



声明:偶尔转载的文章出于非商业性的教育和科研目的,并不意味着支持其观点或证实其内容的实行,欢迎大家评论发表自己的意见。版权归原作者所有,如转载稿涉及版权等问题,请立即联系我们,我们会予以更改或删除相关文章,保障您的权利!一、自动驾驶行业发展背景
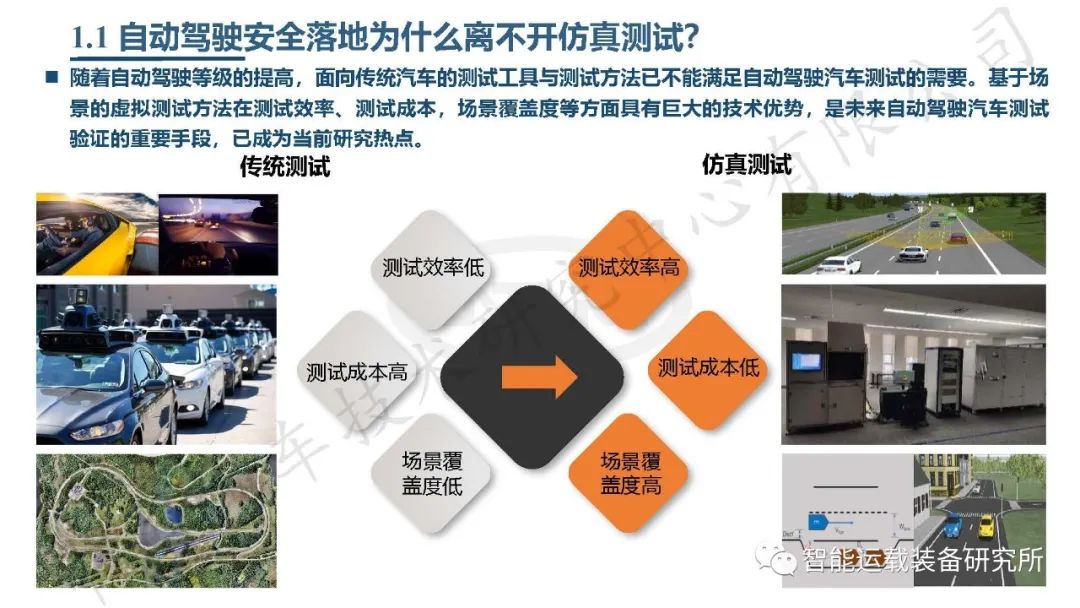
1.1 自动驾驶安全落地离不开仿真测试
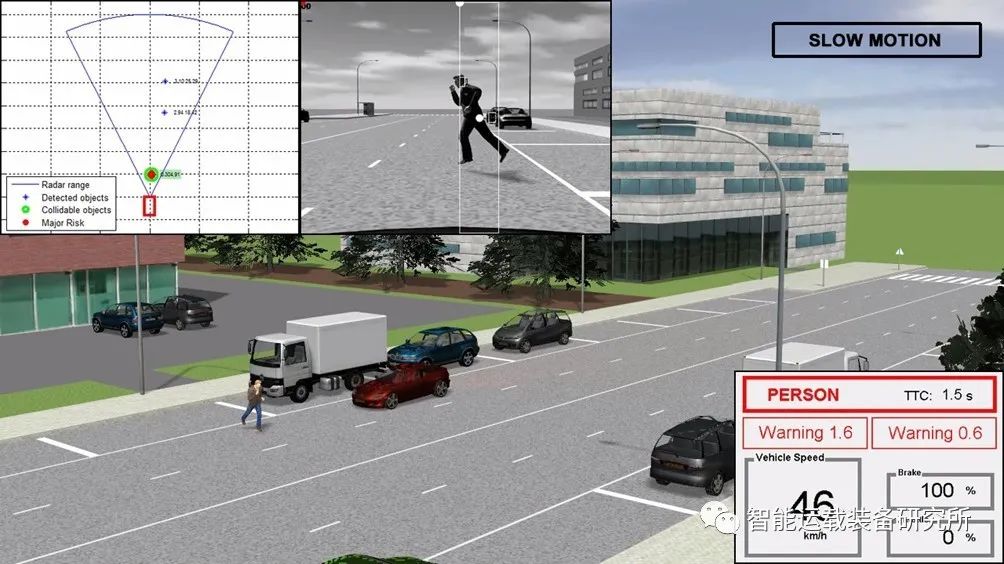
如果想让一辆Level 5级别的自动驾驶车辆正式上路,到底需要经过多少里程的测试?2016年兰德智库曾给出过答案:110亿英里。作为自动驾驶圈的领头羊,Waymo自动驾驶公开道路测试里程已突破1000万英里,然而这个里程离110亿英里的零头还差很远。基于场景的虚拟测试方法在测试效率、测试成本,场景覆盖度等方面具有巨大的技术优势,是未来自动驾驶汽车测试验证的重要手段,已成为当前研究热点。
