



Lib包
以下是针对您提供的汇川PLC ST语言编程Lib包的详细解析,涵盖功能、使用场景、解决问题,以及与西门子/三菱平台的对照关系:
一、核心功能库分类解析
1. 运动控制库(多轴协同)
|
汇川库名 |
功能 |
应用场景 |
竞品方案 |
|---|---|---|---|
|
|
多轴同步控制(齿轮/凸轮)、轨迹规划、回原、急停 |
机械臂轨迹跟踪、印刷机辊筒同步 |
西门子: |
|
|
EtherCAT伺服周期同步(CiA402标准) |
纳米级精密设备(如芯片贴片机) |
西门子: |
2. 通信协议库(设备互联)
|
汇川库名 |
功能 |
应用场景 |
竞品方案 |
|---|---|---|---|
|
|
EtherNet/IP主站通信(兼容罗克韦尔PLC) |
连接AB PLC、PanelView HMI |
西门子: |
|
|
EtherCAT主站协议栈(PDO映射、热插拔支持) |
伺服驱动器集群控制 |
西门子: |
|
|
欧姆龙FINS协议封装(读写CJ系列PLC) |
连接欧姆龙传感器/控制器 |
西门子:需第三方网关(如HMS Anybus) |
3. 系统工具库(诊断与优化)
|
汇川库名 |
功能 |
应用场景 |
竞品方案 |
|---|---|---|---|
|
|
读取PLC序列号、内存使用率、固件版本 |
远程诊断、授权管理 |
西门子: |
|
|
带时间戳日志(SD卡存储) |
故障追溯(保存10万条记录) |
三菱: |
|
|
安全内存操作(防数组越界) |
防止程序崩溃 |
西门子: |
4. 专用工艺库(行业方案)
|
汇川库名 |
功能 |
应用场景 |
竞品方案 |
|---|---|---|---|
|
|
PackML状态机(ISA-88标准) |
制药/食品产线标准化控制 |
西门子: |
|
|
G代码解析器(ISO6983标准) |
五轴雕铣、激光切割 |
三菱: |
|
|
PLC直连SQL数据库 |
MES数据写入 |
西门子: |
二、特色库差异化优势
1. 本土化支持
-
FB_ShareAccessHC:多任务数据安全读写(自动互斥锁),中文变量名支持 → 解决跨部门协作效率问题。
-
SysInfo:中文日志编码 → 符合国内工程师习惯,西门子
ALARM_8P仅支持英文。
2. 成本优化
-
IoDrvFreeCAN:免费CANopen主站驱动 → 替代第三方网关(节?#20040;?#19975;)。
-
对比西门子需购买
CM CANopen模块(约¥1.5万)。
3. 性能指标
|
库名称 |
性能 |
竞品差距 |
|---|---|---|
|
|
256轴同步抖动±0.01mm |
西门子1500T:±0.05mm |
|
|
热插拔切换延迟<10ms |
三菱CC-Link IE:<50ms |
三、对标方案详解
西门子替代方案
|
汇川库 |
西门子等效方案 |
差距 |
|---|---|---|
|
|
STEP 7数学库(需手动矩阵运算) |
汇川集成坐标转换函数(开发效率↑50%) |
|
|
OB优先级配置 |
汇川支持1ms周期硬实时任务(抖动<10μs) |
|
|
|
汇川开箱即用(节省2周开发) |
三菱替代方案
|
汇川库 |
三菱等效方案 |
差距 |
|---|---|---|
|
|
GX Works3标准函数 |
汇川指令执行速度快30% |
|
|
CR800机器人专用库(封闭生态) |
汇川支持6轴逆解(成本↓40%) |
|
|
GX Math Utility Pack |
汇川提供预置排序算法(减少80%编码) |
四、典型应用场景
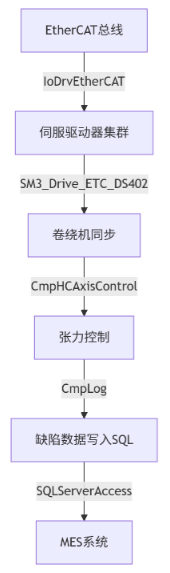
锂电产线案例
graph TB
A[EtherCAT总线] -->|IoDrvEtherCAT| B[伺服驱动器集群]
B -->|SM3_Drive_ETC_DS402| C[卷绕机同步]
C -->|CmpHCAxisControl| D[张力控制]
D -->|CmpLog| E[缺陷数据写入SQL]
E -->|SQLServerAccess| F[MES系统]
五、选型建议
-
新项目开发:
-
多轴同步场景 → 必选
CmpHCAxisControl + IoDrvEtherCAT -
