




5.1 RTDM 框架
5.1.1. RTDM的诞生背景与核心目标
自所谓的双内核硬实时 Linux 扩展(如 RTLinux、 RTAI)引入以来,已经开发了大量驱动程序。但是存在接口碎片化,平台移植成本高的问题。尽管许多这些驱动程序针对相似的硬件,但大多数驱动程序定义了私有API,应用层代码与驱动强耦合,更换硬件需重写业务逻辑。由于不存在通用 API,同一硬件(如SJA1000 CAN卡)需为Xenomai、RTAI分别开发驱动,平台移植成本高。
Real-Time Driver Model RTDM 实时驱动模型,旨在统一实时设备驱动程序和使用它们的应用程序的开发接口。
RTDM(Real-Time Driver Model)是Xenomai的一部分,用于支持实时驱动的开放与运行。它的目的就是让开发者在实时内核(Cobalt core)上编写驱动程序时,有一个统一的接口模型,而不是直接依赖Linux的内核驱动框架(例如字符设备、块设备和网络设备)。
这保证了驱动的实时性,避免因为Linux内核的调度或锁机制而引入不可预测的延迟。
独立的驱动模型(separate driver model)
- RTDM 提供了一套与Linux内核驱动模型分离的API(例如 rtdm_driver, rtdm_device)
- 驱动通过 RTDM 框架注册到 Xenomai 的实时核心中,而不是注册到 Linux 的 VFS 或设备模型。
- 应用程序可以通过
独立的注册和调用(separate registration and invocation)
- 注册(registration)
驱动作者需要用 RTDM 的 APIrtdm_dev_register()来注册设备 - 调用 (invocation)
用户空间程序通过 RTDM 设备文件调用对应的实时驱动。RTDM syscalls (/dev/rtdm/…) 来调用这些驱动,绕过 Linux 的常规路径。
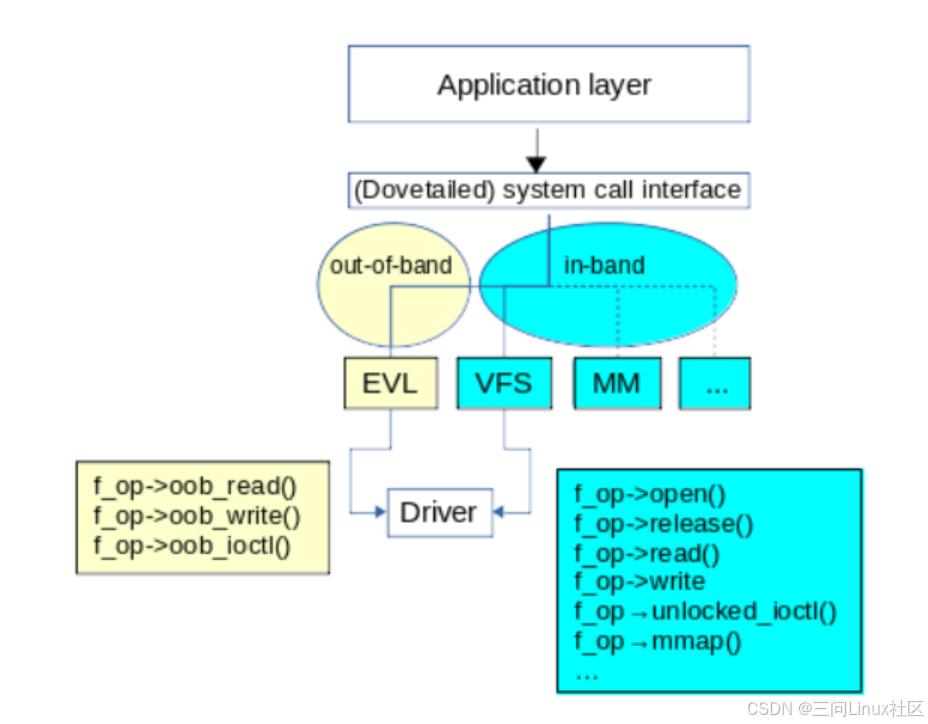
