




 本文介绍了如何使用Matlab将二维数据点绕Z轴进行旋转,包括顺时针和逆时针旋转。通过设定旋转矩阵并应用到坐标上,展示了绘制旋转前后图形的过程。
本文介绍了如何使用Matlab将二维数据点绕Z轴进行旋转,包括顺时针和逆时针旋转。通过设定旋转矩阵并应用到坐标上,展示了绘制旋转前后图形的过程。
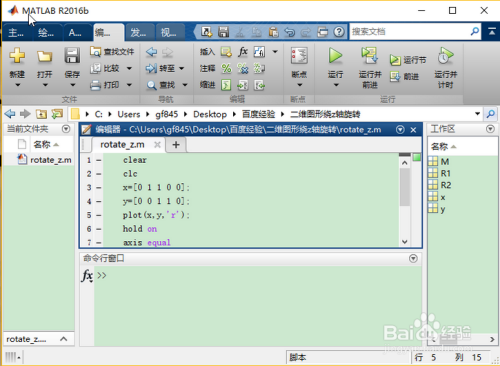
在Matlab中键入以下代码:
clear
clc
x=[0 1 1 0 0];
y=[0 0 1 1 0];
plot(x,y,'r');%绘制正方形
hold on
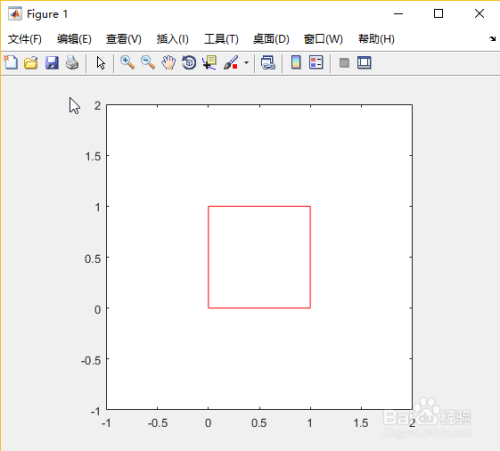
axis equal%将两坐标设为相等
axis([-1 2 -1 2])%设置显示范围
所得结果如图所示。
顺时针旋转图形,其旋转矩阵为M:
M=[cos(pi/6) sin(pi/6);
-sin(pi/6) cos(pi/6);];
R1=[x;y;];
R2=M*R1;%旋转后坐标
plot(R2(1,:),R2(2,:),'b')%绘制旋转后图形
结果如图所示。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 791
791

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









