



1、拓扑算法
(1)AOV网(Activity On Vertex Network):表示工程的有向图中用顶点表示活动,用弧表示活动之间的优先顺序的网。
(2)拓扑排序:拓扑排序是对有向无环图 (DAG) 的顶点进行排序的算法,使得对于每一条有向边 (u,v),顶点 u 在排序中都出现在顶点 v 之前。
(3) 检测是否有环:如果网的顶点全部被输出则说明不存在回路,否则存在回路。
算法实现:
代码及注释如下:
#include<iostream>
#include<vector>
#include<list>
#include<queue>
using namespace std;
//该算法比较适合使用邻接表构造图
struct vertex{
int in=0;//这里添加一个int表示入度
char vexc;//表示顶点字符
list<int>vexl;//表示与顶点相连通的点在顶点数组中的坐标
};
struct LGraph{ //LGraph表示邻接表构成的图(list)
vector<vertex>vex;
vector<int>topo;//拓扑排序序列
LGraph(int n){
vex.resize(n);
}
};
int findPos(LGraph lg,char vn){
int n=lg.vex.size();
int i;
for(i=0;i<n;i++){
if(lg.vex[i].vexc==vn)
return i;
}
return -1;
}
void creatLGraph(LGraph& lg,int n,int k){
int i;
for(i=0;i<n;i++){
cin>>lg.vex[i].vexc;
}
for(i=0;i<k;i++){
char v1,v2;
cin>>v1>>v2;
int M=findPos(lg,v1);
int N=findPos(lg,v2);
if(M>=0&&N>=0){
lg.vex[M].vexl.push_back(N);
lg.vex[N].in++;
}
}
}
bool TopoSort(LGraph&lg){
int n=lg.vex.size();
vector<int>in_copy;
int i;
for(i=0;i<n;i++){ //复制一份in,方便后期修改
in_copy.push_back(lg.vex[i].in);
}
queue<int> q;//用来临时存放 入度为0且没被删除的点
for(i=0;i<n;i++){//先压入入度为0的点
if(in_copy[i]==0)
q.push(i);
}
//进行拓扑排序
while(!q.empty()){
i=q.front();
lg.topo.push_back(i);
list<int>::iterator it=lg.vex[i].vexl.begin();
while(it!=lg.vex[i].vexl.end()){
in_copy[*it]--;
if(in_copy[*it]==0)
q.push(*it);
it++;
}
q.pop();
}
return lg.topo.size() == n;;
}
int main(){
int t;
cin>>t;
while(t--){
int n,k,i;//n表示顶点数,k表示弧数
cin>>n>>k;
LGraph lg(n);
creatLGraph(lg,n,k);
if(TopoSort(lg)){
