







一、双海龟跟随实验
首先安装双海龟的例子。
在ubuntu20.04下,用的指令是
sudo apt-get install ros-noetic-turtle-tf其他版本把noetic换成melodic或者kinetic
然后执行
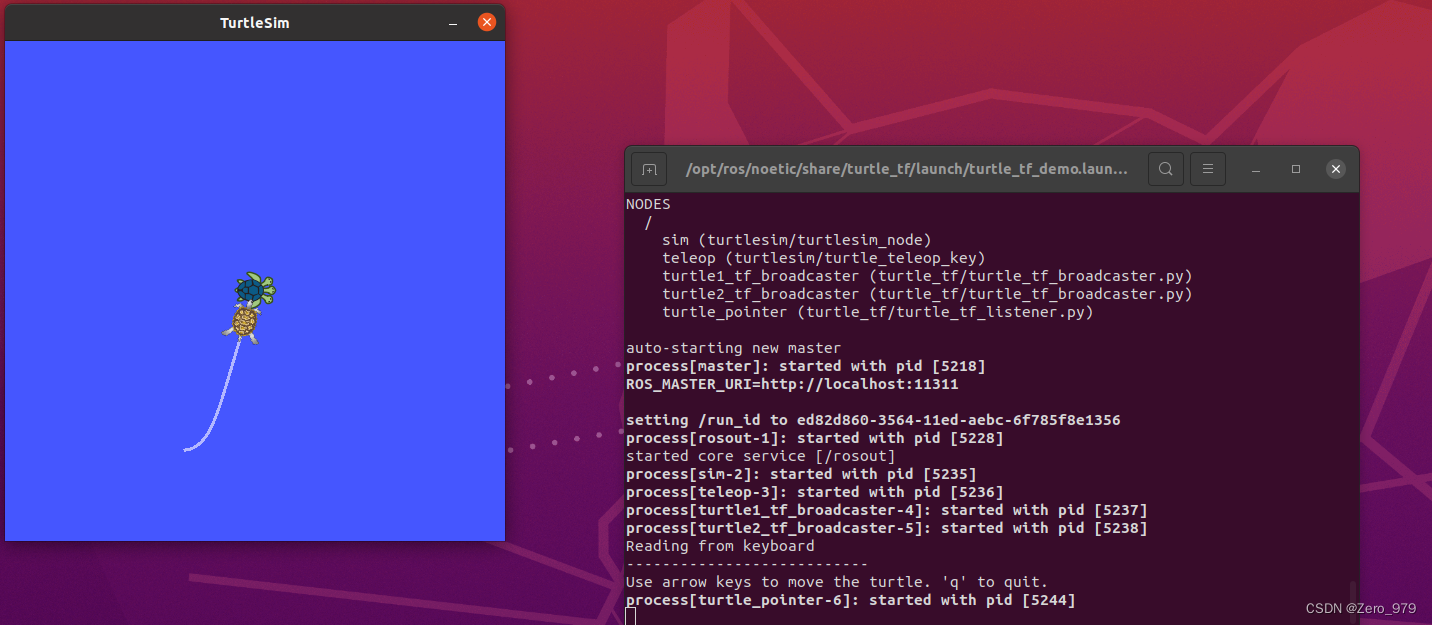
roslaunch turtle_tf turtle_tf_demo.launch这里基本会报错说 “python”: 没有那个文件或目录
解决方法:sudo apt install python-is-python3
然后重新执行命令就可以看到两个小乌龟
再运行海龟的键盘控制节点
rosrun turtlesim turtle_teleop_key就可以控制一只海龟运动了,另一只海龟会追逐它。
view_frames
rosrun tf view_frames不出意外的话会报错

解决方法:
运行 sudo vim /opt/ros/noetic/lib/tf/view_frames
将第89行代码m = r.search更改为m = r.search(vstr.decode('utf-8'))
其中进入vim模式后,按i进入编辑模式,修改完代码后按esc退出编辑模式后,输入 :wq 保存并退出。
<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5832
5832

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