带外感知( Aware )驱动程序
Xenomai RTDM 驱动的历史和现状问题
- 很多驱动在 Linux 内核里已经存在 (如 GPIO,CAN, 串口, SPI 等),但这些驱动没有实时保证。
- Xenomai 社区要么 fork Linux 驱动, 然后改造成 RTDM 驱动,要么单独开放专用的 RTDM 驱动。这些驱动的维护要和 Linux 主线分离, 长期靠 Xenomai 社区或厂商单独维护。
针对设备,RTDM 实现了统一设备抽象层,定义两类标准化设备模型(协议设备/命名设备),覆盖90%实时场景。协议设备,支持面向消息的即通过调用 socket() 进行创建设备。命名设备,支持可用 open() 函数实例化,包括流式设备或控制类设备。为同类硬件(如UART、CAN)定义 Device Profiles 接口规范,实现应用与硬件解耦。
针对设备驱动,RTDM 实现了一个跨平台的 RTOS 服务抽象层,封装了任务调度、同步原语等共性服务,驱动仅依赖 RTDM API。RTOS 服务抽象层允许为任何实现 RTDM 的 Linux 平台开发可移植的设备驱动程序。
RTDM不仅能用于编写设备驱动,还可以用于扩展RTnet协议栈,RTIPC功能等,是对 Cobalt 内核的有效补充,它让 Cobalt 内核更加专注提供核心功能,更加简洁。
5.1.2 RTDM 层次结构
1. RTDM 的角色
应用程序一般总是通过硬件设备驱动程序,来访问硬件设备。RTDM在应用程序和驱动程序之间,充当了一个调解者的角色。
在 RTDM 和应用程序之间,RTDM 提供 high-level 上层API,遵循 POSIX 套接字和 I/O 模型,即用户层API RTDM skin。在 Xenomai3 中,RTDM skin 是 POSIX skin的别名。通过 xeno-config --skin= 获取编译与链接参数时,选项--skin=rtdm与--skin=posix严格等效。