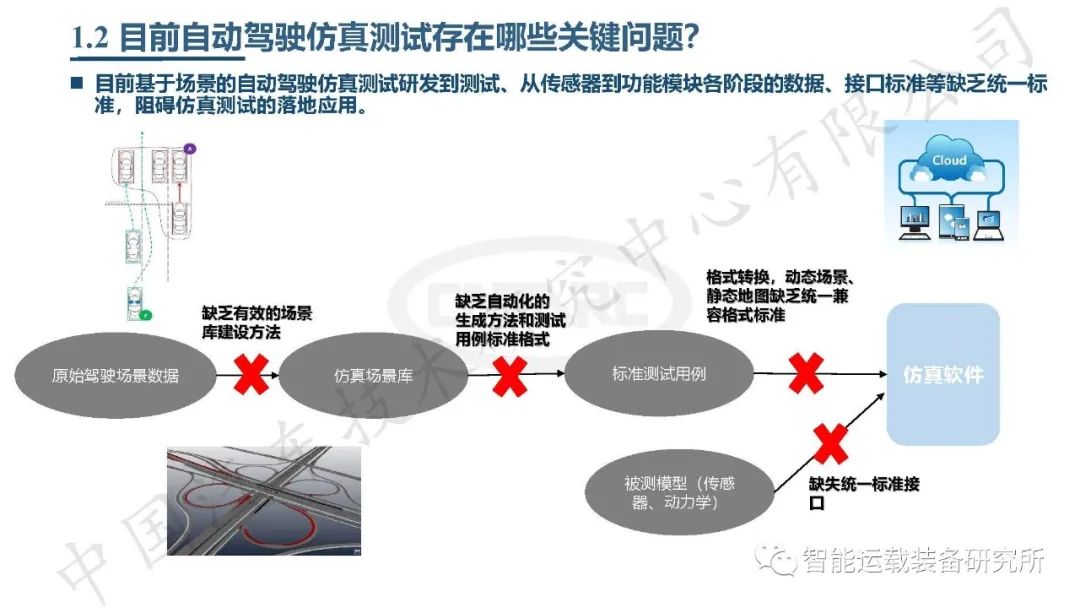
1.2 自动驾驶仿真测试存在哪些关键问题
目前基于场景的自动驾驶仿真测试研发到测试、从传感器到功能模块各阶段的数据、接口标准等缺乏统一标准,阻碍仿真测试的落地应用。
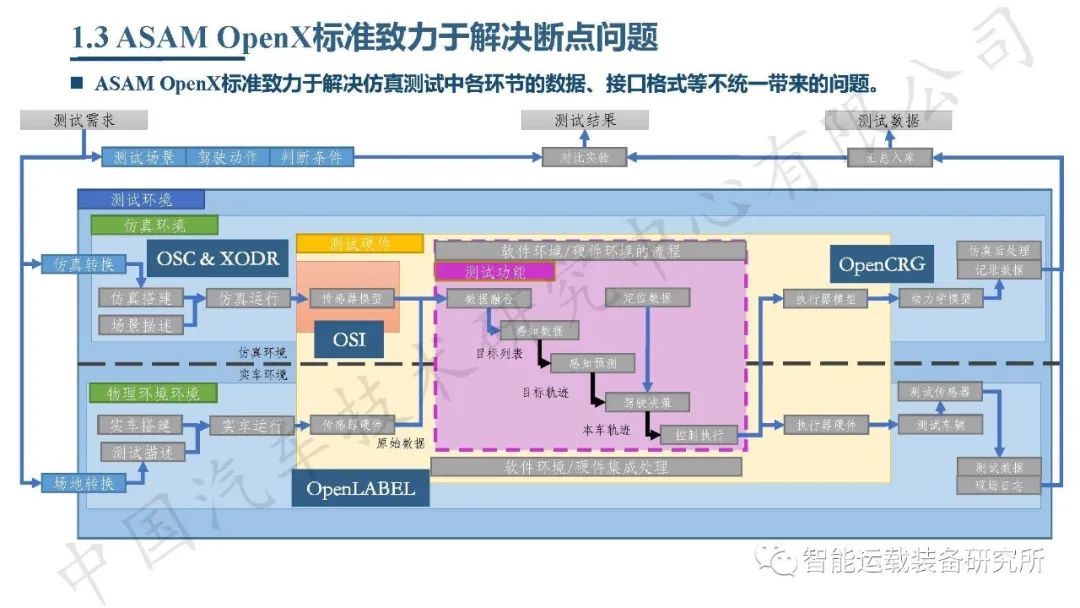
1.3 ASAM致力于解决断点问题
ASAM OpenX标准致力于解决仿真测试中各环节的数据、接口格式等不统一带来的问题。首先,我们要对测试场景、驾驶动作、判断条件进行描述,将这些信息输入到模拟环境之中,搭建起一个仿真场景。在对仿真运行环境进行调试之后,这些信息都会传输到测试硬件中进行融合和处理。
在设计这样的场景之前,除了要保证整个数据流被打通,还要在流程中的难点上得到反馈。比如记录相应的数据,以便判断仿真的内容是否符合测试的目的等。
其中,目前 ASAM 描述的关系就是仿真环境中的 OSC 和 XODR,一个针对地图信息,一个针对场景信息。针对传感器信息的为 OSI,标记数据传感器硬件为 OpenLABEL;除此之外还有 OpenCRG等。
