




上述工作准备差不多以后,就开始具体解决朋友委托的调度问题了。
整体硬件方案:
1、四向穿梭车硬件仅负责动作执行。
设备支持执行动作包括移动,顶起托盘放下托盘。上位机调度系统可以通过Socket下发任务给设备。设备执行完成动作以后,会通过Socket反馈结果给上位机调度系统。
2、硬件层面上无激光雷达等进行碰撞监测。
上位机调度系统在路径规划与任务下发时,需要避免一切碰撞的可能。如果下发路径重合和冲突,设备将会发生碰撞。这一点需要上位系统进行高效率的动态规划,动态的控制地图点位的占用与释放。如果释放慢了,就会长期占用通道,导致其他设备的动作任务无法下发。
3、设备数量不确定,可以动态的进行设备增减。
这个还好,这类设备本身就是比较灵活的,效率不够的时候,增加一台设备,有的设备坏了,可以拉出去维修。
4、单设备效率达到20任务/小时
当设备密度较高时,且任务集中时,这个效率还是比较难达到的,这个需要实际测试。
5、只有横向通道(途中灰色色块)可以在X轴方向上移动,其他位置只能在Y轴方向上移动。
整体布局如下:
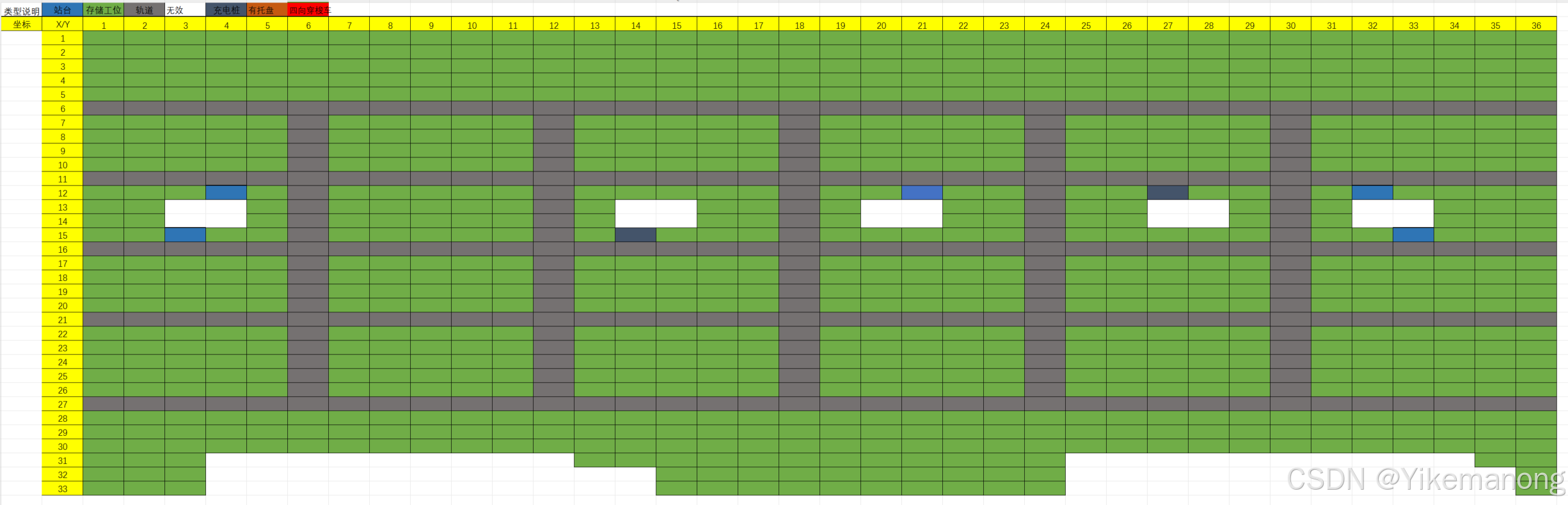
货架共有3个接驳站台和2个充电桩。中间有一些空白的地方,是立柱或者提升机设备占用空间,导致货架不对称,但整体问题不大。
后续将一步一步完成该库的货架建模,并通过模拟仿真测试调度算法运行效果。最终给朋友一个可运行的上位机调度系统。

















 10万+
10万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