在 RTDM 和驱动程序之间,RTDM 提供 low-level 底层API,旨在提供一个用于构建可移植驱动程序的小型 RTOS 抽象层。
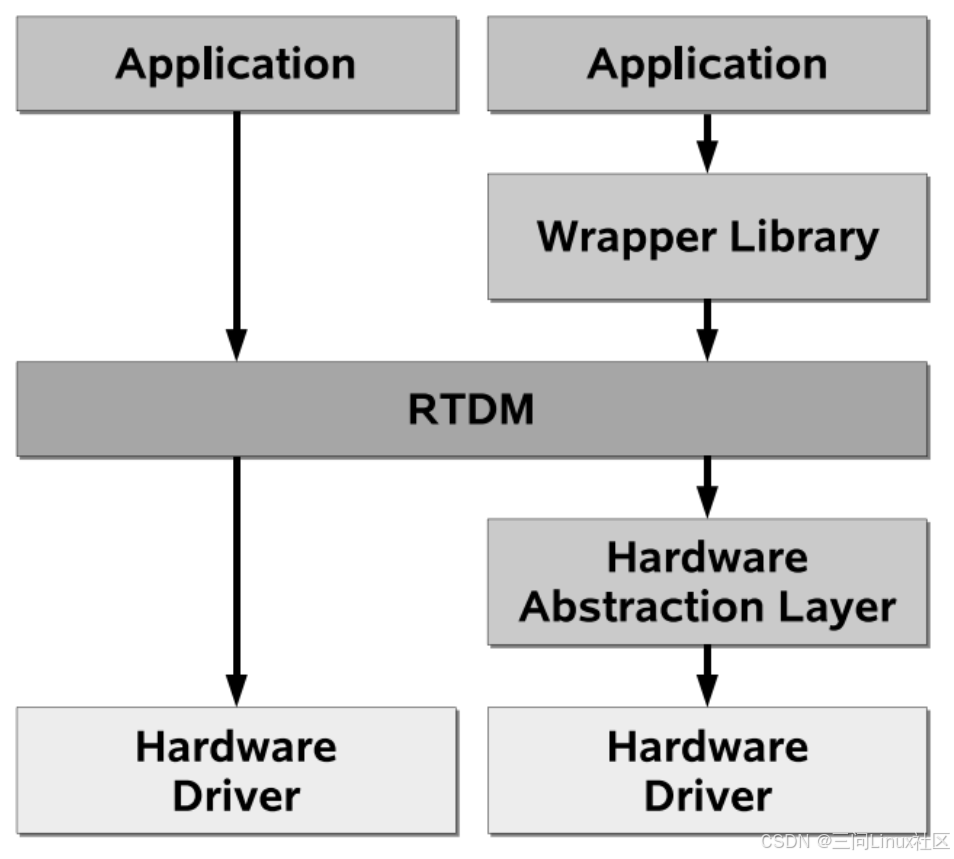
图中的 Wrapper Library 包装库和 Hardware Abstraction Layer HAL硬件抽象层,并不在 RTDM 的范围内。它们是可以根据需要添加的可选间接层,以实现进一步的抽象。
引入 Wrapper Library 包装库,可以简化相同类别的设备对上层 RTDM API 的使用。
推荐使用 HAL硬件抽象层,可以重用多个驱动程序的公共代码段,例如,附加在不同低级通信适配器驱动程序上的协议堆栈。
Xenomai的双核系统的关键就是保证head(实时域,Out-of-Band)和root(非实时域, In-Band)的连续处理,驱动也是这样。
比如,之前提到的RTDM的锁体系对 Linux-Devetail 硬自旋锁的封装链条
从最底层的硬自旋锁(hard_spinlock_t)-> 管线自旋锁(pipeline_spinlock_t)-> RTDM层的rtdm_lock_t,保证在不同上下文(IRQ/任务/管线)访问共享资源时的原子性和安全性。
驱动的处理方式:
- 双域驱动涉及
- RTDM 驱动把核心硬件操作放在 head (OOB)
- 控制、配置、调度等操作放在 root (非实时域)
- 连续处理
- IRQ 先到 head 处理,保证低延迟响应
- 再同步到 root, 保证 Linux 内核可以看到事件
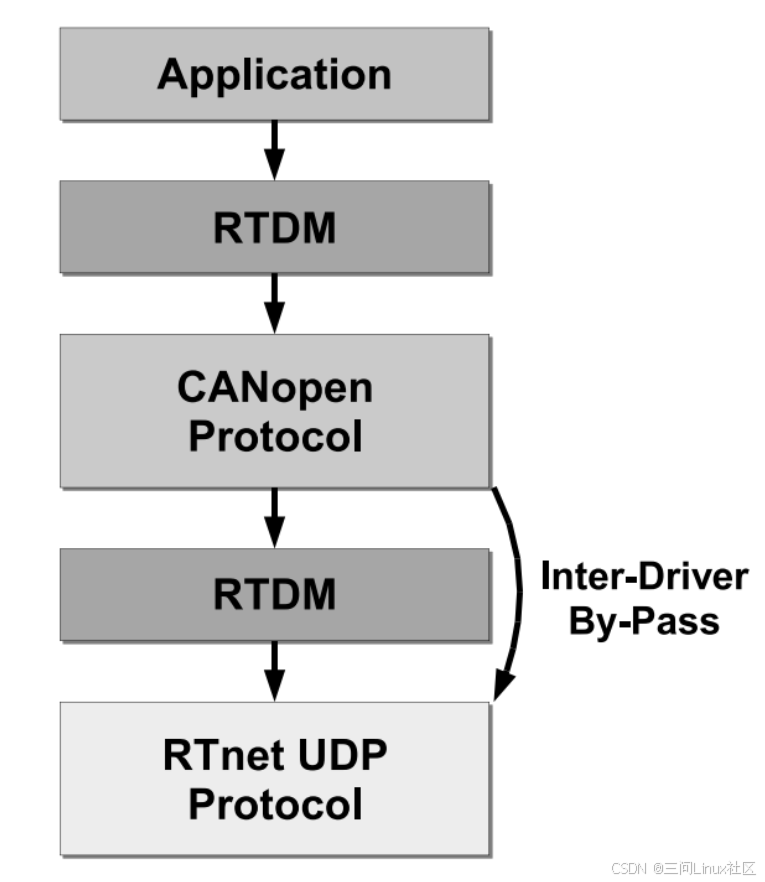
2. RTDM 堆叠
RTDM 支持并鼓励驱动程序堆叠,如下图所示,其中堆叠了 2 层 RTDM。但驱动程序开发人员仍然可以自由定义适当的其他驱动程序层。
5.1.3 RTDM 统一设备抽象层
1. 设备模型
以 LInux 的方式看待设备可区分为 3 种基本设备类型:字符模块, 块模块, 或者一个网络模块.
