




想象这样一个场景:你正在设计一个智能系统,其中多智能体协作、状态流转、工具调用、生成应用、交互原型,这可不仅仅是一则“聊天机器人”,而是一个完整的“智能工作流平台”。而现在行业中出现了三种新范式/工具:OpenAI Swarm、Claude Artifacts、LangGraph。它们分别来自三条不同路径,但都在问一个问题 —— 我们如何用大模型与智能体构建下一代应用?
今天我邀请你和我一起,走进这三条路径:我们一起看看它们是什么、为什么出现、怎么用、各自优缺点是什么。看完之后,你可以判断:在你自己的项目里,哪一种路径更适合,或者如何混合使用。
一、三条路径简介
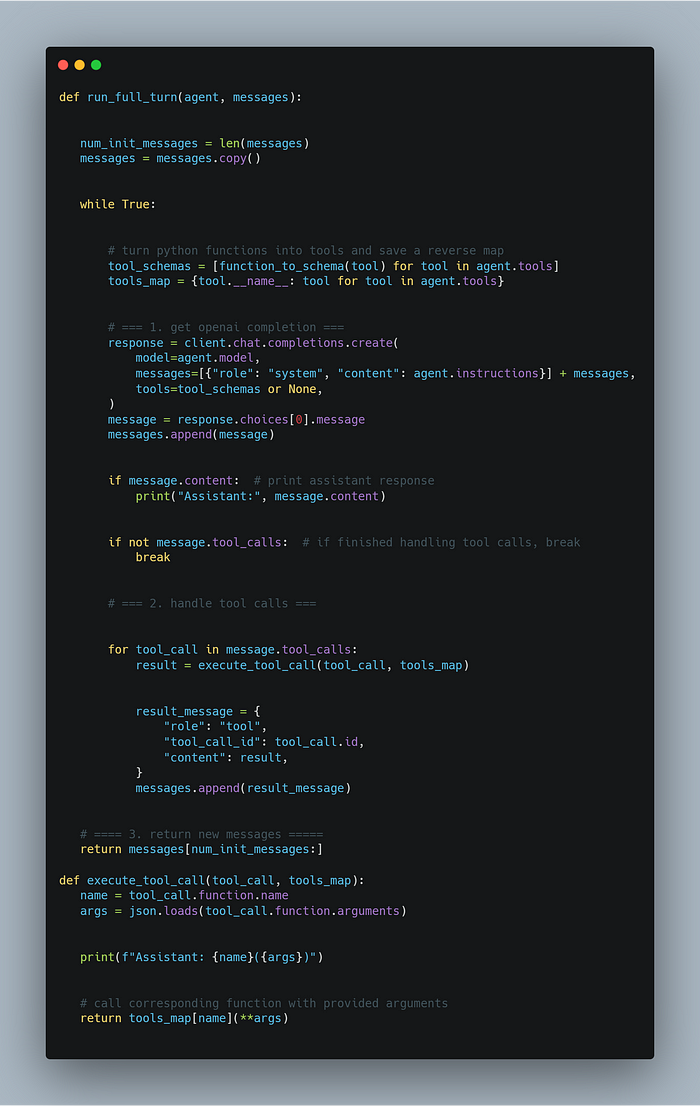
1. OpenAI Swarm

-
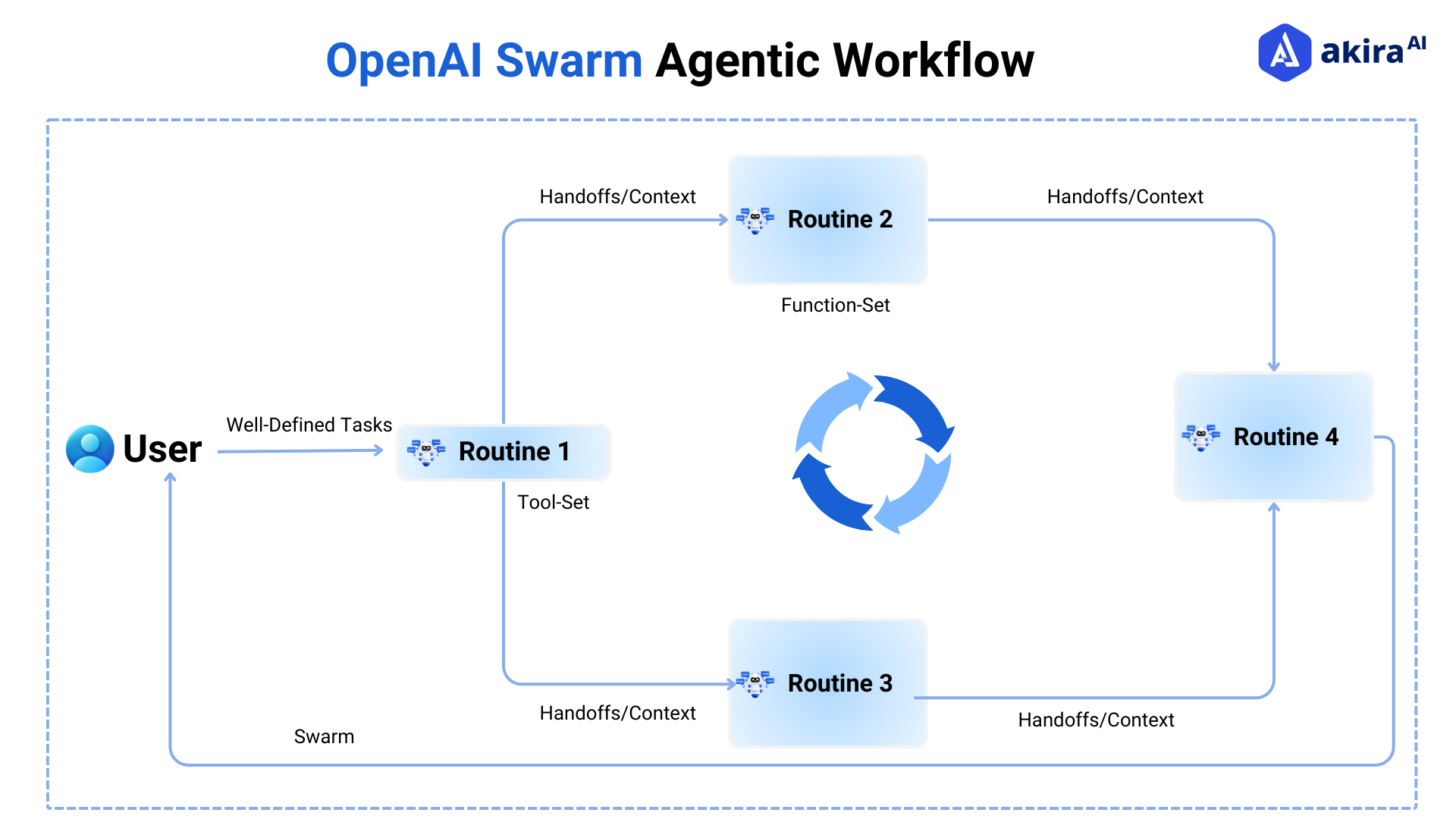
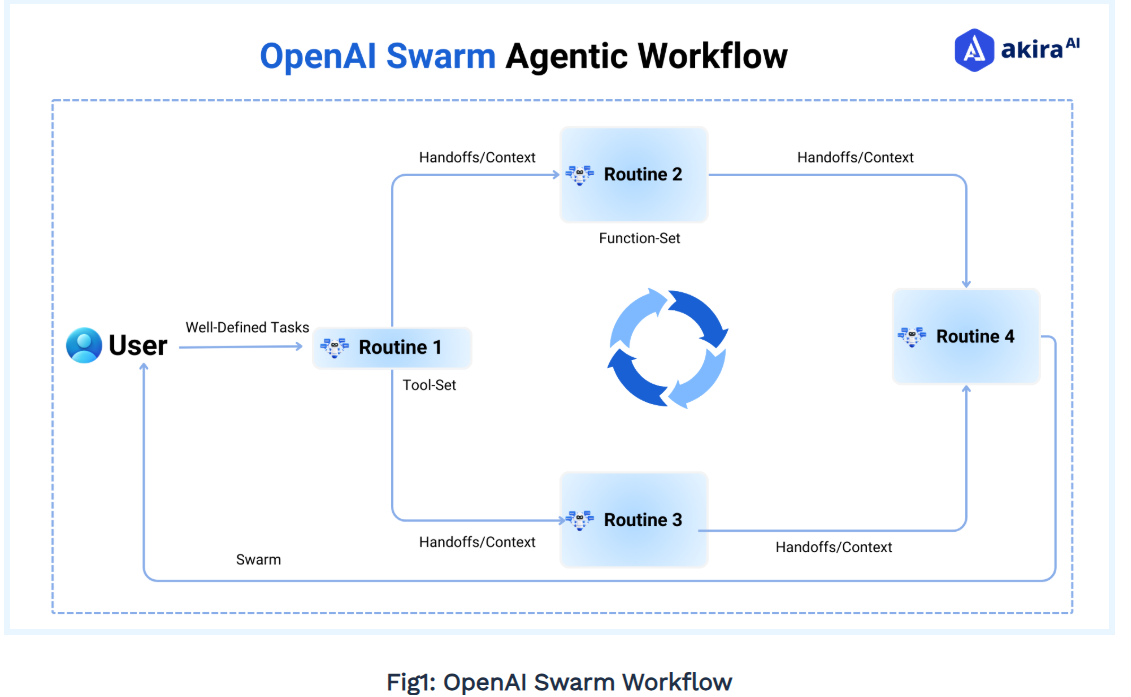
