



 本文介绍了OpenCV中用于三角化的cv::triangulatePoints()函数,重点讲解了如何在左相机坐标系下进行三角化操作。首先,通过pixel2cam函数将像素坐标转换为归一化相机坐标,接着利用cv::triangulatePoints()实现立体视觉中的三角测量。
本文介绍了OpenCV中用于三角化的cv::triangulatePoints()函数,重点讲解了如何在左相机坐标系下进行三角化操作。首先,通过pixel2cam函数将像素坐标转换为归一化相机坐标,接着利用cv::triangulatePoints()实现立体视觉中的三角测量。
OpenCV cv::triangulatePoints()函数使用方法
以左相机坐标系三角化
triangulatePoints(T1, T2, left, right, points_final) ;
Mat T1 = (Mat_<float>(3, 4) <<
1, 0, 0, 0,
0, 1, 0, 0,
0, 0, 1, 0);
Mat T2 = (Mat_<float>(3, 4) <<
R.at<double>(0, 0), R.at<double>(0, 1), R.at<double>(0, 2), T.at<double>(0, 0),
R.at<double>(1, 0), R.at<double>(1, 1), R.at<double>(1, 2), T.at<double>(1, 0),
R.at<double>(2, 0), R.at<double>(2, 1), R.at<double>(2, 2), T.at<double>(2, 0)
);`
其中T2为3x4的[R|T]矩阵,left、right为相机坐标系下的归一化坐标,
因此不能直接使用提取到的像素坐标。应首先将像素坐标通过相机内参转化到相机坐标系下。
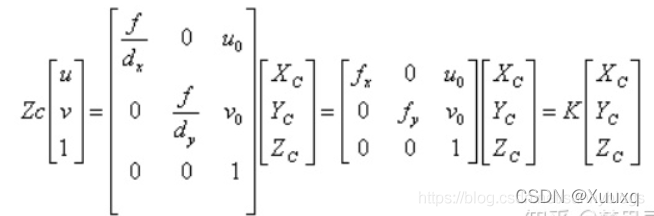
通过函数pixel2cam可将像素坐标转换到归一化相机坐标系下
归一化坐标:X=(u-u0)/fx
//像素坐标到归一化平面相机坐标的转换
Point2f pixel2cam(const Point2f& p, const Mat& K)
{
return Point2f
(
(p.x - K.at<double>(0, 2)) / K.at<double>(0, 0),
(p.y - K.at<double>(1, 2)) / K.at<double>(1, 1)
);
}


















 5818
5818





 到【灌水乐园】发言
到【灌水乐园】发言