RTDM 支持两种不同类型的设备。它们是根据目前实时 Linux 驱动程序的特性选择的。RTDM 不包含实时块设备模型,甚至不包含文件系统模型。
-
协议设备 :所有面向消息的设备都属于这一组,类似于 Linux 中的网络模块。
- 协议设备使用两个标识符进行注册,即协议族和套接字类型。它们根据 POSIX 套接字模型进行寻址,即通过调用 socket()进行创建,通过 close()进行销毁。至少,它们必须提供对发送和接收消息的支持:sendmsg()和 recvmsg(),send()/sendto()和 recv()/recvfrom()在内部映射到这些函数。此外,协议设备的驱动程序可以通过 ioctl()处理发出的请求。
- ioctl()接口还用于将剩余的套接字调用(如 bind()、connect()、listen()、accept()、shutdown()、getsockopt()、setsockopt()、getsockname()和 getpeername())传递给驱动程序。选择这种映射是为了避免在 RTDM 层中为不常使用的函数创建大量入口点。以
bind()的代码实现为例,其内部调用了ioctl()接口。
COBALT_IMPL(int, bind, (int fd, const struct sockaddr *my_addr, socklen_t addrlen)) { struct _rtdm_setsockaddr_args args = { my_addr, addrlen }; int ret; ret = do_ioctl(fd, _RTIOC_BIND, &args); if (ret != -EADV && ret != -ENOSYS) return set_errno(ret); return __STD(bind(fd, my_addr, addrlen)); } -
命名设备 :这些设备在实时子系统下以唯一的清晰文本名称注册,然后可以通过 open()函数实例化。类似于 Linux 中的字符设备。
- RTDM 不维护特定的命名层次结构或文件系统。基本上,驱动程序在选择设备名称方面是自由的,但在设备配置文件中为常见类指定了常规的命名方案。
- 命名设备可以进一步细分为:
- 流式设备:支持流导向 I/O(read()/write())访问的设备,例如 UART 设备,SPI 设备。
- 功能设备:仅通过 ioctl()接口提供功能的设备。包括所有不符合消息和流导向模型的设备。
2. 设备规范(Device Profiles)
struct rtdm_device 和 struct rtdm_driver 结构体,是对设备和驱动的抽象,统一的结构体,可用简化设备驱动程序的实现并提高其可移植性。
struct rtdm_device 和 struct rtdm_driver 结构体成员的定义和取值,与设备自身特点息息相关。针对不同的硬件设备类型,RTDM 为结构体成员变量和成员函数预先定义了取值规范,及衍生出来的必要的数据结构和常量,统称为设备配置规范(Device Profiles)。
-
设备特性
- device_flags,设备类型
/** 如果设置,则应用程序只能请求该设备的一个实例。 */ #define RTDM_EXCLUSIVE 0x0001 /** * 使用在 rtdm_device 描述中提供的固定 minor 进行注册。 * 如果此标志不存在,则 RTDM 核心会根据注册顺序为由驱动程序管理的设备分配 minor 号。 */ #define RTDM_FIXED_MINOR 0x0002 /** 如果设置,则设备通过命名名称进行访问。 */ #define RTDM_NAMED_DEVICE 0x0010 /** 如果设置,则设备通过协议 ID 和套接字类型组合进行访问。 */ #define RTDM_PROTOCOL_DEVICE 0x0020 /** 选择设备类型的掩码。 */ #define RTDM_DEVICE_TYPE_MASK 0x00F0 /** 标志表示 RTDM 的安全变体(尚未支持) */ #define RTDM_SECURE_DEVICE 0x80000000-
profile_info
- 宏定义
RTDM_PROFILE_INFO,用于初始化profile_info信息。 - __name: 类名称,自定义。
- __id: 类主标识号,用于唯一标识该类。
#define RTDM_CLASS_PARPORT 1 #define RTDM_CLASS_SERIAL 2 #define RTDM_CLASS_CAN 3 #define RTDM_CLASS_NETWORK 4 #define RTDM_CLASS_RTMAC 5 #define RTDM_CLASS_TESTING 6 #define RTDM_CLASS_RTIPC 7 #define RTDM_CLASS_COBALT 8 #define RTDM_CLASS_UDD 9 #define RTDM_CLASS_MEMORY 10 #define RTDM_CLASS_GPIO 11 #define RTDM_CLASS_SPI 12 #define RTDM_CLASS_PWM 13 #define RTDM_CLASS_MISC 223 #define RTDM_CLASS_EXPERIMENTAL 224 #define RTDM_CLASS_MAX 255 - __subid: 类次标识号,用于进一步细分该类,一般由各驱动自行定义。
