




基于模型预测控制(mpc)的车辆换道,车辆轨迹跟踪,换道轨迹为五次多项式,matlab与carsim联防控制
YID:1550680497837661
资料来源于
https://www.liruan.net/1864.html
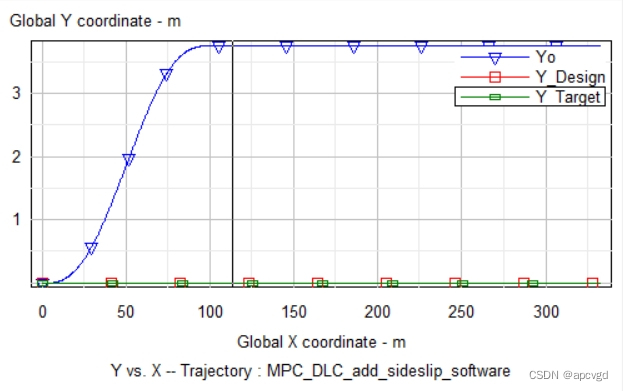
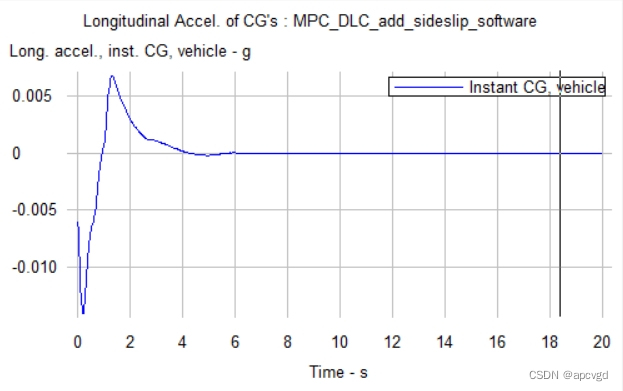
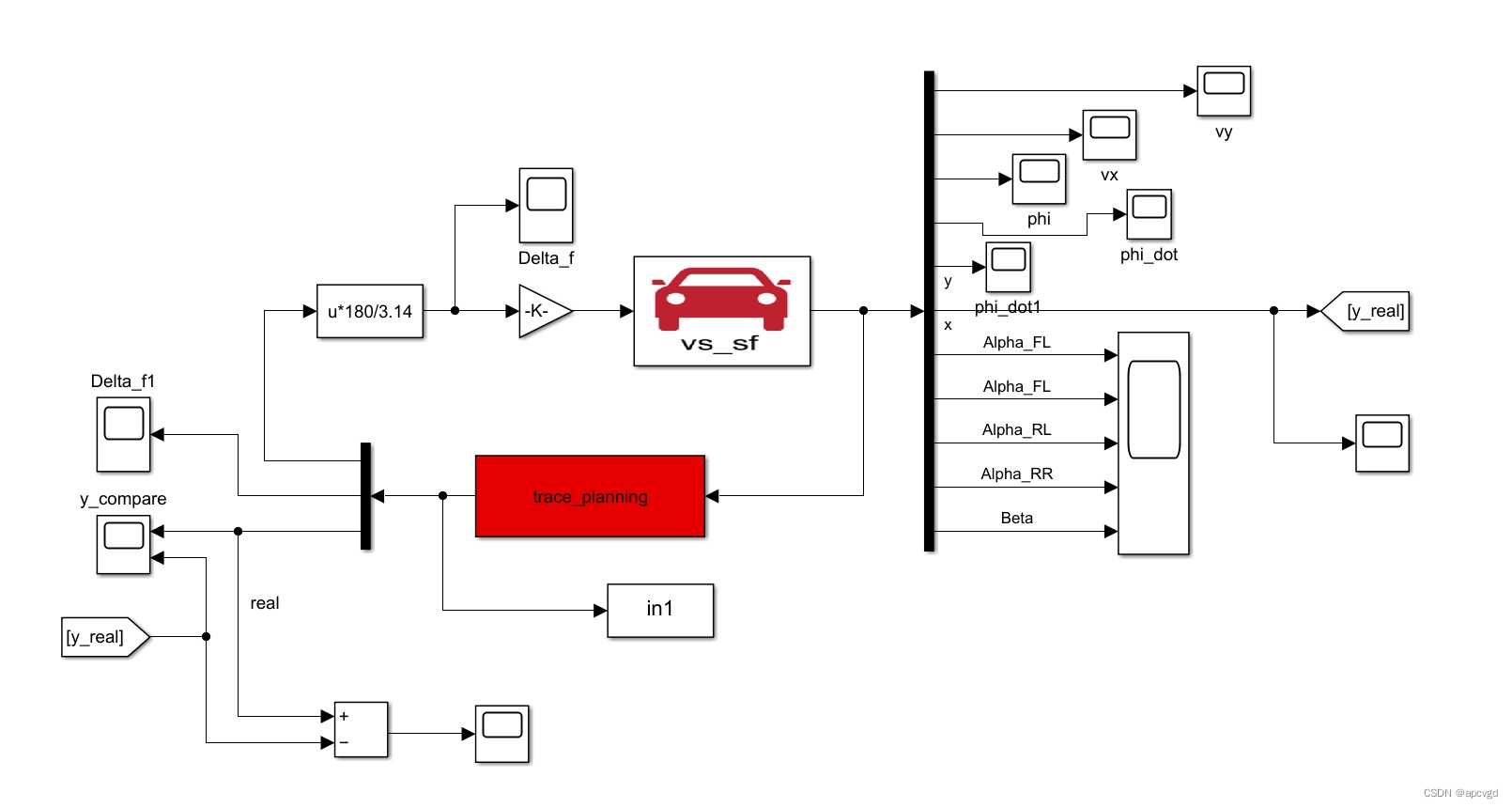