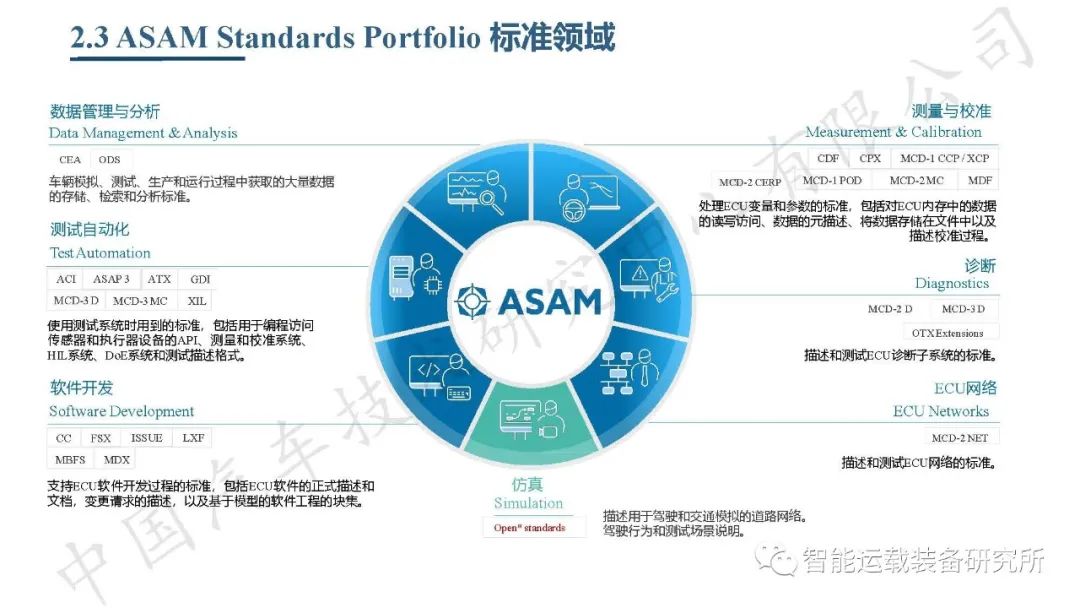
ASAM仿真格式整体标准包括以下五个方面:
(1)OpenDRIVE对应静态地图场景,负责描述地图信息,包括高精地图信息;
(2)OpenCRG对应道路表面,专注于车辆动力学,以及车辆对路面信息的反馈;
(3)OpenSCENARIO对应动态行为场景,也就是描述自动驾驶的测试场景;
(4)OSI对应仿真接口,比如传感器仿真接口或是各种信息的仿真接口;
(5)OpenLABEL研究的是场景标签与传感器原始数据。
二、ASAM标准助力仿真测试发展
2.1 ASAM发展
受汽车行业需求的驱动,OpenX标准在1998年由德国主要整车厂创建,愿景是创建一个工程、模拟、测试和自动化环境,在此环境中,设备和软件应用程序可以自由互联,数据可以无缝交换,为汽车行业制定、提高和推广标准提供平台,目前已有26个标准。
