




ORBSLAM2地图更新策略简介
地图的更新目标在于如何插入新的关键帧和地图点,同样,怎么剔除多余的关键帧和没用的地图点。
接下来,笔者会从下面几个方面来介绍地图的更新策略:
1. 统计当前关键帧的共视图关键帧,构建临时的局部地图;
2. 剔除当前关键帧中质量较差的地图点;
3. 局部地图重投影获取更多匹配对;
4. 剔除冗余的关键帧。
共视图关键帧
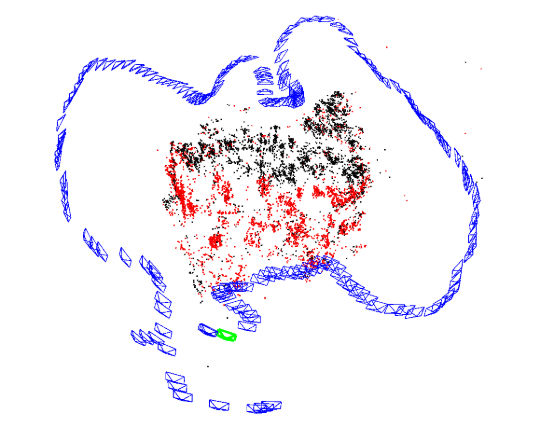
共视图是ORBSLAM2中一个非常重要的概念,他的目的是将与当前帧有共同观测的关键帧集合起来,构建一个临时地图,通过构建更强和更多的约束条件来优化相机的位姿。接下来,我们来看看ORBSLAM2的共视图是如何构建的。
 <
<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 476
476

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









