




 本文提供了一个深入学习机器人操作系统(ROS)的指南,包括WindowsIoT和LinuxIoT介绍,以及在Windows10和Ubuntu18.04下安装ROS的具体步骤。通过典型案例,如消息传输和Arduino集成,帮助读者理解ROS在不同平台上的应用。
本文提供了一个深入学习机器人操作系统(ROS)的指南,包括WindowsIoT和LinuxIoT介绍,以及在Windows10和Ubuntu18.04下安装ROS的具体步骤。通过典型案例,如消息传输和Arduino集成,帮助读者理解ROS在不同平台上的应用。
机器人操作系统从广义上讲,属于物联网系统的一部分。在学习完成Arduino全部课程之后,必须掌握的机器人工具之一。
这里推荐两款物联网系统:
- Windows IoT:https://developer.microsoft.com/zh-cn/windows/iot
- Linux IoT:https://cn.ubuntu.com/internet-of-things
如何入门学习参考:
经过2次答疑课,发现部分同学困惑于网络杂乱的资料,迷失了目标。
所有算法不分平台,源码编译不分系统!!!
所有课程案例均可在Windows 10和Ubuntu 18.04下实现,并全部经过测试和课堂演示。
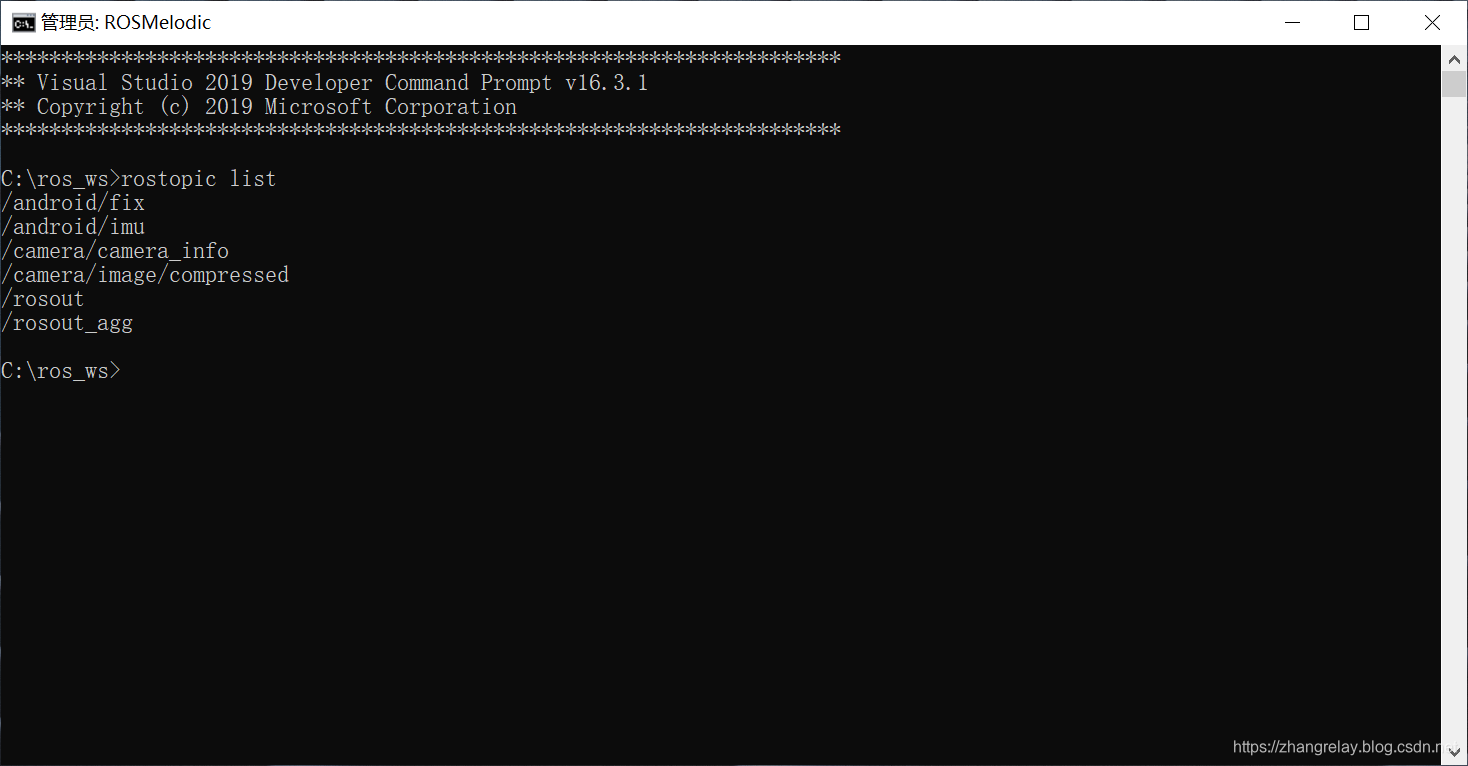
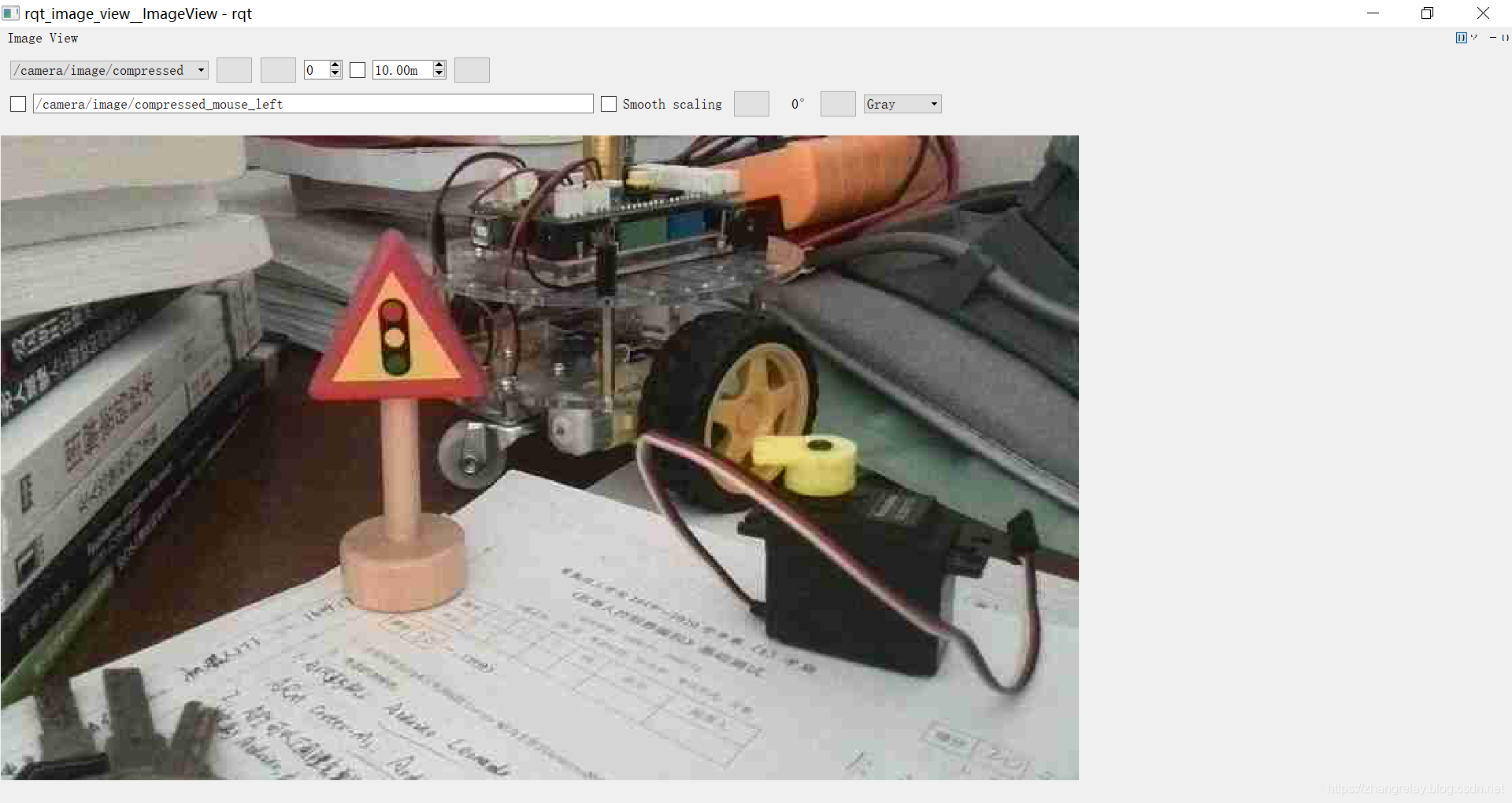
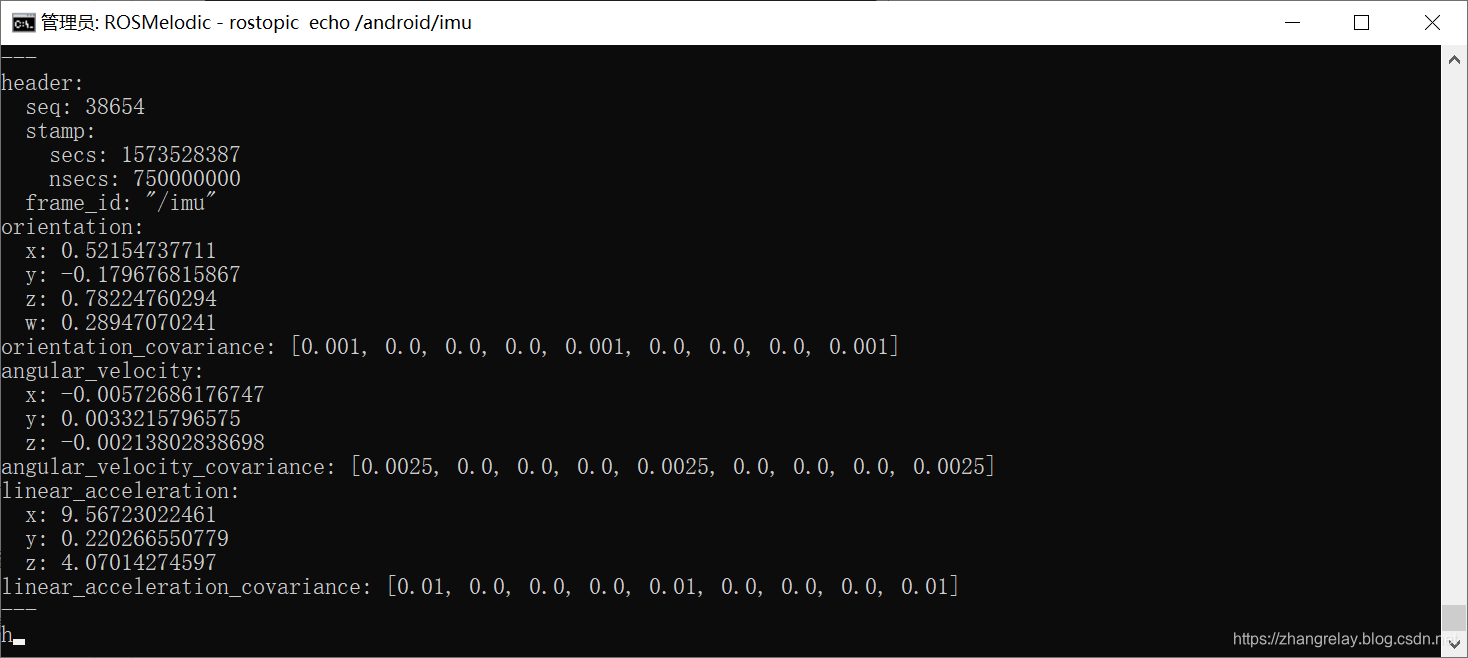
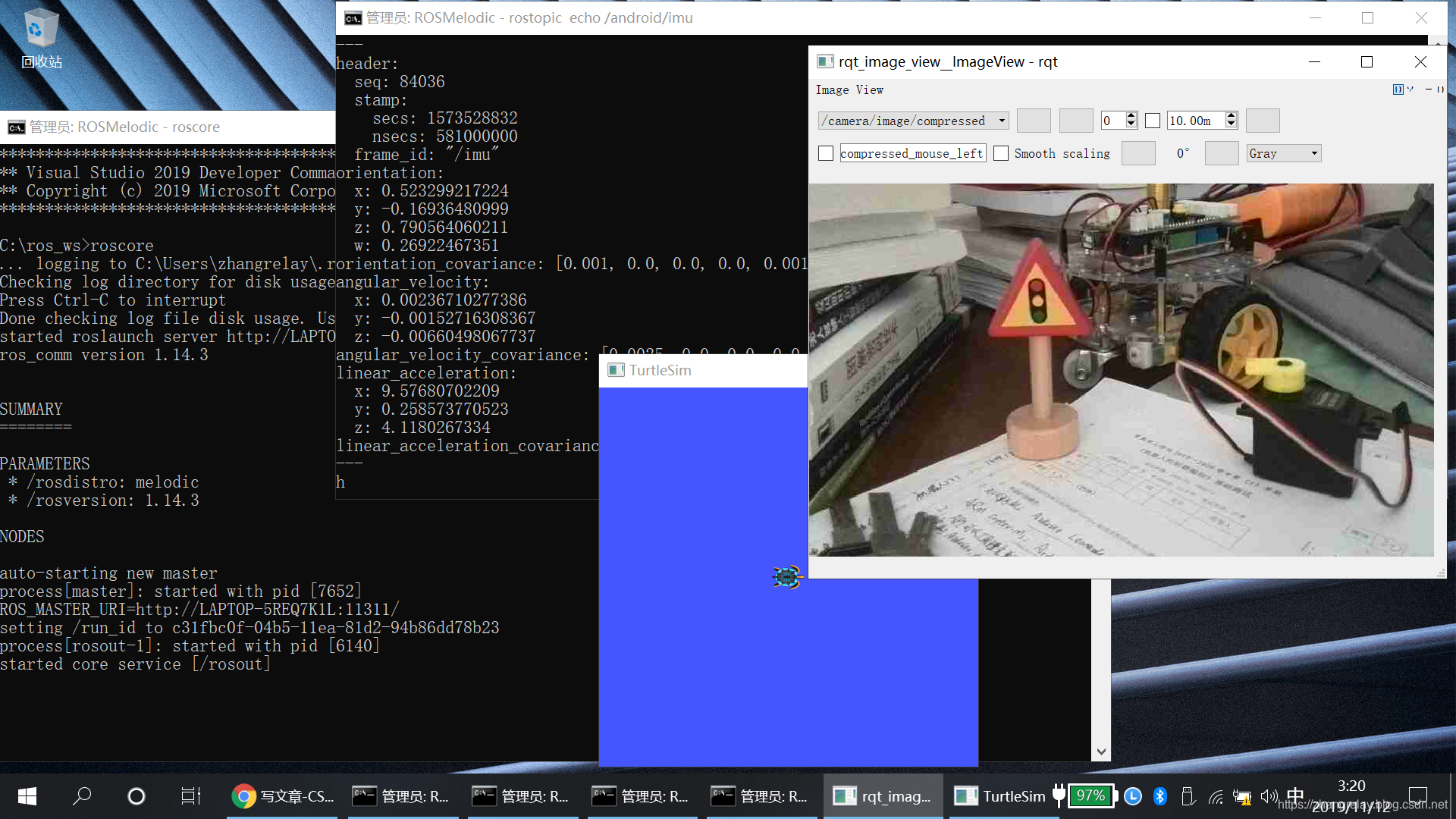