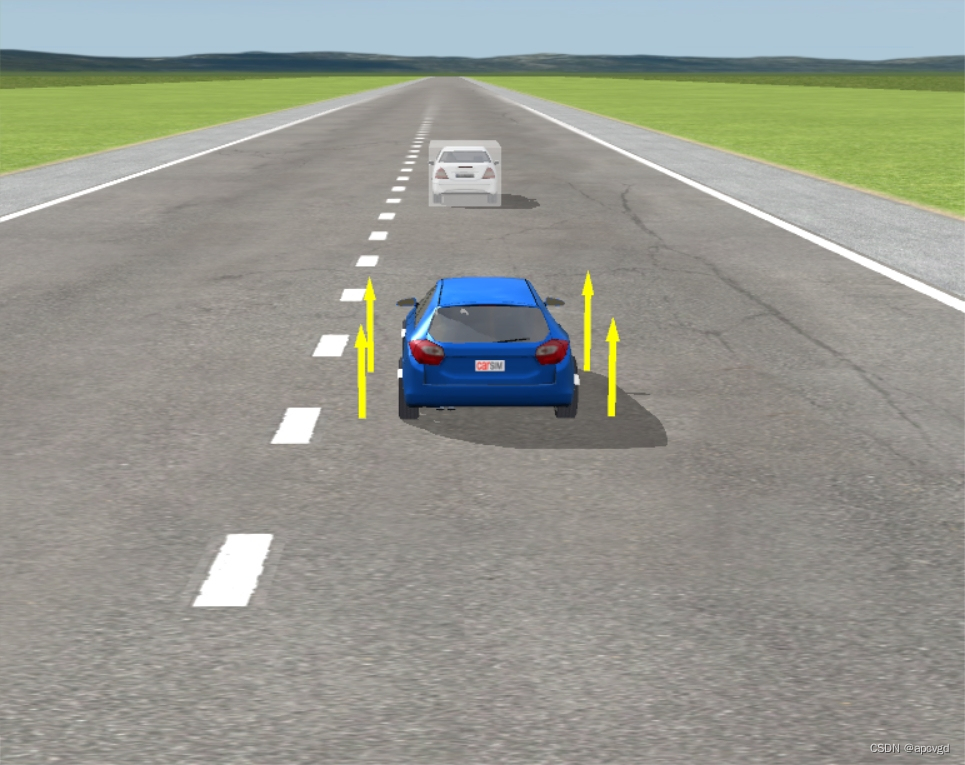
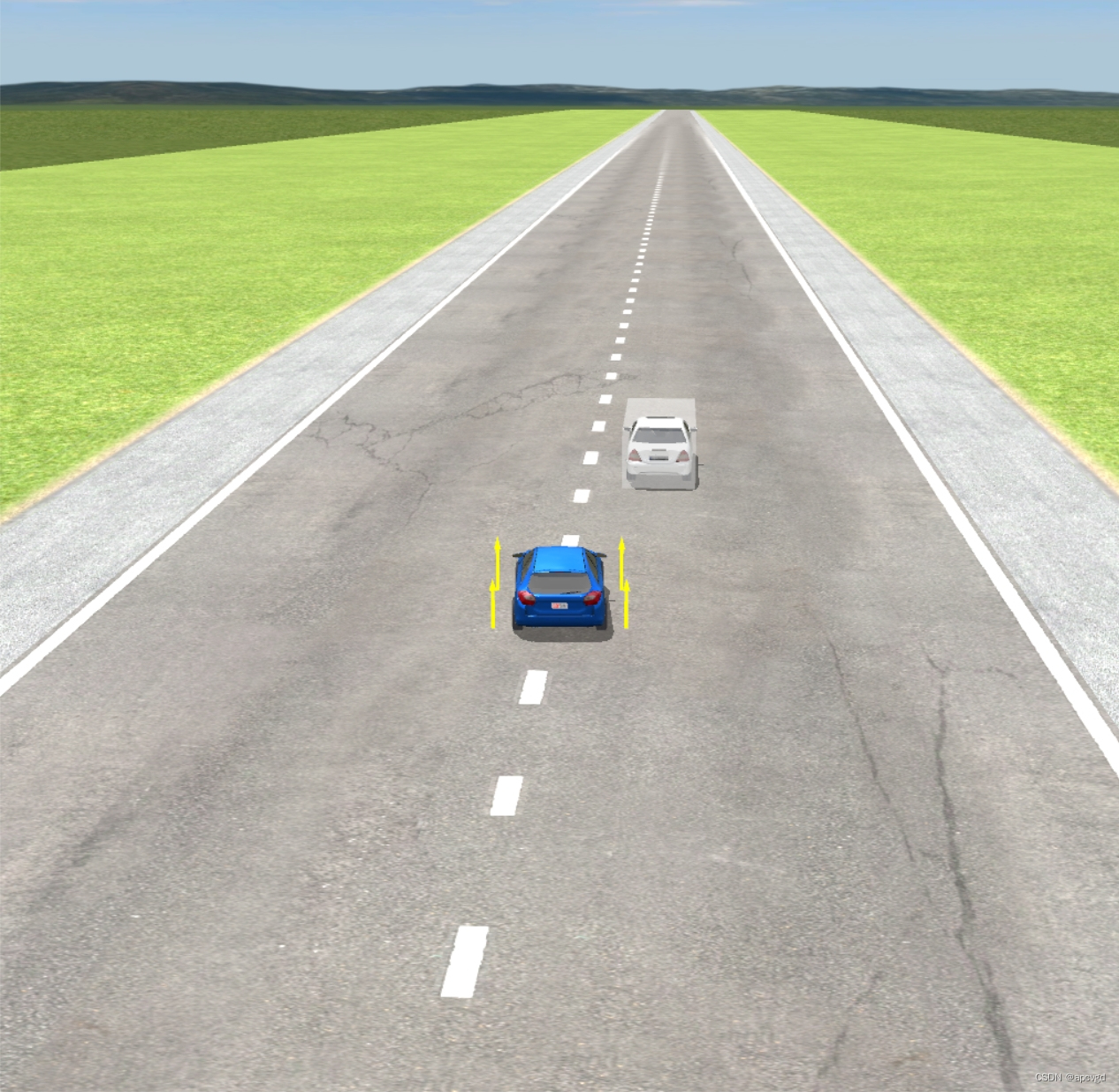
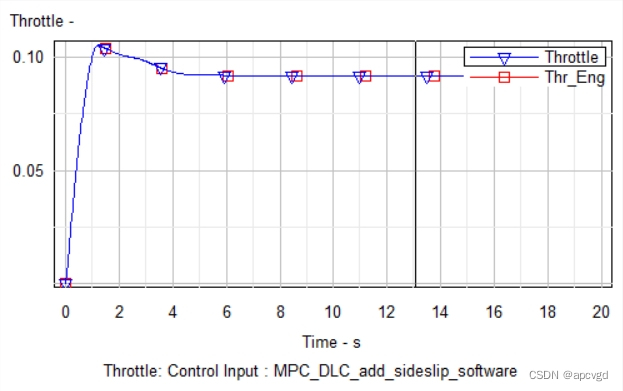
 本文探讨了基于模型预测控制(MPC)的车辆换道与轨迹跟踪,采用五次多项式模型描述车辆动态,利用Matlab与Carsim联合仿真验证控制效果,展示MPC在自动驾驶安全性和驾驶体验提升上的潜力。
本文探讨了基于模型预测控制(MPC)的车辆换道与轨迹跟踪,采用五次多项式模型描述车辆动态,利用Matlab与Carsim联合仿真验证控制效果,展示MPC在自动驾驶安全性和驾驶体验提升上的潜力。
基于模型预测控制(mpc)的车辆换道,车辆轨迹跟踪,换道轨迹为五次多项式,matlab与carsim联防控制
YID:1550680497837661
资料来源于
https://www.liruan.net/1864.html
 9416
9416

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