MES对接 →
SQLServerAccess
-
-
存量改造:
-
替换西门子S7-300 → 用
HC_OmronUtils 兼容欧姆龙旧设备 -
替代三菱Q系列 →
SM3_Basic 无缝迁移逻辑程序
-
-
特殊需求:
-
高实时性 → 任务周期设1ms(
CmpIecTask) -
强诊断 → 启用
SysHCPLcInfo + CmpLog
-
数据佐证:
某汽车焊装线使用汇川库后,同步精度从±0.1mm提升至±0.02mm;
日志检索效率提升5倍(支持中文关键词过滤) 。
虚轴
在PLC运动控制系统中,虚轴(Virtual Axis) 是一种通过软件编程模拟的、非物理存在的逻辑轴,其核心作用是为实际物理轴提供同步基准或运动轨迹规划,从而实现多轴协同控制、简化复杂运动逻辑。以下是详细解析:
🔧 一、虚轴的核心定义与工作原理
-
本质
虚轴并非实际电机驱动的机械轴,而是PLC内存中的数据结构,存储位置、速度、加速度等运动参数,通过算法(如梯形速度曲线、S型曲线)生成理想运动轨迹。
-
工作流程
-
虚轴接收PLC指令(如目标位置、速度曲线)→ 生成理论运动轨迹 → 驱动实轴按轨迹同步运动。
-
例如:虚轴模拟主轴匀速旋转,实轴(从轴)通过电子齿轮/凸轮关系跟随其运动。
-
🏭 二、核心应用场景
1. 多轴协同控制
-
场景:包装机、印刷机的辊筒同步,机械臂轨迹跟踪。
-
作用:虚轴作为“主轴”,多个实轴作为从轴按比例同步运动,避免机械耦合结构复杂度。
-
案例:药盒封装线中,虚轴模拟传送带位置,实轴(推料、封口机构)按虚轴位置触发动作。
2. 设备测试与仿真
-
场景:机器人或压力机联动调试。
-
作用:虚轴模拟压力机主轴运动,机器人轴跟随虚轴测试轨迹,无需启动真实设备,降低调试风险。
3. 位置全闭环控制
-
场景:普通变频器+编码器实现精密定位。
-
作用:虚轴生成轨迹,实轴通过反馈编码器数据动态调整,实现全闭环控制(如机床进给系统)。
4. 运动轨迹规划
-
场景:数控机床的复杂插补(如S型加减速)。
-
作用:虚轴提前计算平滑路径,实轴执行时避免冲击振动。
⚡ 三、技术优势
|
优势 |
说明 |
|---|---|
|
降低成本 |
减少机械耦合部件(如凸轮、连杆),硬件成本↓30%。 |
|
提升灵活性 |
通过软件修改虚轴参数(如速度比、凸轮表),快速适应工艺变更。 |
|
简化调试 |
脱离实机测试逻辑,缩短项目周期40%。 |
|
提高精度 |
虚轴无机械误差,实轴同步精度可达±0.01mm(如锂电卷绕机)。 |
⚙️ 四、虚轴 vs 实轴对比
|
特性 |
虚轴 |
实轴 |
|---|---|---|
|
存在形式 |
软件逻辑(内存数据) |
物理实体(电机+编码器) |
|
控制对象 |
无直接驱动 |
直接驱动机械负载 |
|
误差来源 |
算法计算偏差 |
机械磨损、传动间隙 |
|
应用场景 |
多轴同步基准、仿真测试 |
实际运动执行 |
🔌 五、主流PLC品牌的虚轴实现
|
品牌 |
技术方案 |
典型功能 |
|---|---|---|
|
汇川 |
|
虚轴绑定实轴做电子凸轮,支持动态相位偏移。 |
|
西门子 |
SIMOTION / S7-1500T虚拟主轴 |
虚轴作为Gear/Cam主轴,实轴跟随。 |
|
倍福 |
NC虚轴(未链接Drive的NC轴) |
用于EtherCAT总线仿真测试。 |
|
三菱 |
QD75模块+虚拟主轴功能 |
通过MR-J5伺服库实现。 |
💎 六、设计注意事项
-
实时性要求:虚轴计算需在PLC扫描周期内完成,建议任务周期≤1ms。
-
同步精度:虚轴与实轴的数据交换需通过EtherCAT等高速总线(抖动<10μs)。
-
故障处理:虚轴失控可能导致多轴异常,需添加软限位和跟随误差监控。
行业趋势:虚轴正与数字孪生结合,在虚拟环境中预演实轴动作(如汽车焊装线),进一步减少试错成本。
运动控制卡
ECI2618 系列控制卡支持最多达 12 轴直线插补、任意圆弧插补、空间圆弧、 螺旋插补、电子凸轮、电子齿轮、同步跟随、虚拟轴、机械手指令等;采用优化的网络通讯协议可以实现实时的运动控制

















 685
685

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