典型案例1-消息传输-Windows:
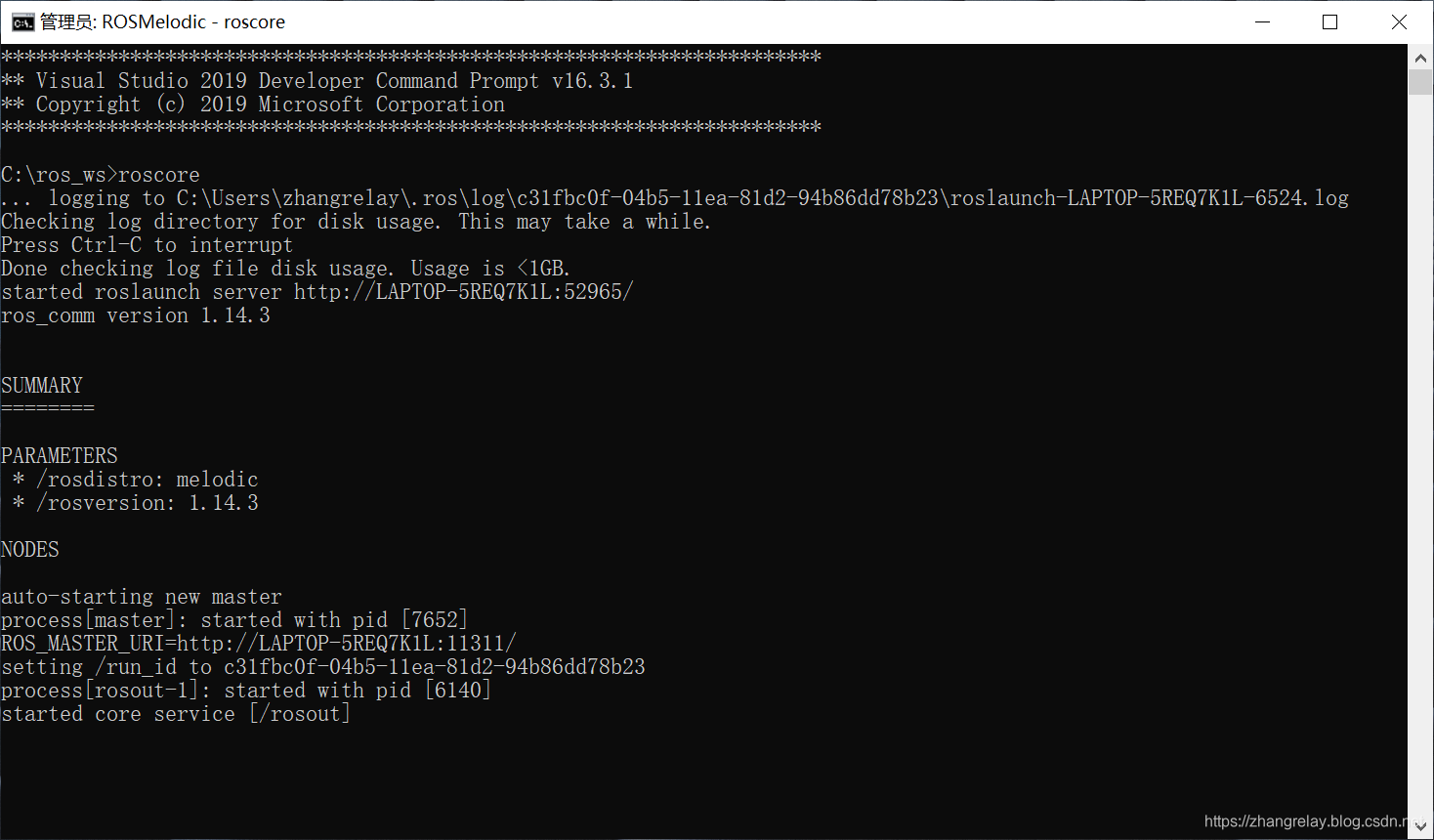
启动手机端APP。
典型案例2-Ubuntu端:
-Fin-


















 665
665

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











