



使用源码或者apt可以安装更多的功能包,使用各式各样的传感器和驱动器去组合自己的机器人。
镜像自带usb_cam可以打开笔记本电脑的摄像头。
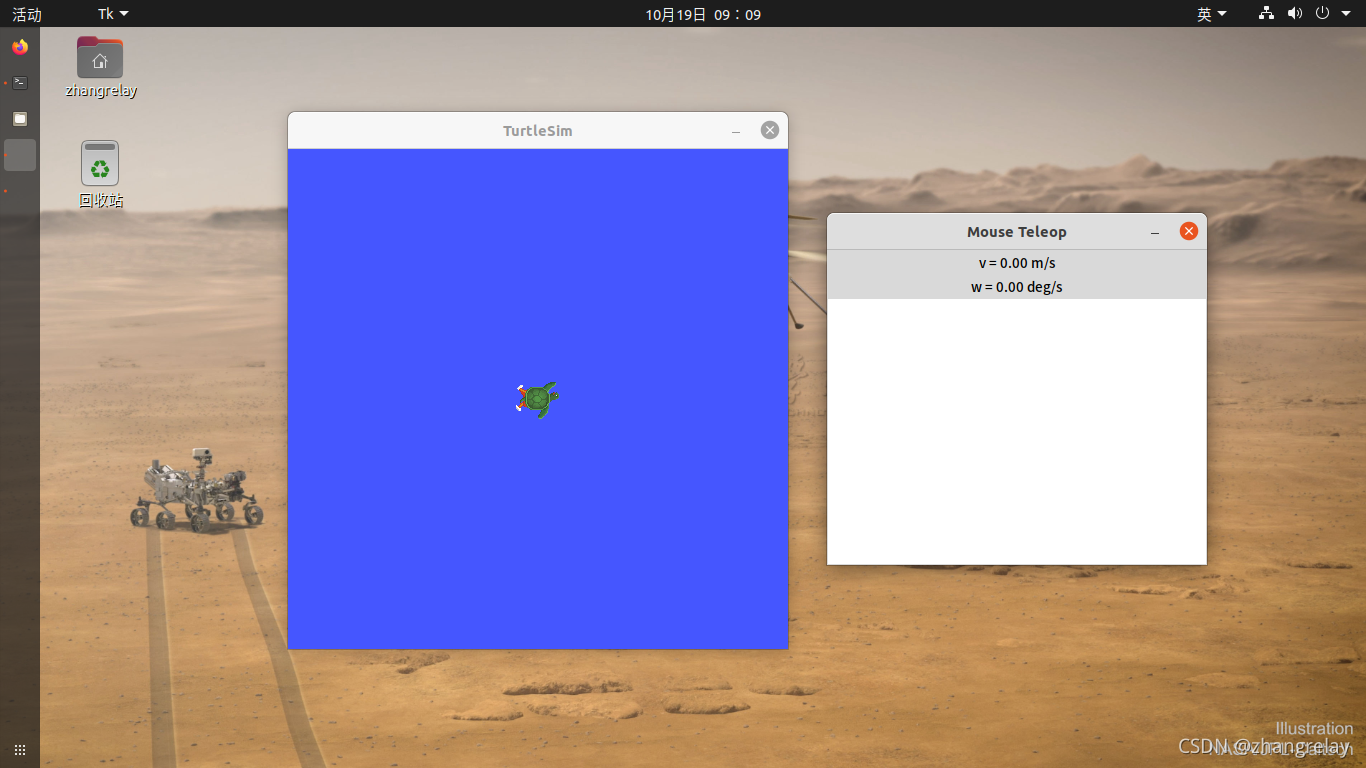
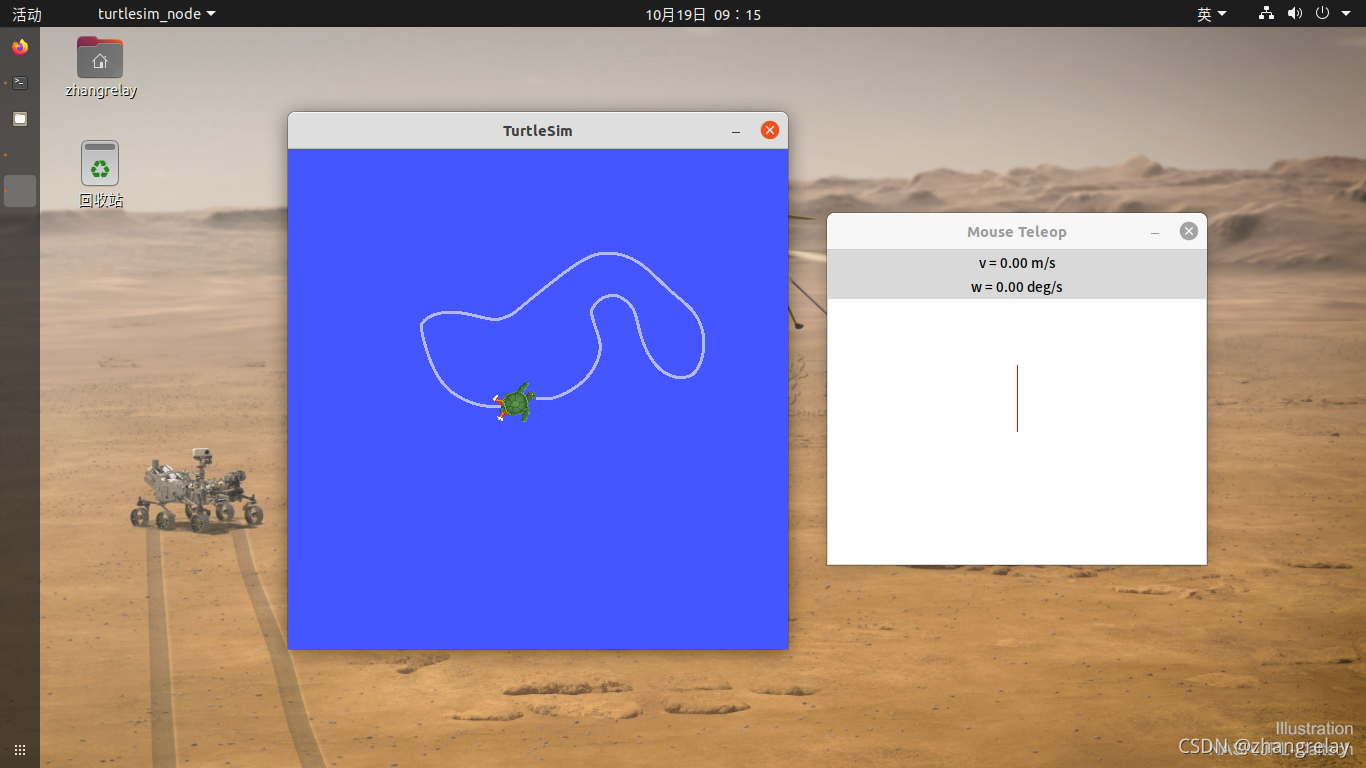
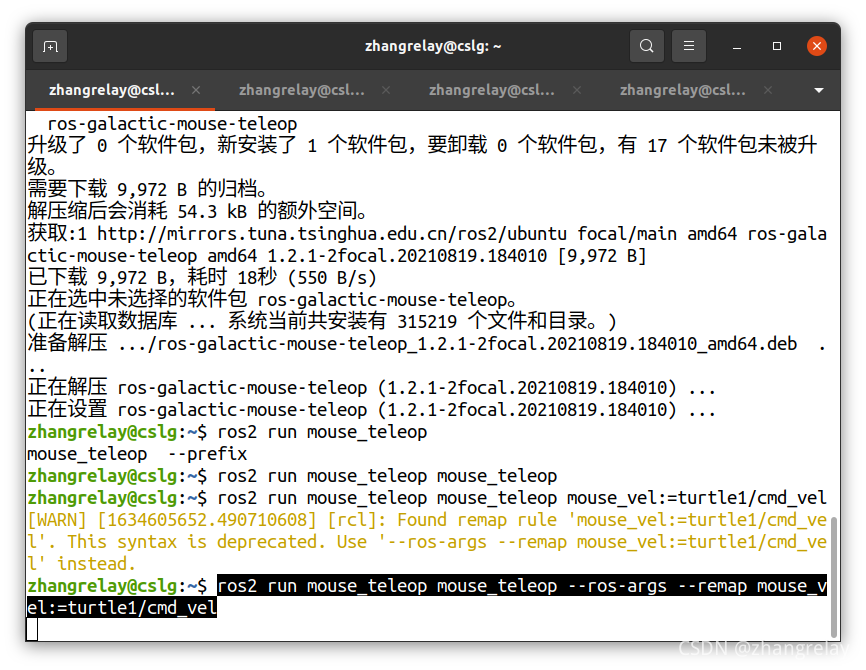
