



 本文介绍在Ubuntu20.04环境下安装ROS1终结版的过程,包括功能包命名规则变化、常用工具安装及电源管理配置,提供快速开始机器人开发的指南。
本文介绍在Ubuntu20.04环境下安装ROS1终结版的过程,包括功能包命名规则变化、常用工具安装及电源管理配置,提供快速开始机器人开发的指南。
使用20.04一段时间了,在此环境下进行机器人开发环境的测试。
ros1最终版即将推出了:
- http://packages.ros.org/ros/ubuntu focal InRelease
请注意如下功能包命名规则:
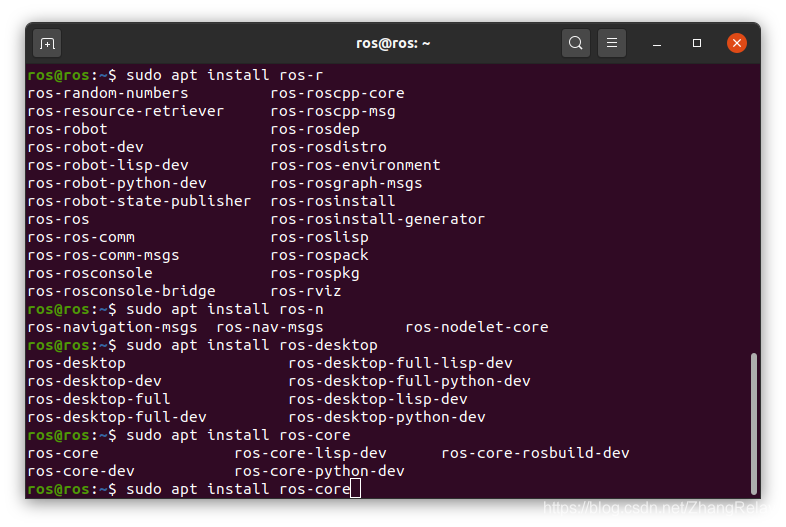
已经不需要加版本号了,这应该是ros1终结版了。
安装完成后,使用一些如:
快速打开终端方式:Ctrl + Alt + T
更新系统:sudo apt update && sudo apt upgrade -y
多媒体支持:sudo apt install ubuntu-restricted-extras
Synaptic:sudo apt-get install synaptic
Microsoft字体:ttf-mscorefonts-installer
其他常用工具:wps, chrome, vlc, gimp, uget等。
电源管理:
- sudo add-apt-repository ppa:linrunner/tlp
- sudo apt-get install tlp tlp-rdw
- sudo tlp start
详细配置参考如下文档连接:
当然还可以打开夜间模式。
系统清理:sudo apt install bleachbit


















 2606
2606

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











