




 本文详细介绍了如何使用Eclipse IDE和ESP-IDF框架,对ESP32S2芯片进行配置,以通过I2C总线测试并驱动MPU6050陀螺仪。首先创建基于I2C的软件工程,然后编译、配置I2C端口,最后成功读取到MPU6050的ID信息,验证了硬件及驱动的正确性,为后续软件调试打下基础。
本文详细介绍了如何使用Eclipse IDE和ESP-IDF框架,对ESP32S2芯片进行配置,以通过I2C总线测试并驱动MPU6050陀螺仪。首先创建基于I2C的软件工程,然后编译、配置I2C端口,最后成功读取到MPU6050的ID信息,验证了硬件及驱动的正确性,为后续软件调试打下基础。
1、摘要
一款新的控制板卡在第一次使用时,都需要进行硬件功能的测试,以确保所有的硬件都能够正常工作后,才可以进入后续的软件编程阶段,ESP-Drone四旋翼无人机的控制板使用了mpu6050陀螺仪芯片作为惯性导航的传感器芯片,其可以用来测量无人机X、Y、Z方向的偏转角度和加速度信息,从而确定无人机的姿态,从而为控制系统提供控制无人机飞行的决策数据,mpu6050使用I2C总线与主控芯片进行通信,因此首先要做的工作就是测试主控芯片是否能够通过I2C总线来读取mpu6050芯片中的数据。
2、I2C总线测试过程记录
第1步,启动Eclipse集成编程环境。
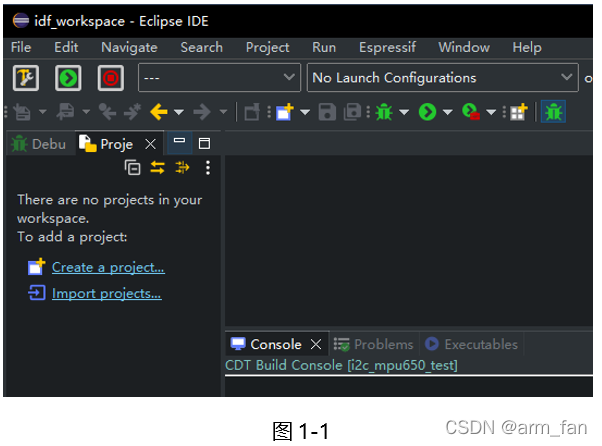
第2步,基于ESP-IDF模版创建一个基于I2C的软件工程。
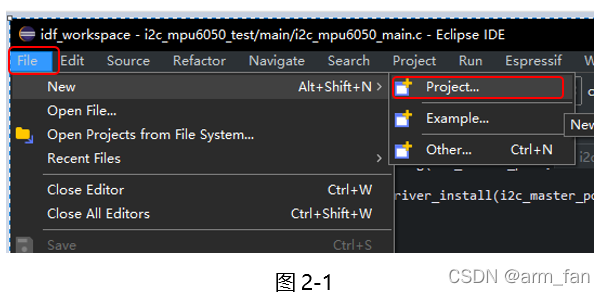
如图2-1所示,点击”File->Project”菜单进入软件工程创建界面。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1352
1352

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