- __version: 配置版本号,用于表示该类配置的版本,一般由各驱动自行定义。
- 宏定义
-
protocol_family 协议族
- PF_CAN
- PF_INET
- PF_PACKET
- PF_RTIPC
-
socket_type 套接字类型
- SOCK_DGRAM
- SOCK_RAW
- SOCK_STREAM
-
支持的操作 :
struct rtdm_fd_ops中定义了所有可能的操作, 驱动程序按设备需求,按需选择实现哪些操作。由于在实时上下文中与非实时上下文相比,必须使用不同的同步机制和资源分配策略,因此明确区分服务调用上下文至关重要。为了让驱动程序决定如何处理不同的上下文,可以为每个入口类型安装单独的处理程序。如果处理程序是上下文无关的,则也可以为两个入口点注册相同的处理程序。- open
- socket
- close
- ioctl_rt
- ioctl_nrt
- read_rt
- read_nrt
- write_rt
- write_nrt
- recvmsg_rt
- recvmsg_nrt
- sendmsg_rt
- sendmsg_nrt
- select
- mmap
- get_unmapped_area
-
类型和常量 :为描述设备而引入的结构,IOCTL使用的选项或其他数据类型,以及在RTDM上下文中使用的任何常量。
- 设备必须提供的 IOCTL 选项。
- 通用的IOCTL选项,定义在
include/rtdm/uapi/rtdm.h中,包括_RTIOC_GETSOCKOPT,_RTIOC_SETSOCKOPT,_RTIOC_BIND, _RTIOC_CONNECT等。 - 串口相关的IOCTL选项,定义在
include/rtdm/uapi/serial.h,包括RTSER_RTIOC_GET_CONFIG,RTSER_RTIOC_SET_CONFIG,RTSER_RTIOC_GET_CONTROL等。 - CAN相关的IOCTL选项,定义在
include/rtdm/uapi/can.h,包括RTCAN_RTIOC_TAKE_TIMESTAMP,RTCAN_RTIOC_RCV_TIMEOUT,RTCAN_RTIOC_SND_TIMEOUT等。 - GPIO相关的IOCTL选项,定义在
include/rtdm/uapi/gpio.h,包括GPIO_RTIOC_DIR_OUT,GPIO_RTIOC_DIR_IN,GPIO_RTIOC_IRQEN等。 - 未其它设备及驱动定义的IOCTL选项,不再一一列举。
- 通用的IOCTL选项,定义在
- 其它数据类型和宏定义等,一般定义在
include/rtdm/uapi/rtdm.h,include/rtdm/uapi/serial.h,include/rtdm/uapi/can.h等头文件中。
- 设备必须提供的 IOCTL 选项。
3. 设备注册和调用
通过将 struct rtdm_device *dev 设备描述传递给 rtdm_dev_register()来注册 RTDM 设备。
- 注册命名设备
static struct rtdm_driver foo_driver = {
.profile_info = RTDM_PROFILE_INFO(foo,
RTDM_CLASS_EXPERIMENTAL,
RTDM_SUBCLASS_FOO,
42),
.device_flags = RTDM_NAMED_DEVICE|RTDM_EXCLUSIVE,
.device_count = 2,
.context_size = sizeof(struct foo_context),
.ops = {
.open = foo_open,
.ioctl_rt = foo_ioctl_rt,
.ioctl_nrt = foo_ioctl_nrt,
.close = foo_close,
},
};
static struct rtdm_device foo_devices[2] = {
[ 0 ... 1 ] = {
.driver = &foo_driver,
.label = "foo%d",
},
};
MODULE_VERSION("1.0.0");
MODULE_DESCRIPTION("Ultra-void IV board driver");
MODULE_AUTHOR'"Whoever");
foo_devices[0].device_data = &some_driver_data0;
ret = rtdm_dev_register(&foo_devices[0]);
...
foo_devices[1].device_data = &some_driver_data1;
ret = rtdm_dev_register(&foo_devices[1]);
这段代码演示了如何基于基于RTDM(Real-Time Device Model)框架,定义和注册一个命名设备的实时设备驱动程序。
首先定义了一个名为 foo_driver 的静态结构体,用于描述驱动程序的基本信息和操作接口。具体来说:
- profile_info字段包含了驱动程序的配置信息,如驱动名称、类别、子类别和版本号。
- device_flags字段设置了设备的标志,这里表明设备是命名设备并且是独占的。
- device_count字段指定了将由该驱动程序控制的设备数量,在这里为2。
- context_size字段定义了设备上下文的大小,即每个设备的内存需求,这里使用sizeof(struct foo_context)来获取foo_context结构体的大小。