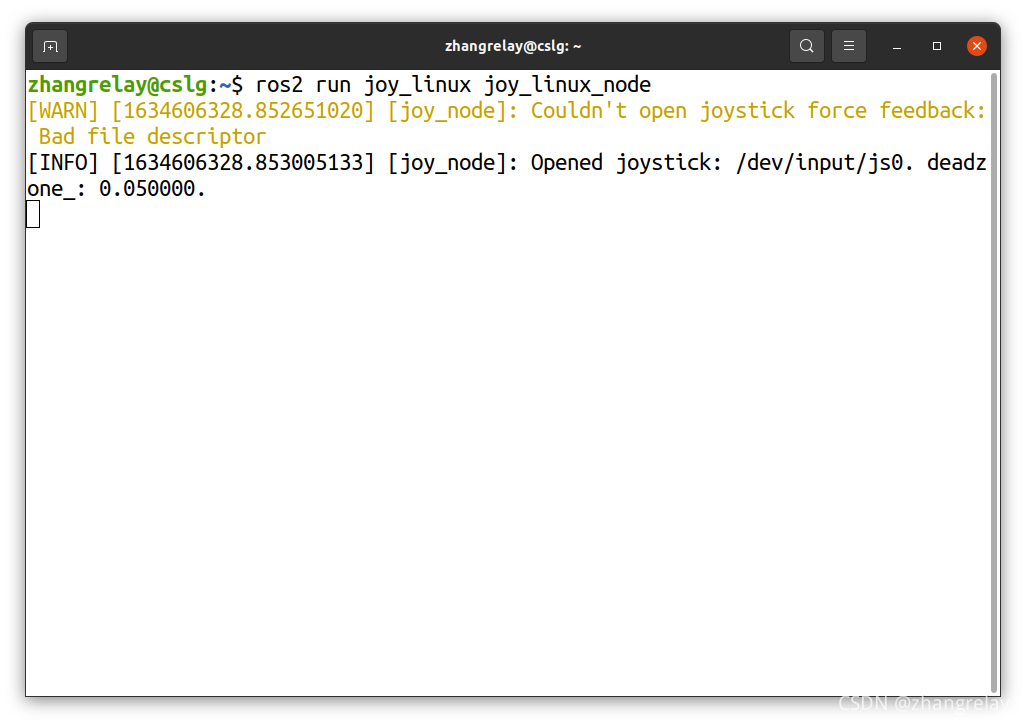
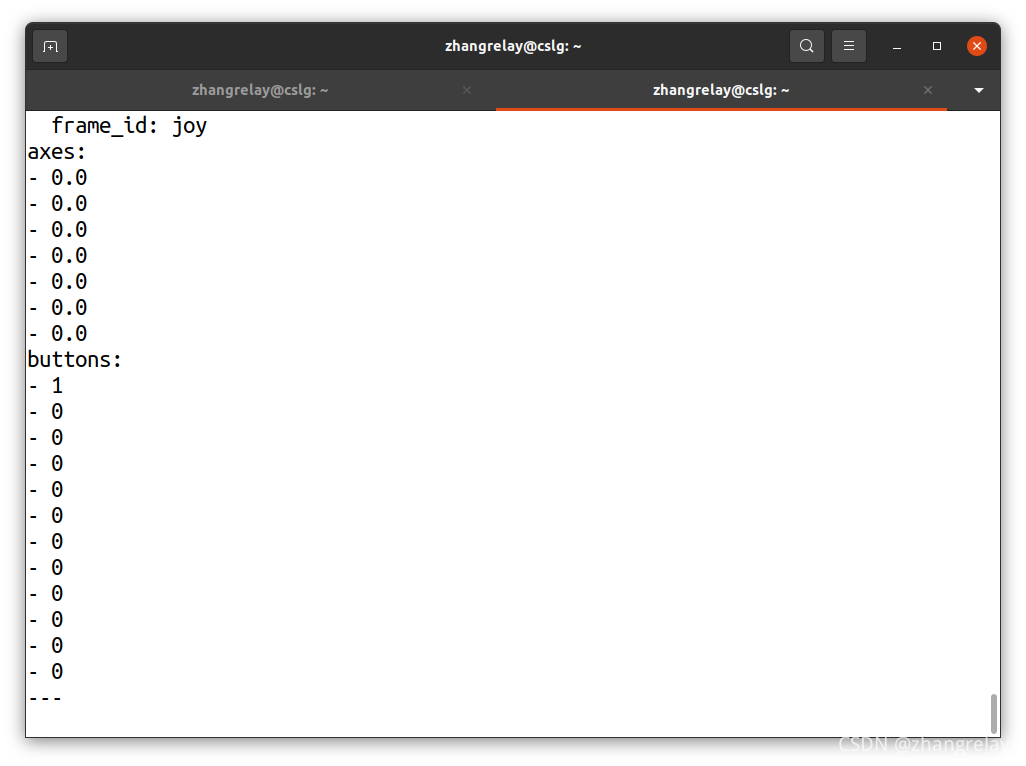
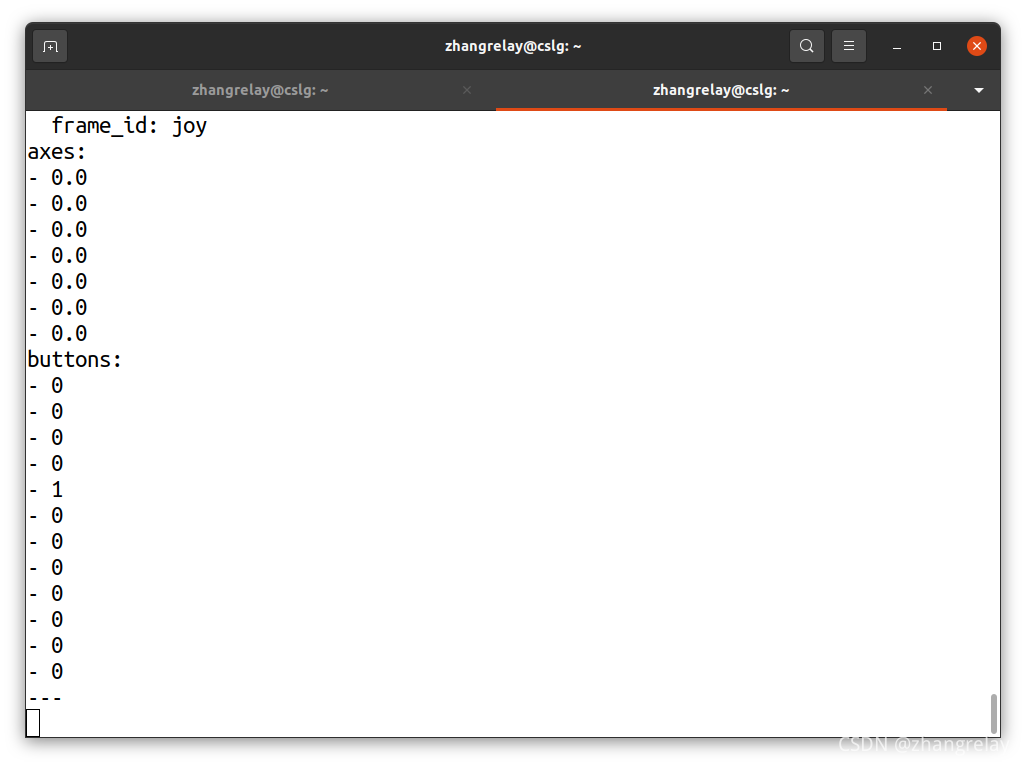
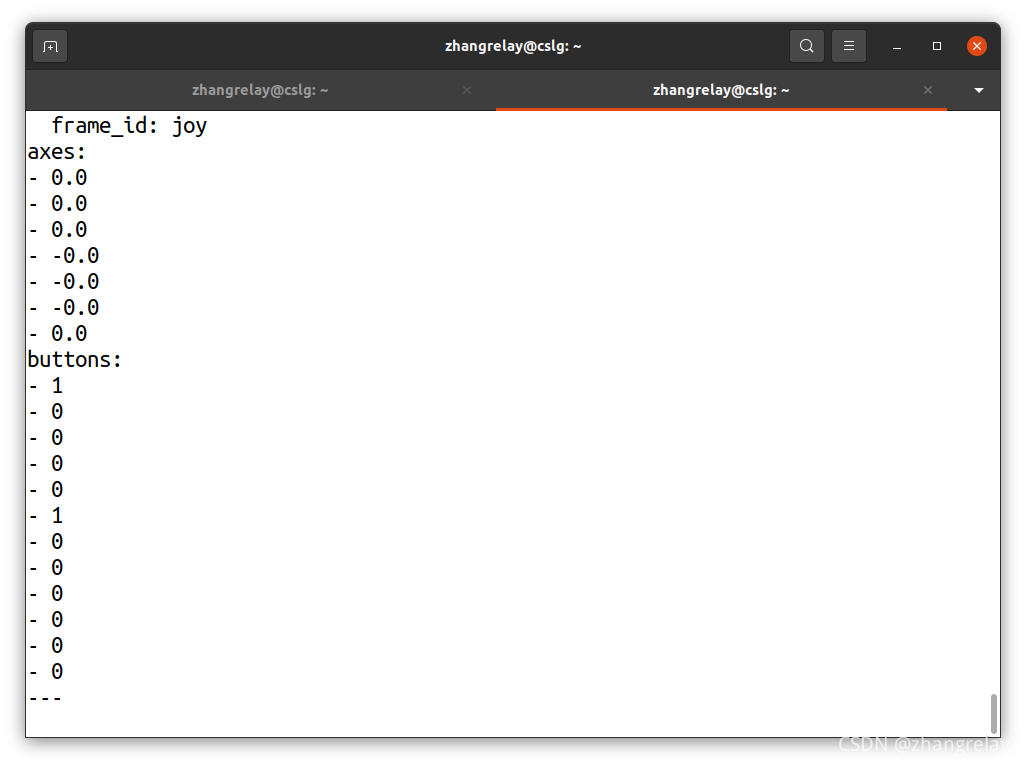