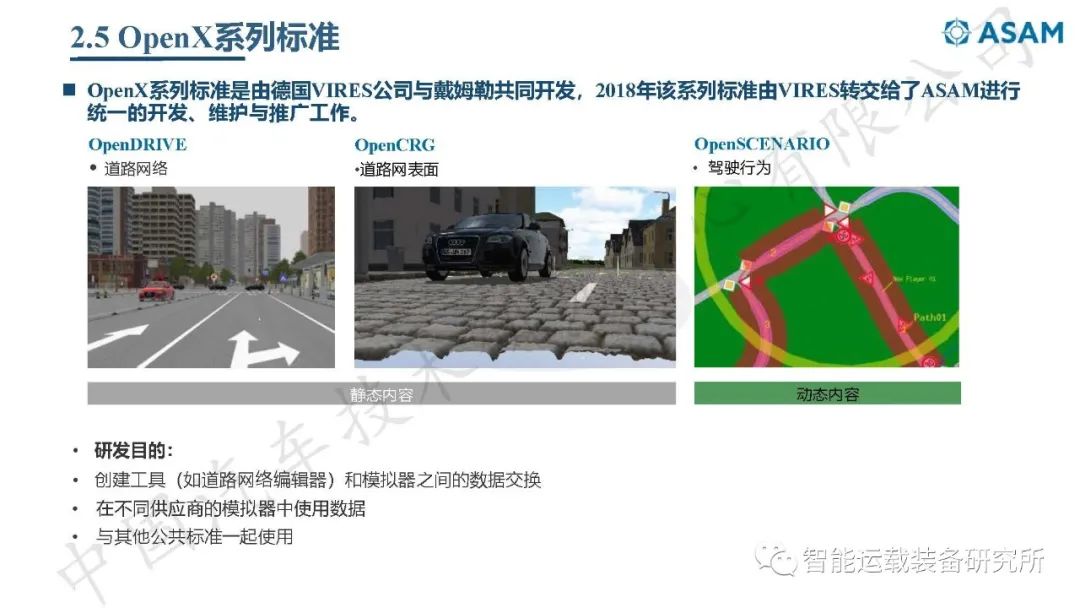
作为一个完整的仿真测试场景描述方案,OpenX系列标准包括:OpenDRIVE、OpenSCENARIO和OpenCRG。仿真测试场景道路网络部分(如道路拓扑结构、交通标志标线等)由OpenDRIVE文件描述,道路的表面细节(如坑洼、卵 石路等)由OpenCRG文件描述,仿真测试场景的动态部分(如交通车的驾驶行为)由OpenSCENARIO文件描述。
2.2 OpenDRIVE
2.2.1 OpenDRIVE简介
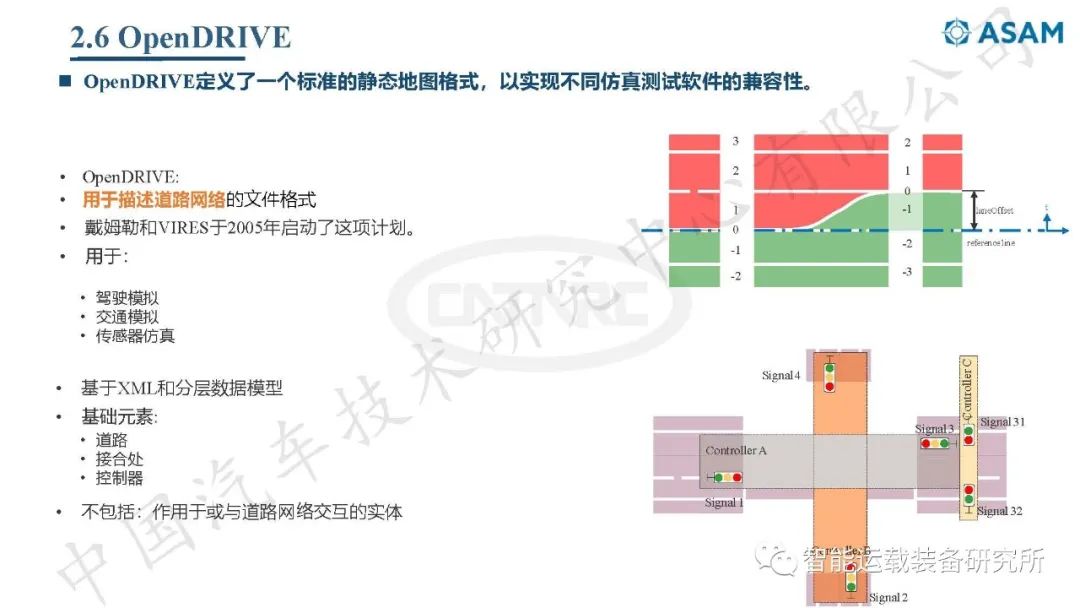
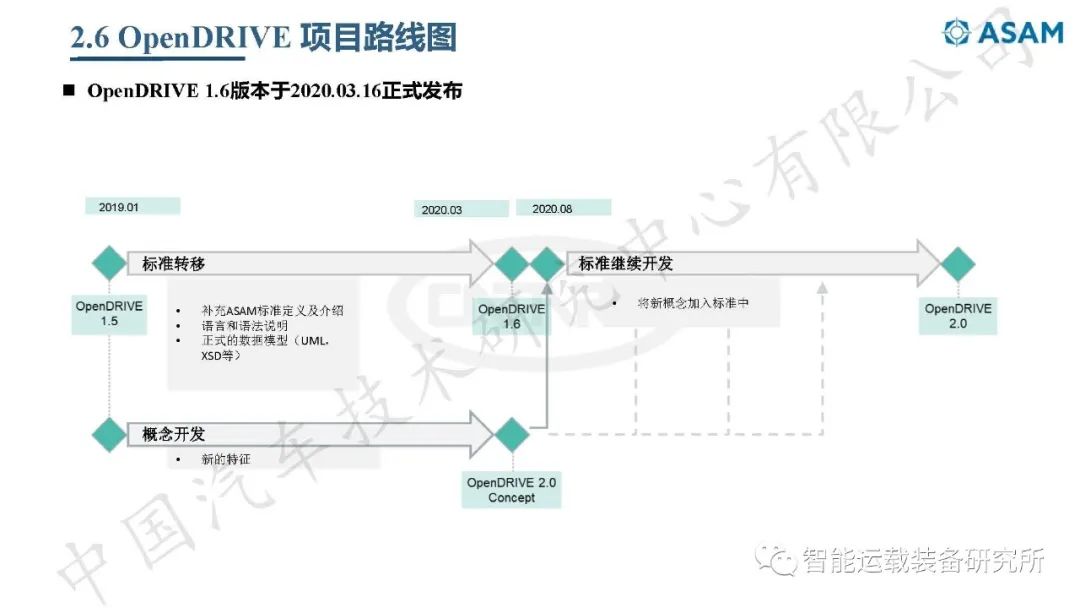
OpenDRIVE定义了一个标准的静态地图格式,以实现不同仿真测试软件的兼容性。2006年由德国VIRES公司发布,并反复的迭代,OpenDRIVE 1.5版本于2019年发布。2018年9月,OpenDRIVE的开发团队将维护工作转交给德国ASAM标准化组织,1.6及之后的版本由ASAM负责。