来自 OpenAI 的开源/实验型框架,名为 Swarm。其 github 页面指出:这是一个 “实验性的、教育用的”框架,用于构建多智能体协作系统。(GitHub)
-
核心抽象:
Agent+handoffs。每个 Agent 有 instructions + functions;可以将对话或任务“移交”给另一个 Agent。(Medium) -
其定位并非“企业级全功能生产平台”,而更像 “学习 & 快速原型” 的入口。(Composio)
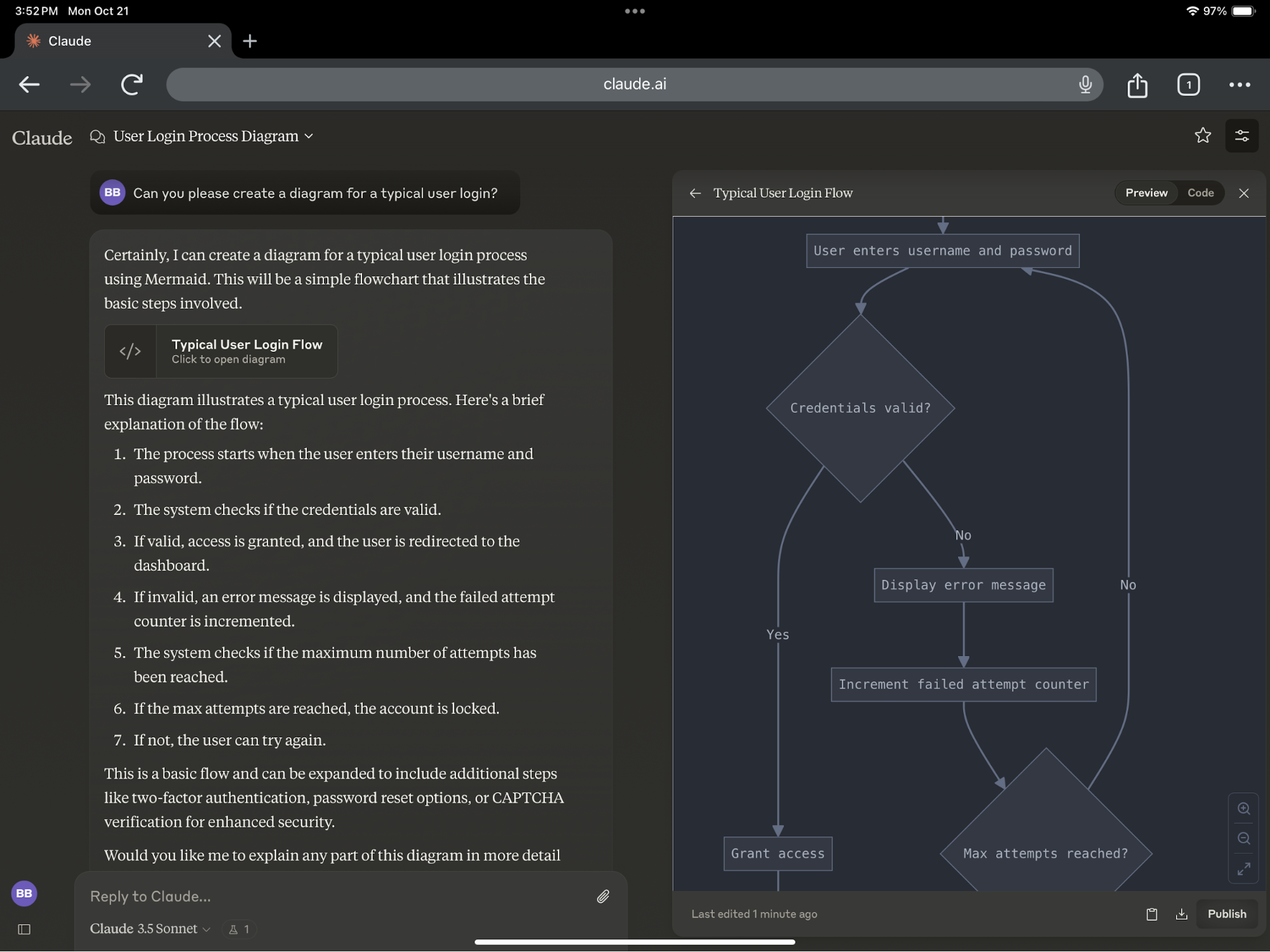
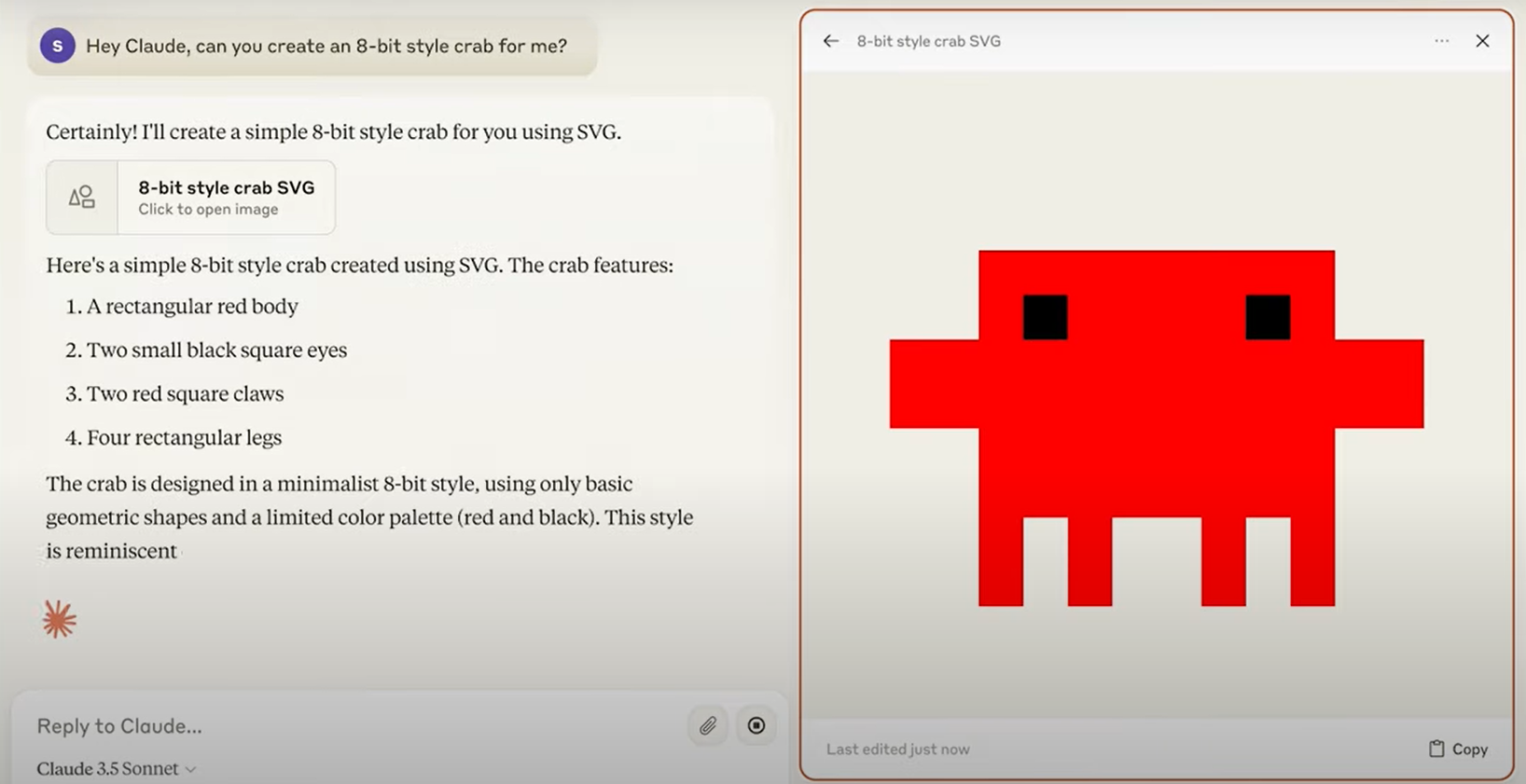
2. Claude Artifacts
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 856
856

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