for(i=0;i<lg.topo.size();i++){
cout << lg.vex[lg.topo[i]].vexc<<" "; // 输出顶点字符
}
cout<<endl;
}
else
cout << "图中存在环,无法进行拓扑排序"<<endl;
}
return 0;
}
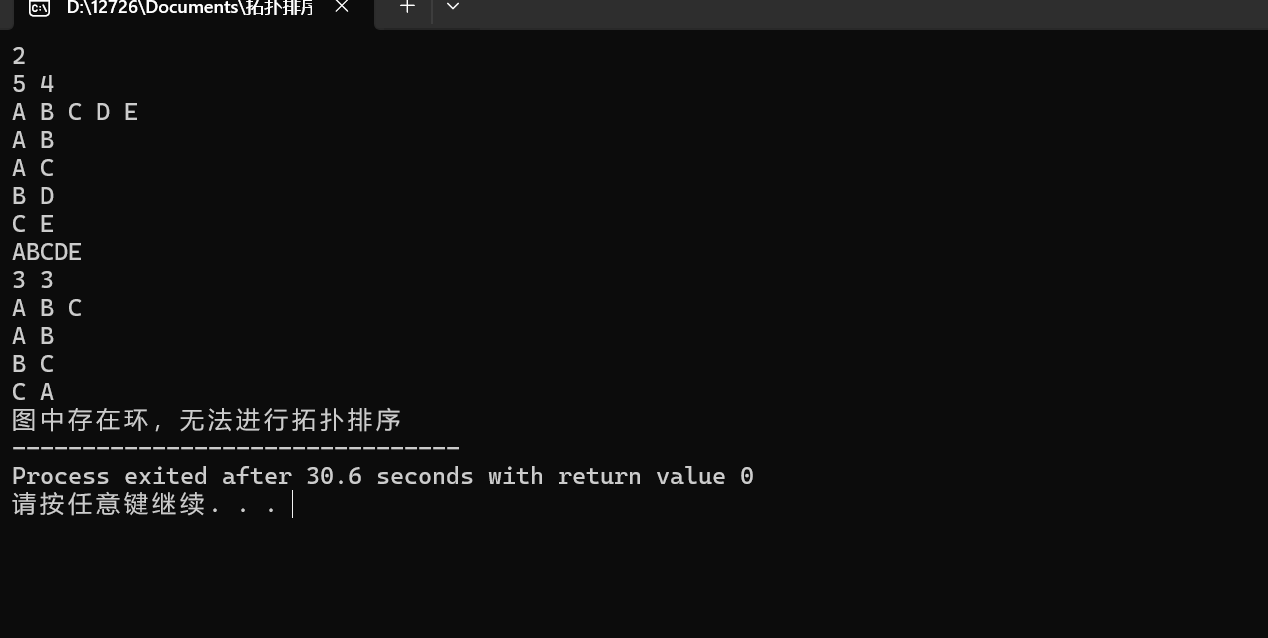
输入输出如下:
2、关键路径算法:
(1)AOE网(Activity On Edge Network):表示工程的有向图中用顶点表示活动,用弧表示活动之间的优先顺序,同时边上带权值的网。
(2)源点:入度为0的点;
汇点:出度为0的点;
(3)关键路径:从源点到汇点具有最大长度的路径
(4)算法实现原理:这里需要引入两参数:事件的最早发生时间etv和最晚发生时间ltv
最早发生时间即表示最快能在什么时候发生
最晚发生时间即最晚需要在什么时候发生,超过这个时间就延误整个工期
最早发生时间和最晚发生时间相同的事件称为关键活动,
由关键活动组成的路径即为关键路径
所以整个算法的关键就是求最早发生时间etv和最晚发生时间ltv!
代码及其注释如下:
#include<iostream>
#include<vector>
#include<list>
#include<queue>
using namespace std;
struct nextvex{ //用该结构体来表示与顶点相连接的点,包含该点的下标和两点间的权值
int vexi; //表示下标
int weight; //表示权值
nextvex(int v,int w):vexi(v),weight(w){
}
};
struct vertex{
int in=0;//这里添加一个int表示入度
char vexc;//表示顶点字符
list<nextvex>vexl;
};
struct LGraph{ //LGraph表示邻接表构成的图(list)
vector<vertex>vex;
vector<int>etv;//事件最早发生时间数组
vector<int>ltv;//事件最晚发生时间数组
vector<int>topo;//拓扑排序序列
LGraph(int n){
vex.resize(n);
etv.resize(n);
ltv.resize(n);
int i;
for(i=0;i<n;i++){
etv[i]=0;
ltv[i]=0x7FFFFFFF;
}
}
};
int findPos(LGraph lg,char vn){
int n=lg.vex.size();
int i;
for(i=0;i<n;i++){
if(lg.vex[i].vexc==vn)
return i;
}
return -1;
}
bool getEtvAndLtv(LGraph& lg){//获取 事件最早和最晚发生时间数组
int n=lg.vex.size();
int i,j;
vector<int>in_copy;
for(i=0;i<n;i++){ //复制一份in,方便后期修改
in_copy.push_back(lg.vex[i].in);
}
queue<int> q;//用来临时存放 入度为0且没被删除的点
for(i=0;i<n;i++){ //找到源点
if(in_copy[i]==0){
q.push(i);
}
}
//这里先进行拓扑排序并求得 事件最早发生时间
while(!q.empty()){
i=q.front();
lg.topo.push_back(i);
