




Coordinate 和 ListNode 是 “数据容器与属性容器” 的分层关联关系:ListNode 作为 “上层图形属性管理者”,通过指针持有 Coordinate(“下层坐标数据载体”),两者配合实现 “图形属性 + 坐标数据” 的完整存储,专门适配激光标记等需要精准关联 “图形类型” 与 “位置信息” 的场景。
一、核心关系:ListNode 持有 Coordinate 的指针(聚合关系)
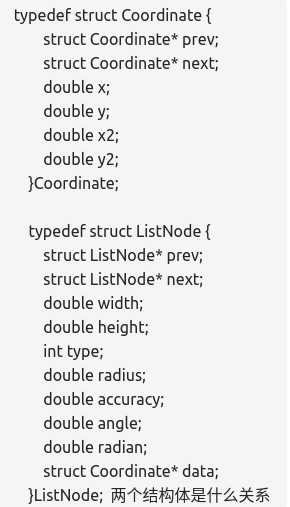
两个结构体的关联核心在 ListNode 的成员变量 struct Coordinate* data—— 这是一个指向 Coordinate 结构体的指针,意味着:
ListNode不直接 “包含”Coordinate的所有成员(不是把Coordinate直接嵌入ListNode),而是通过指针 “引用”Coordinate实例;- 一个
ListNode可以对应 一个Coordinate实例(最常见,如一个矩形图形对应一组对角坐标); - 理论上也可对应多个
Coordinate实例(通过Coordinate的prev/next形成链表,如一个多边形对应多个顶点坐标对)。
二、关系的具体体现(分工明确)
两者的角色完全分离,分别负责 “图形属性” 和 “坐标数据”,避免数据混杂,方便维护和扩展:
| 结构体 | 核心角色 | 存储内容(职责边界) |
|---|---|---|
Coordinate | 坐标数据载体 | 纯位置信息:- x/y/x2/y2:点或点对的坐标(如起点 / 终点、对角点)- prev/next:串联多个坐标(形成坐标链表) |
ListNode | 图形属性管理者 | 图形的非位置属性:- type:图形类型(如 1 = 点、5 = 矩形,决定业务逻辑)- width/height:矩形尺寸- radius:圆半径- angle/radian:旋转角度- data:关联对应的坐标数据(绑定属性与位置) |
三、实际业务中的配合逻辑(结合你的激光场景)
以你之前的激光标记代码为例,两者的协作流程非常清晰:
-
当需要标记一个 “矩形” 时:
- 先创建
ListNode实例:设置type=5(标记为矩形)、width=10(矩形宽)、height=5(矩形高); - 再创建
Coordinate实例:设置x=50,y=80(矩形左上角)、x2=150,y2=30(矩形右下角); - 通过
ListNode->data = Coordinate实例的指针,将 “矩形属性” 与 “矩形坐标” 绑定。
- 先创建
-
遍历
ListNode链表生成激光指令时:- 先判断
ListNode->type=5(确定是矩形),从而执行矩形标记逻辑; - 再通过
ListNode->data拿到Coordinate实例,读取x/y/x2/y2坐标,生成矩形路径。
- 先判断
四、关键特性(为什么要这样设计?)
这种 “指针关联” 的设计比 “直接嵌入” 更灵活,核心优势有两点:
- 解耦属性与数据:若需要修改坐标(如调整矩形位置),只需改
Coordinate实例,无需动ListNode的属性;若需要修改图形尺寸,只需改ListNode的width/height,无需动坐标。 - 支持复杂图形:若需要标记 “多边形”(多个顶点),只需通过
Coordinate的prev/next串联多个坐标对,再用一个ListNode关联这个坐标链表(data指向坐标链表的头节点),无需定义新的结构体。
五、内存管理注意事项(关联带来的约束)
由于 ListNode 通过指针关联 Coordinate,删除 ListNode 时必须同步处理 Coordinate 的内存,否则会导致内存泄漏:
cpp
运行
// 正确的删除逻辑:先删 Coordinate,再删 ListNode
void deleteListNode(ListNode* node) {
if (node->data != nullptr) {
// 若 Coordinate 是链表,需先遍历删除所有 Coordinate 节点
Coordinate* coord = node->data;
while (coord != nullptr) {
Coordinate* temp = coord;
coord = coord->next;
delete temp;
}
}
delete node; // 最后删 ListNode
}
总结:ListNode 和 Coordinate 是 “1 对 N”(1 个图形属性对应 N 个坐标数据)的聚合关系,前者管 “是什么图形”,后者管 “图形在哪里”,共同支撑激光标记等需要 “属性 + 位置” 精准绑定的业务场景。

















 573
573

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









