




 本文介绍了一种采用图形化编程环境mBlock和机器人仿真平台V-REP进行机器人实验的方法,降低了实验门槛,实现了模拟量采集、电机调速和自动控制等功能。通过配置虚拟串口VSPE,用户可以在无需真实硬件的情况下进行寻线、避障等实验,深入理解机器人各组件功能。
本文介绍了一种采用图形化编程环境mBlock和机器人仿真平台V-REP进行机器人实验的方法,降低了实验门槛,实现了模拟量采集、电机调速和自动控制等功能。通过配置虚拟串口VSPE,用户可以在无需真实硬件的情况下进行寻线、避障等实验,深入理解机器人各组件功能。
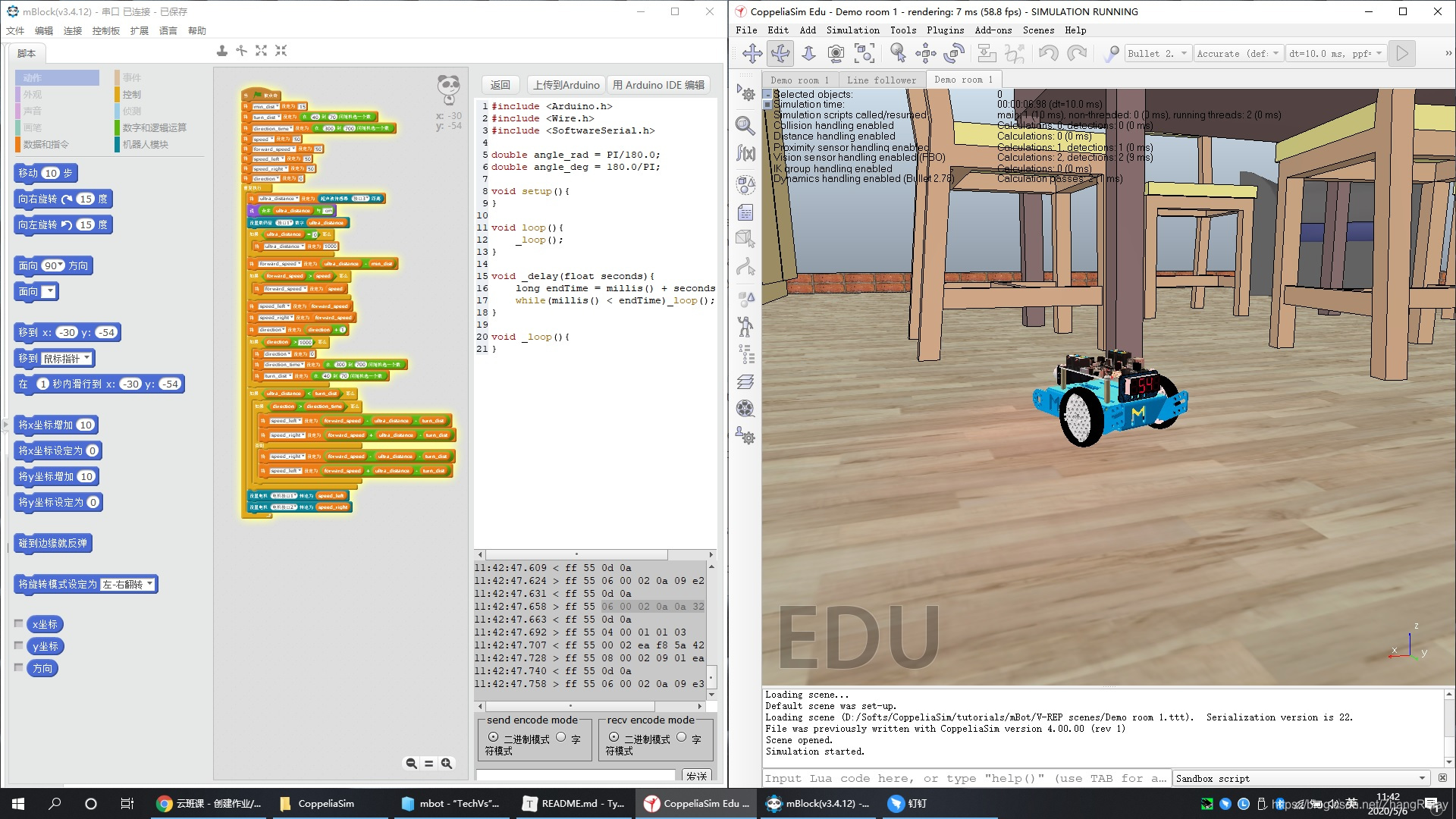
为了进一步降低实验门槛,采用图形化编程和机器人,可以完成模拟量采集,电机调速和自动控制等单项和综合实验。
需要如下软件:
- 机器人仿真平台:V-REP