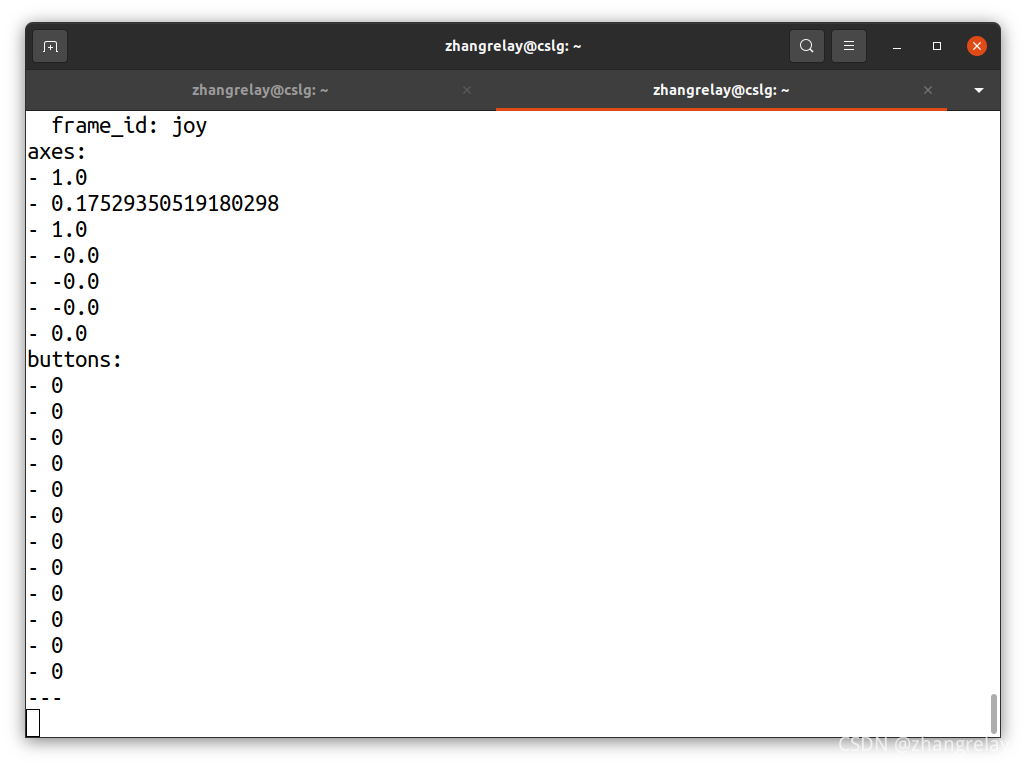
同样可以安装游戏手柄或者鼠标作为遥控器。具体过程已经在课程授课时候讲过了,此处不在重复。给出案例图:
ROS2支持的外设也会越来越多的。
 本文探讨了如何利用ROS2框架进行机器人配置,包括通过源码和apt安装额外功能包,如USB摄像头支持、游戏手柄遥控以及日益增长的官方设备兼容。课程中详细讲解了这些设备的安装和整合实例。
本文探讨了如何利用ROS2框架进行机器人配置,包括通过源码和apt安装额外功能包,如USB摄像头支持、游戏手柄遥控以及日益增长的官方设备兼容。课程中详细讲解了这些设备的安装和整合实例。
使用源码或者apt可以安装更多的功能包,使用各式各样的传感器和驱动器去组合自己的机器人。
镜像自带usb_cam可以打开笔记本电脑的摄像头。
同样可以安装游戏手柄或者鼠标作为遥控器。具体过程已经在课程授课时候讲过了,此处不在重复。给出案例图:
ROS2支持的外设也会越来越多的。
 471
896
702
471
896
702

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