- ops字段是一个指向结构体的指针,该结构体定义了设备的操作函数,如打开(foo_open)、实时IO控制(foo_ioctl_rt)、非实时IO控制(foo_ioctl_nrt)和关闭(foo_close)。
接下来,定义了一个包含两个设备的静态数组foo_devices,每个设备都关联到上面定义的foo_driver驱动程序,并且其标签被设置为foo%d,这里的%d是一个占位符,实际使用时会被设备的具体编号(0或1)替换。
最后,将两个设备的数据指针分别指向不同的驱动数据结构 some_driver_data0 和 some_driver_data1 ,然后通过 rtdm_dev_register 函数注册这两个设备。
应用程序可以通过以下两种方式打开设备。
推荐的使用方式,Xenomai 应用程序使用实际的设备节点路径来打开RTDM设备。例如:
fd = open("/dev/rtdm/devname", ...);
这种方法不仅符合最新的命名规范,还能避免潜在的兼容性问题和警告信息。
在Xenomai 2.x中, RTDM 设备节点使用的是旧的命名规则,到了 Xenomai 3,RTDM 框架改造后,设备节点的路径和命名方式也有了变化。这意味着,老应用程序如果直接移植到Xenomai 3上,可能会找不到原有的设备节点路径,导致open()失败。
XENO_OPT_RTDM_COMPAT_DEVNODE 是一个布尔类型的配置选项,位于 drivers 菜单下。其默认值为 y,表示启用。该选项允许应用程序在打开RTDM设备时使用旧的命名方案,这样就保证了向后兼容,减少应用移植工作量。
fd = open("devname", ...);fd = open("/dev/devname", ...);
当应用程序使用上述旧命名方案打开RTDM设备时,如果内核配置中启用 XENO_OPT_DEBUG_LEGACY,Xenomai 会在内核日志中发出警告信息。
- 注册协议设备
static struct rtdm_driver foo_driver = {
.profile_info = RTDM_PROFILE_INFO(foo,
RTDM_CLASS_EXPERIMENTAL,
RTDM_SUBCLASS_FOO,
1),
.device_flags = RTDM_PROTOCOL_DEVICE,
.device_count = 1,
.context_size = sizeof(struct foo_context),
.protocol_family = PF_FOO,
.socket_type = SOCK_DGRAM,
.ops = {
.socket = foo_socket,
.close = foo_close,
.recvmsg_rt = foo_recvmsg,
.sendmsg_rt = foo_sendmsg,
.ioctl_rt = foo_ioctl,
.ioctl_nrt = foo_ioctl,
.read_rt = foo_read,
.write_rt = foo_write,
.select = foo_select,
},
};
static struct rtdm_device foo_device = {
.driver = &foo_driver,
.label = "foo",
.device_data = &some_driver_data,
};
ret = rtdm_dev_register(&foo_device);
...
MODULE_VERSION("1.0.0");
MODULE_DESCRIPTION("Unexpected protocol driver");
MODULE_AUTHOR'"Whoever");
这段代码演示了如何基于基于RTDM(Real-Time Device Model)框架,定义和注册一个协议设备的实时设备驱动程序。
首先定义了一个名为 foo_driver 的静态结构体,用于描述驱动程序的基本信息和操作接口。具体来说:
- profile_info: 描述了驱动程序的基本信息,包括驱动名称(foo)、类别(实验性的RTDM_CLASS_EXPERIMENTAL)、子类别(RTDM_SUBCLASS_FOO)和版本号(1)。
- device_flags: 设备标志,表示设备是一个协议设备(RTDM_PROTOCOL_DEVICE)。
- device_count: 指定该驱动程序控制的设备数量为1。
- context_size: 设备上下文的大小,使用sizeof(struct foo_context)来确定。
- protocol_family: 协议族,这里为PF_FOO,表示使用自定义的协议族。
- socket_type: 套接字类型,这里是SOCK_DGRAM,表示数据报套接字。
- ops: 定义了设备的操作函数,包括创建套接字(foo_socket)、关闭设备(foo_close)、实时接收消息(foo_recvmsg)、实时发送消息(foo_sendmsg)、实时IO控制(foo_ioctl_rt)、非实时IO控制(foo_ioctl_nrt)、实时读取(foo_read)、实时写入(foo_write)和选择(foo_select)。
接下来,定义了一个 foo_device 设备,关联到 foo_driver 驱动程序,并且其标签被设置为 foo 。其中,device_data 代表设备数据指针,指向 some_driver_data 结构体。