list<nextvex>::iterator it=lg.vex[i].vexl.begin();
while(it!=lg.vex[i].vexl.end()){
if(lg.etv[it->vexi]<(lg.etv[i]+it->weight)){
lg.etv[it->vexi]=(lg.etv[i]+it->weight);
}
in_copy[it->vexi]--;
if(in_copy[it->vexi]==0)
q.push(it->vexi);
it++;
}
q.pop();
}
if(lg.topo.size()<n){
cout << "图中存在环,无法计算etv" << endl;
return false;
}
lg.ltv[lg.topo[n-1]]=lg.etv[lg.topo[n-1]];
for(i=n-2;i>=0;i--){
list<nextvex>::iterator it=lg.vex[i].vexl.begin();
while(it!=lg.vex[i].vexl.end()){
if(lg.ltv[i]>(lg.ltv[it->vexi]-it->weight)){
lg.ltv[i]=(lg.ltv[it->vexi]-it->weight);
}
it++;
} //cout<<"ggg";
}
return true;
}
void creatLGraph(LGraph& lg,int n,int k){
int i;
for(i=0;i<n;i++){
cin>>lg.vex[i].vexc;
}
for(i=0;i<k;i++){
char v1,v2;
int w;
cin>>v1>>v2>>w;
int M=findPos(lg,v1);
int N=findPos(lg,v2);
if(M>=0&&N>=0){
lg.vex[M].vexl.push_back(nextvex(N,w));
lg.vex[N].in++;
}
}
getEtvAndLtv(lg);
}
void getCrucialWay(const LGraph&lg){
int n=lg.vex.size();
int i;
queue<int> way;
for(i=0;i<n;i++){
if(lg.etv[i]==lg.ltv[i]){
way.push(i);
}
}
while(!way.empty()){
cout<<lg.vex[way.front()].vexc<<" ";
way.pop();
}
cout<<endl;
}
int main(){
int t;
cin>>t;
while(t--){
int n,k;//n表示顶点数,k表示弧数
cin>>n>>k;
LGraph lg(n);
creatLGraph(lg,n,k);
int i;
for(i=0;i<n;i++){
cout<<lg.etv[i]<<" ";
}
cout<<endl;
for(i=0;i<n;i++){
cout<<lg.ltv[i]<<" ";
}
cout<<endl;
getCrucialWay(lg);
}
return 0;
}
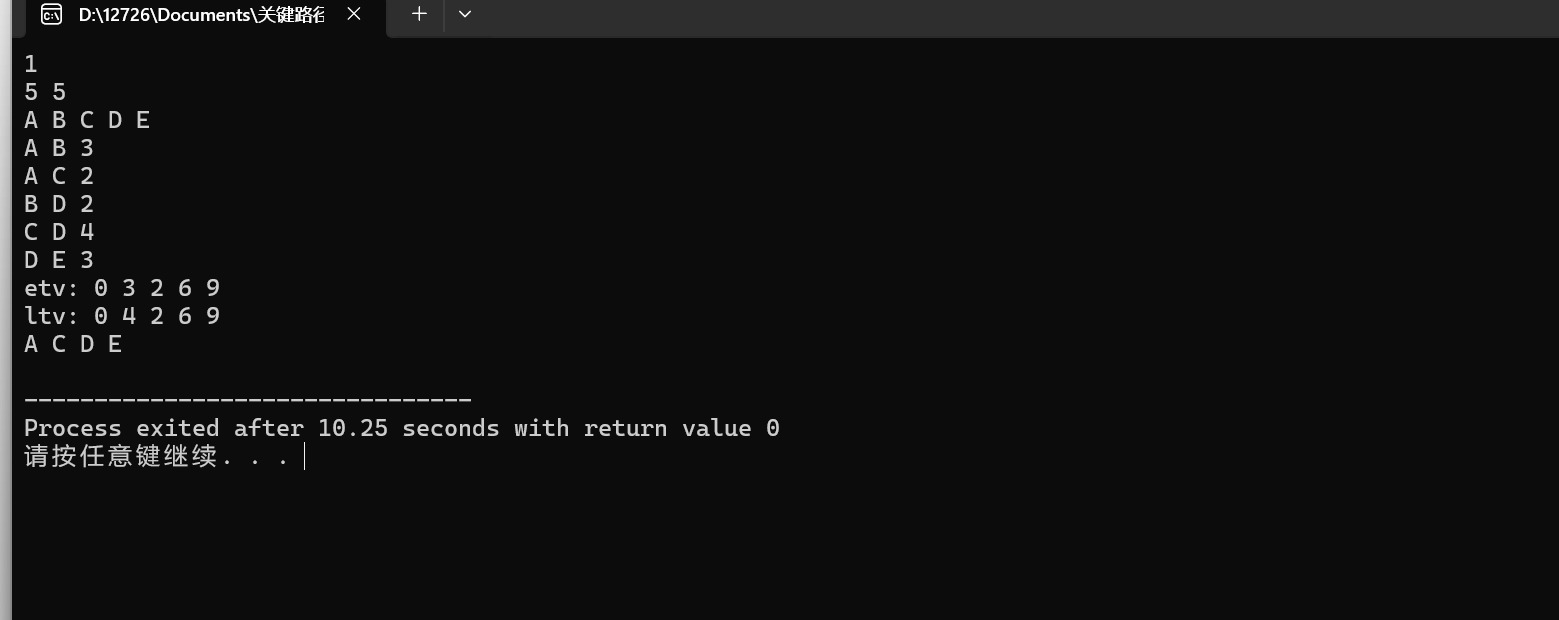
输入输出如下:

















 2038
2038

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