- 图形化编程环境:mBlock

- 虚拟串口仿真器:VSPE

各软件详细版本号如下:
- CoppeliaSim Edu 4.0.0 (V-REP)
- mBlock_win_V3.4.12 请不要安装5+版本无法运行
- SetupVSPE_64.msi Product: Virtual Serial Ports Emulator Version: 0.942.5.238 Release date: Apr 21, 2020
配置注意事项:
文首网址有详细的安装和使用说明,这里只说明一些容易出错的点。
端口使用虚拟串口一定要配置正确!
comPort = "\\\\.\\COM9"在机器人mBotScript,做对应修改。
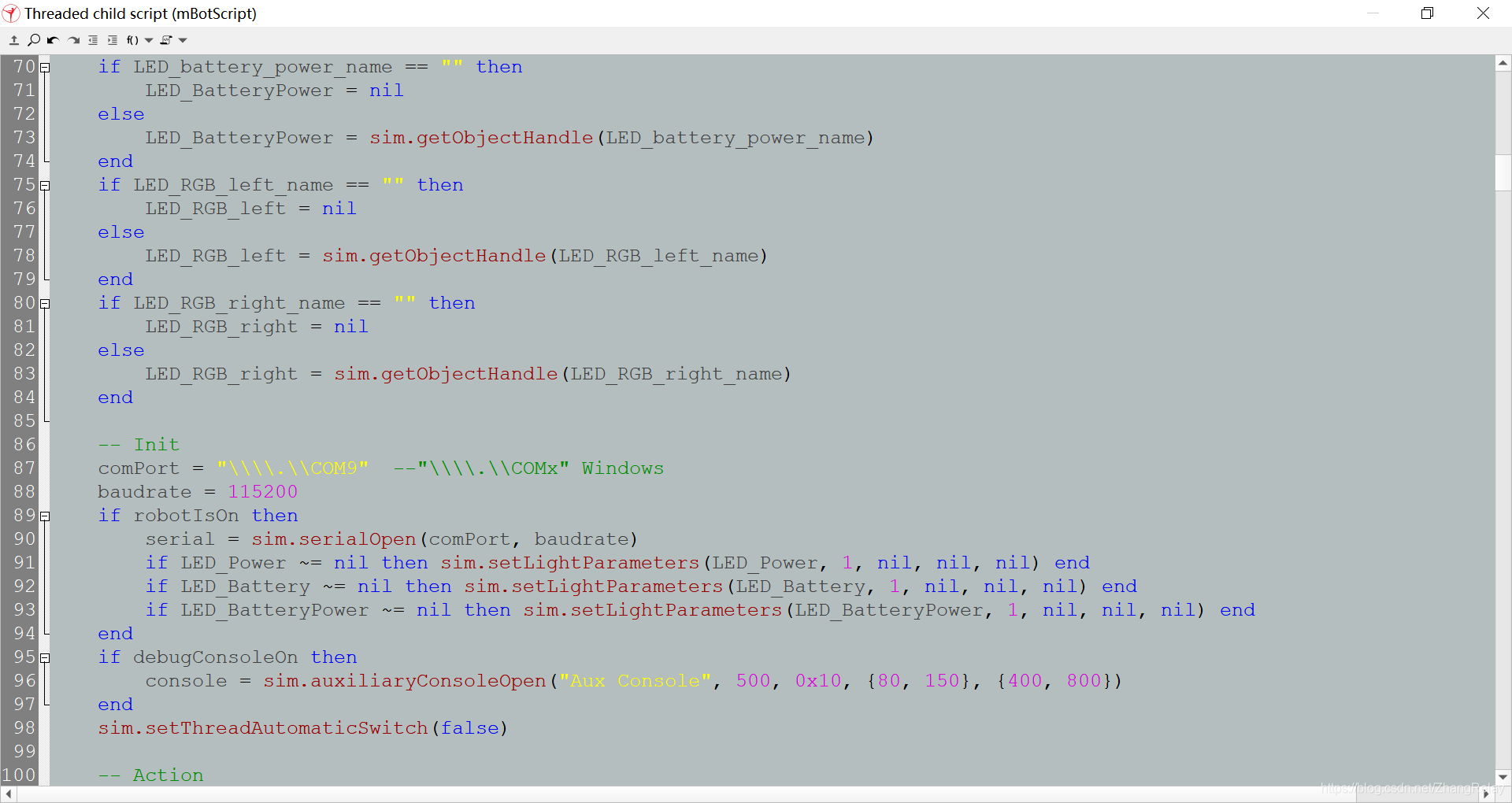
删去不必要的代码。
