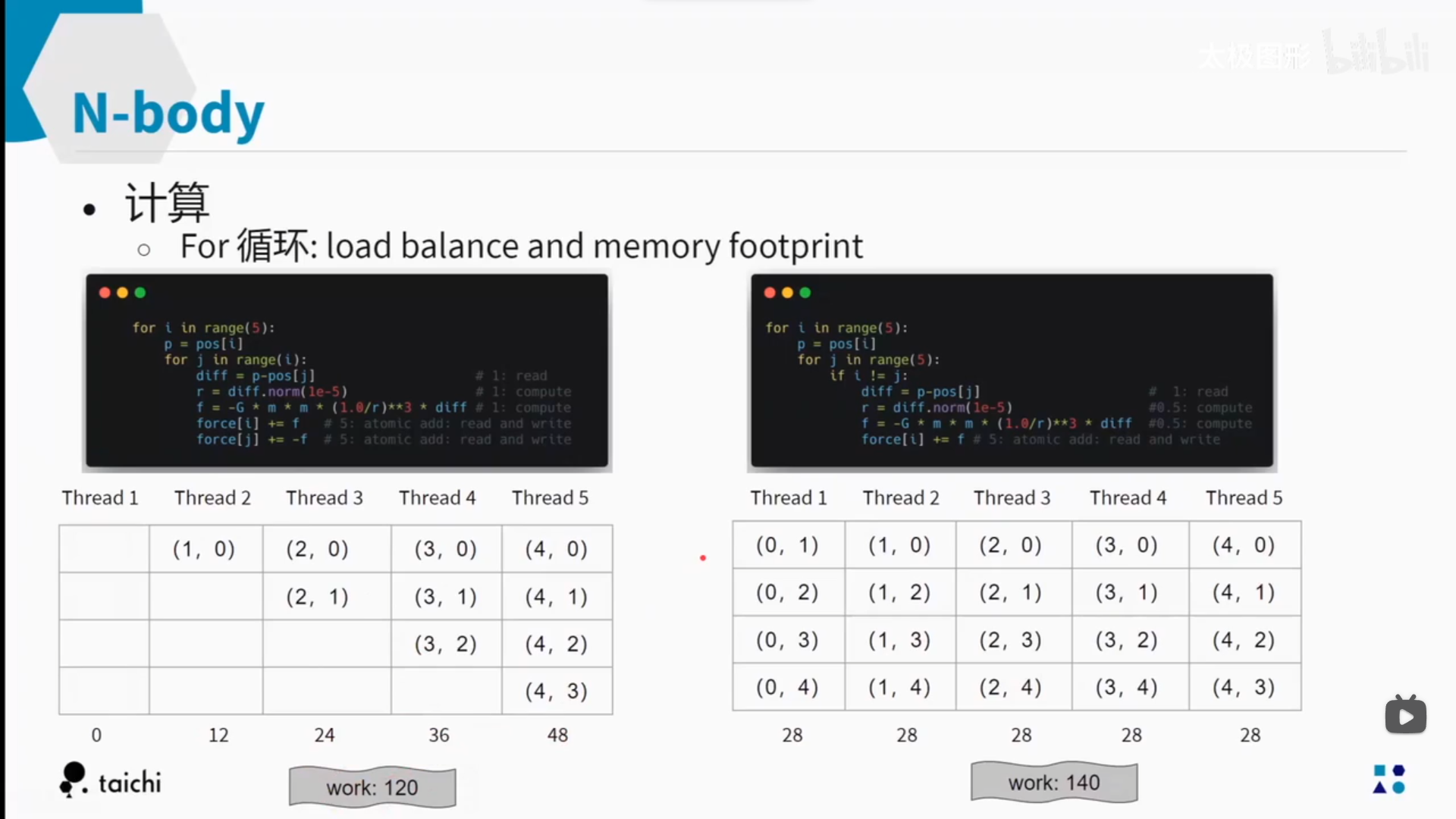
右边的那个,在GPU上比较快,因为5个并行的线程,负担是平均的。
左边的那个,在CPU上比较快,因为work数稍微小一点。
具体问题具体分析呐……
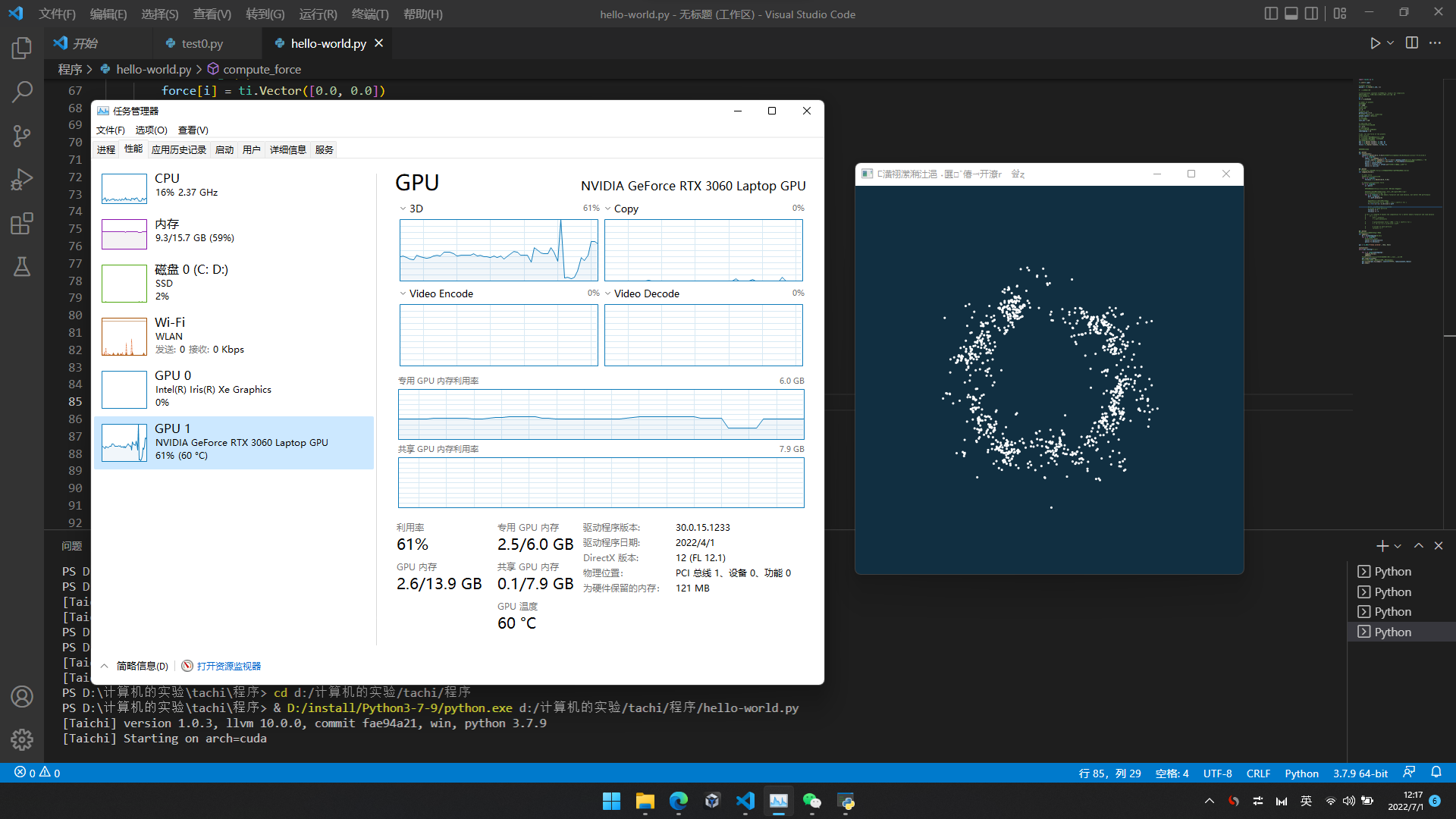
这里面一个白点,表示一个行星……若干行星在万有引力的相互作用下进行运动……高中物理……我也只会高中物理里简单的一部分。

















 1411
1411

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