OpenDRIVE开发起因是VIRES公司在提供驾驶模拟器方案时,发现不同工具的道路数据格式中需要包含逻辑内容是基本一致的,为了方便在不同的驾驶模拟器间进行道路数据的传递,VIRES公司与Daimler Driving Simulator部门决定开发OpenDRIVE格式。转交给ASAM组织后,ASAM组织同样把OpenDRIVE定位为用于仿真测试的地图格式。
OpenDRIVE文件按XML格式编写,文件扩展名为.xodr。
2.2.2 OpenDRIVE道路信息
OpenDRIVE将道路分为了三个部分:道路参考线(reference line)、车道(lanes)和道路设施(features)。除此以外,还可以设置道路的高度(elevation),对于多条道路汇聚的位置需要用路口(junctions)来描述。
(1)道路参考线
道路参考线可以理解为道路中心线在水平面的投影,也就是说道路参考线反映的是道路俯视的形状,而不包括坡度、起伏等特征。每条道路有且仅有一条道路参考线,该参考线可以有多条曲线连接而成,这些曲线的形式包括:直线、螺旋线、圆弧、和三次多项式参数方程等。
(2)车道
每条道路都可以设置大于等于一条车道,可以有多条车道,还可以通过设置不同的车道分段来实现不同区域的车道数量和车道宽度的变化。
车道可以设置不同的属性,包括:宽度、类型(如行车道、停车区域、行人道等)、材质(包括摩擦系数)、限速、路权(可以设置公交专用道)、车道线等。
(3)道路设施
道路设施包括物体(objects)和交通信号(signals)两种。
(4)道路高度
道路的高度包括纵向坡度(即沿行驶方向的高低起伏)、超高(即道路横向的坡度,例如转弯处外侧较高),甚至可以设置横向复杂的形状(如路面中间凸起便于排水的形状)。
(5)路口