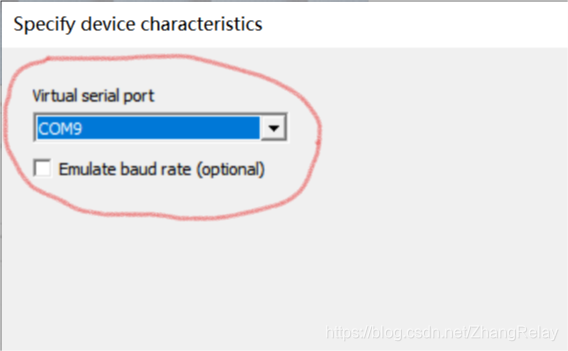
然后,配置虚拟端口:
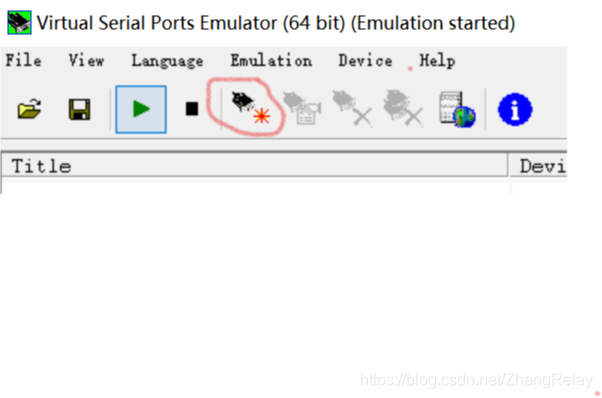
新建串口,选择COM9,和V-REP配置一致即可:
最后打开mblock,在 连接 -- 串口 -- 选择com9。
环境编程门槛为图形化,控制算法也可以使用图形化方式解决:
- 寻线
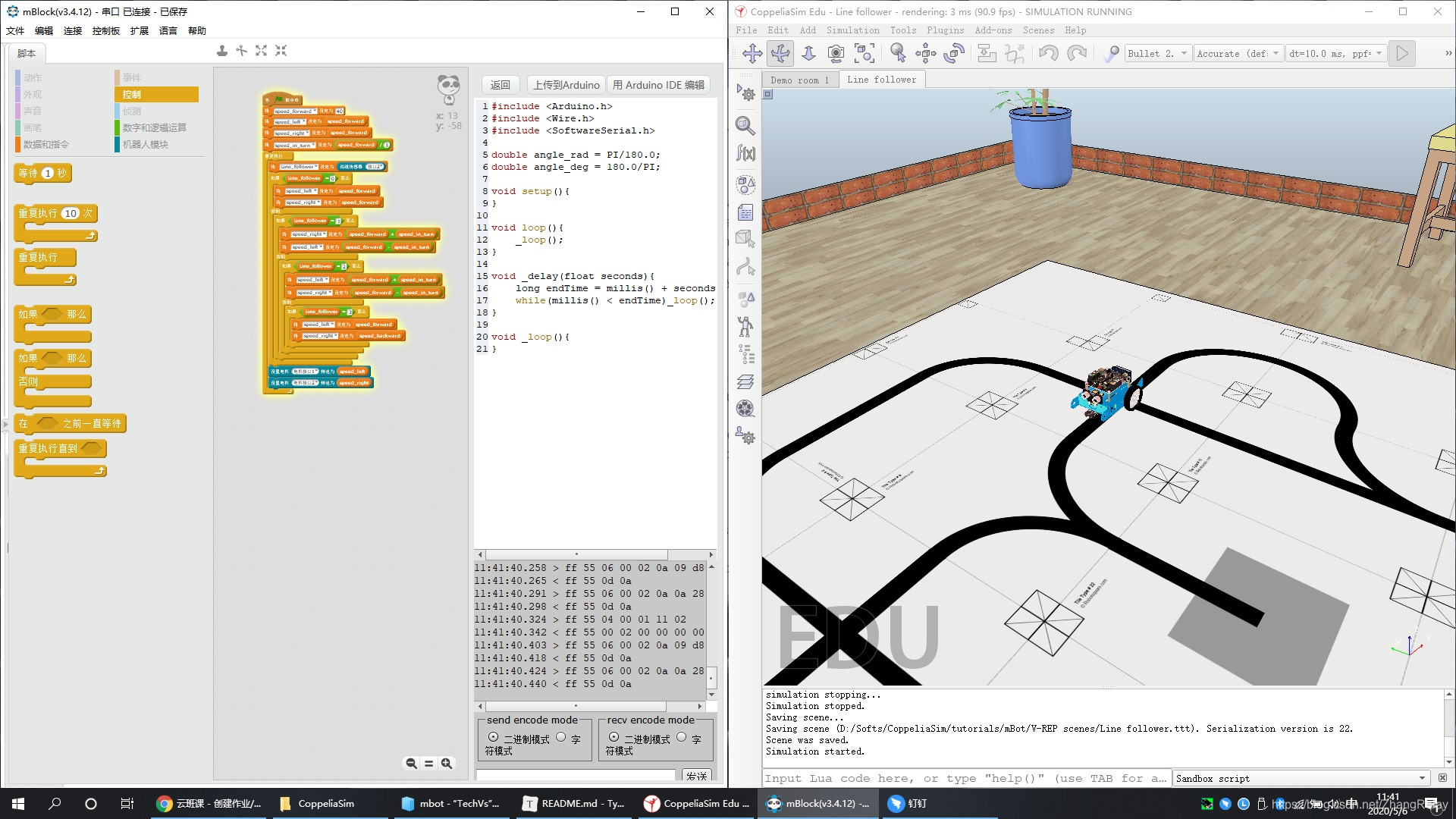
- 避障
调试一下,改变寻线速度或者避障程序,能够理解并分析三个软件模块所起的作用和机器人各组件的功能。


















 391
391

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