最后,调用 rtdm_dev_register(&foo_device) 将设备注册到RTDM框架中。
在应用程序中,可直接调用 socket 相关接口使用 RTDM 设备。例如,初始化一个 socket 实例:
txsock = socket(PF_CAN, SOCK_RAW, 0)
具体实例,可以参考 demo/posix/cobalt/can-rtt.c。
5.1.4 RTDM RTOS 服务抽象层
为了提高驱动程序的可移植性,RTDM 提供了一个与底层系统无关的通用 API,涵盖基本的 RTOS 服务。该 API 旨在仅提供典型实时驱动程序所需的最小服务集。这有助于保持 RTDM 层的小巧性,并且还提高了其在其他实时 Linux 变体上的可移植性。以下服务组可用:
- 驱动内联服务 :提供驱动之间可相互调用的接口。
- 时钟服务 :提供接口用于获取系统时钟或单调时钟,都是以 64 位值表示,单位为纳秒。
- 任务服务 :此组函数允许驱动程序创建自己的实时任务,挂起用户和驱动程序任务的执行,或操作它们的特性(优先级和周期性)。
- 定时器服务 :提供定时器服务。
- 同步服务 :RTDM 提供各种基本同步服务。首先,自旋锁可用于保护小的临界路径,无论它们是否位于中断处理程序中或在非实时上下文中运行。经典的互斥锁和信号量也可用于同步实时任务。同时支持事件机制,可作为信号量的替代方案。
- 中断管理服务 :对于大多数硬件驱动程序,中断是必不可少的服务。可以使用 RTDM 注册实时中断线的处理程序,并且可以明确启用和禁用这些中断线。
- 非实时信号服务 :为了将事件从实时域传播到非实时域,可以从 RTDM 层请求特殊的信号服务。从任何上下文触发此类信号都是安全的。一旦没有更多时间关键任务待处理,注册的处理程序将在非实时上下文中执行。
- 实用工具服务 :此组服务包括实时内存分配、对用户空间内存区域的安全访问、实时安全的内核控制台输出,以及检查当前上下文是否为实时任务等待。
在后续的章节,会详细介绍上述各种服务。
5.1.5 在 Xenomai3 中集成的RTDM驱动
xenomai-v3.2.4/kernel/drivers/ 目录下列出了 Xenomai3 支持的驱动程序,以下是这些子目录及其包含的驱动程序的简要介绍:
- autotune,包含自动调优驱动程序,用于优化实时系统的性能和配置。
- serial,包含串行通信驱动程序,支持 UART(通用异步收发传输器)等串行接口设备。
- can,包含 CAN(Controller Area Network)总线驱动程序,用于支持 CAN 网络接口设备。
- net,包含网络驱动程序,支持以太网控制器等网络接口设备,用于实时网络通信。
- analogy,包含模拟输入和输出驱动程序,支持 ADC(模数转换器)和 DAC(数模转换器)等模拟接口设备。
- ipc,包含进程间通信(IPC)驱动程序,支持实时环境下的消息传递、共享内存等通信机制。
- udd,包含用户设备驱动(UDD)驱动程序,允许用户空间程序通过 RTDM 接口与设备进行交互。
- gpio,包含通用输入输出(GPIO)驱动程序,支持硬件上的输入输出引脚。
- gpiopwm,包含基于 GPIO 的 PWM(脉宽调制)驱动程序,利用 GPIO 引脚实现 PWM 功能。
- spi,包含 SPI(串行外设接口)总线驱动程序,用于支持 SPI 接口设备。
分别重点介绍串行设备和RTnet,它们分别是命名设备和协议设备的典型代表。
1. 串行设备
通过 read/write 提供对串行设备的访问,是一种命名设备。定义了 IOCTL 以操作输出状态线、获取输入线、等待设备事件,以及配置串行设备的线路特性、超时和事件。
已经支持的串行设备驱动,包括:
- 16550A UART
- MPC52xx UART
- IMX UART
以16550A UART驱动为例:
static struct rtdm_driver uart16550A_driver = {
.profile_info = RTDM_PROFILE_INFO(uart16550A,
RTDM_CLASS_SERIAL,
RTDM_SUBCLASS_16550A,
RTSER_PROFILE_VER),
.device_flags = RTDM_NAMED_DEVICE | RTDM_EXCLUSIVE,
.device_count = MAX_DEVICES,
.context_size = sizeof(struct rt_16550_context),
.ops = {
.open = rt_16550_open,
.close = rt_16550_close,
.ioctl_rt = rt_16550_ioctl,
.ioctl_nrt = rt_16550_ioctl,
.read_rt = rt_16550_read,
.write_rt = rt_16550_write,
},
};
int __init rt_16550_init(void)
{
struct rtdm_device *dev;
...snips...
dev = kmalloc(sizeof(struct rtdm_device) +
RTDM_MAX_DEVNAME_LEN, GFP_KERNEL);
err = -ENOMEM;
if (!dev)
goto cleanup_out;
dev->driver = &uart16550A_driver;
dev->label = "rtser%d";
...snips...
err = rtdm_dev_register(dev);
...snips...
}
上述代码定义了一个名为 uart16550A_driver 的 RTDM 驱动程序,用于支持 16550A UART 串行通信设备。该驱动程序的配置信息通过 RTDM_PROFILE_INFO 宏初始化,设置了类名称、主标识号、次标识号和版本号。驱动的设备标志包括 RTDM_NAMED_DEVICE 和 RTDM_EXCLUSIVE,表示设备可以通过名称访问且为独占设备。驱动的最大设备数量为 MAX_DEVICES,上下文大小为 sizeof(struct rt_16550_context)。
驱动程序的操作函数包括 open、close、ioctl_rt、ioctl_nrt、read_rt 和 write_rt,分别用于设备的打开、关闭、控制、读取和写入操作。
在 rt_16550_init 函数中,初始化过程中动态分配了一个 rtdm_device 结构体,并将其与 uart16550A_driver 关联。设备的标签设置为 “rtser%d”,然后通过 rtdm_dev_register 函数注册设备。如果设备注册失败,会进行相应的错误处理和清理操作。
2. RTnet 实时网络
RTnet 实时网络分为 2 大部分:实时网络协议堆栈 和 实时网络设备。
实时网络协议堆栈,定义在 kernel/drivers/net/stack/ 目录,由不同的 RTDM 设备组成,及相关的数据结构和IOCTL定义等组成。
当前支持的协议栈包括:
- 协议设备:实时 UDP
- 协议设备:实时 TCP
- 协议设备:实时 Packet
以 UDP 实时协议栈 kernel/drivers/net/stack/ipv4/udp 为例:
static struct rtdm_driver udp_driver = {
.profile_info = RTDM_PROFILE_INFO(udp,
RTDM_CLASS_NETWORK,
RTDM_SUBCLASS_RTNET,
RTNET_RTDM_VER),
.device_flags = RTDM_PROTOCOL_DEVICE,
.device_count = 1,
.context_size = sizeof(struct rtsocket),
.protocol_family = PF_INET,
.socket_type = SOCK_DGRAM,
/* default is UDP */
.ops = {
.socket = rt_inet_socket,
.close = rt_udp_close,
.ioctl_rt = rt_udp_ioctl,
.ioctl_nrt = rt_udp_ioctl,
.recvmsg_rt = rt_udp_recvmsg,
.sendmsg_rt = rt_udp_sendmsg,
.select = rt_socket_select_bind,
},
};
static struct rtdm_device udp_device = {
.driver = &udp_driver,
.label = "udp",
};
static int __init rt_udp_init(void)
{
...snips...
err = rtdm_dev_register(&udp_device);
...snips...
}
上述代码首先定义了一个名为 udp_driver 的 RTDM(Real-Time Device Model)驱动程序,用于支持实时环境下的 UDP 网络通信。该驱动程序的配置信息通过 RTDM_PROFILE_INFO 宏初始化,设置了类名称为 udp,主标识号为 RTDM_CLASS_NETWORK,次标识号为 RTDM_SUBCLASS_RTNET,版本号为 RTNET_RTDM_VER。
驱动的设备标志为 RTDM_PROTOCOL_DEVICE,表示设备通过协议 ID 和套接字类型进行访问。设备数量为 1,上下文大小为 sizeof(struct rtsocket)。
驱动程序的操作函数包括:
- socket: 使用 rt_inet_socket 创建套接字。
- close: 使用 rt_udp_close 关闭套接字。
- ioctl_rt 和 ioctl_nrt: 使用 rt_udp_ioctl 进行实时和非实时的控制操作。
- recvmsg_rt: 使用 rt_udp_recvmsg 接收数据报。
- sendmsg_rt: 使用 rt_udp_sendmsg 发送数据报。
- select: 使用 rt_socket_select_bind 进行选择操作。
此外,还定义了一个 rtdm_device 结构体 udp_device,并将其与 udp_driver 关联,设备标签设置为 “udp”。
在 rt_udp_init 函数中,初始化过程中注册了 udp_device,使其在实时环境中可用。
实时网络设备,定义在 kernel/drivers/net/drivers/ 目录。用 struct rtnet_device 结构体来定义实时网络设备,由 rt_register_rtnetdev 向实时网络协议堆栈注册网络接口,并调用 RTDM RTOS抽象层 完成相关驱动工作。
当前支持的实时网络设备如下:
- Intel e1000,e1000e,igb,eepro100等
- Freescale fec,mpc52xx_fec,mpc8260_fcc_enet,mpc8xx_enet,mpc8xx_fec等
- RTL r8169,8139too等
- Cadence MACB/GEM等
- 其它网口如loopback,tulip,natsemi,via-rhine,at91_ether等等。
5.1.6 RTDM 驱动的设计哲学
5.1.6.1 RTDM 的设计定位:实时优先,而非硬件发现
RTDM 的设计目标是为实时驱动程序提供一个统一的接口模型,而不是一个通用的硬件抽象层(HAL)。RTDM 关注的是驱动程序的实时性和可移植性,而不是硬件发现和管理。


















 5550
5550

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