当三条及以上道路相交、无法清楚描述道路的连接关系时,需要用到路口。路口由三个部分组成:来路(incomingroads)、去路(outgoing roads)和连接路(connectingroads)组成。
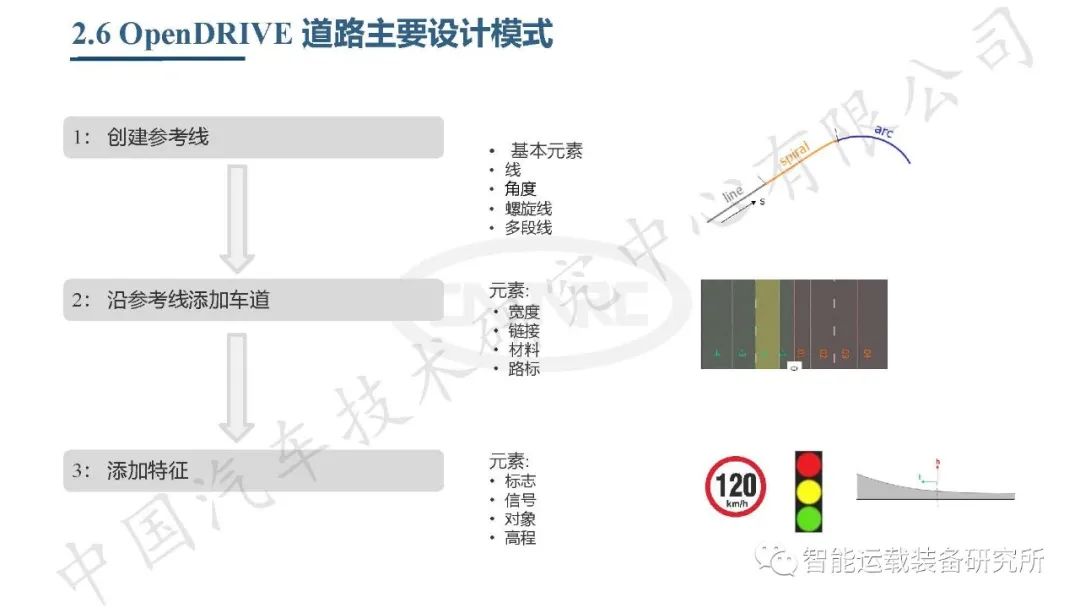
2.2.3 OpenDRIVE主要设计模式
创建参考线:线、角度、螺旋线、多段线
沿参考线添加车道:宽度、链接、材料、路标
添加特征:标志、信号、对象、高程
2.3 OpenCRG
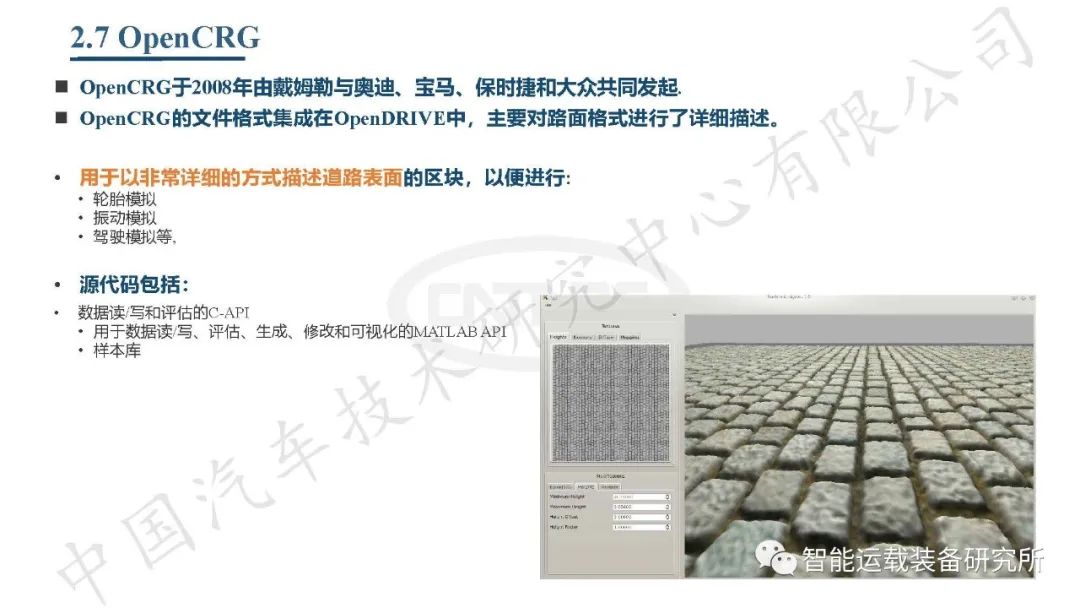
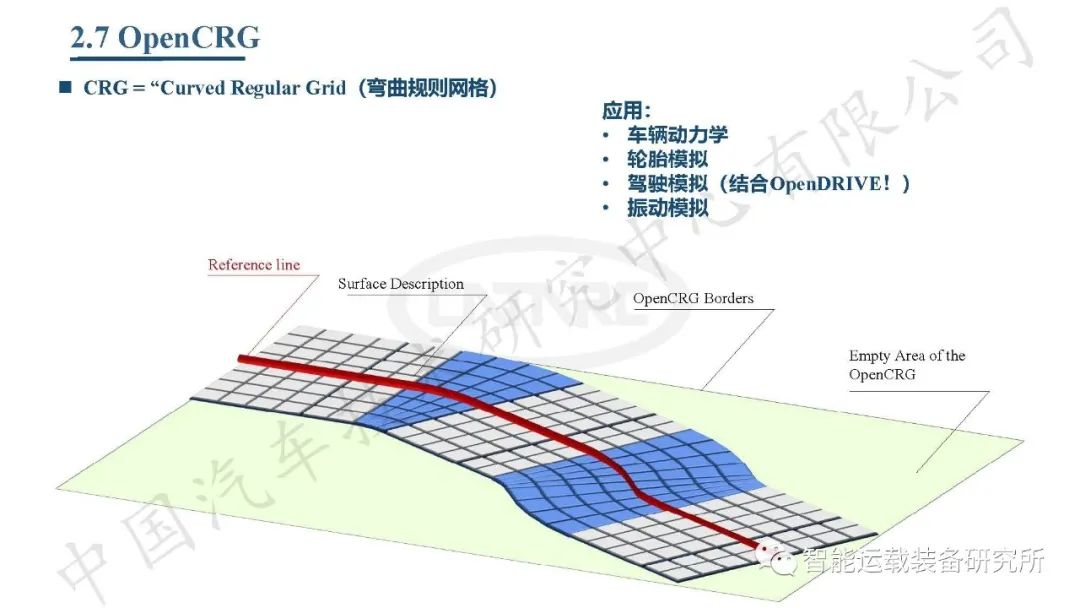
OpenCRG于2008年由戴姆勒与奥迪、宝马、保时捷和大众共同发起.OpenCRG的文件格式集成在OpenDRIVE中,主要对路面格式进行了详细描述。
用于以非常详细的方式描述道路表面的区块,以便进行:轮胎模拟、振动模拟、驾驶模拟等。
2.4 OpenSCENARIO(OSC)
2.4.1 OpenSCENARIO介绍
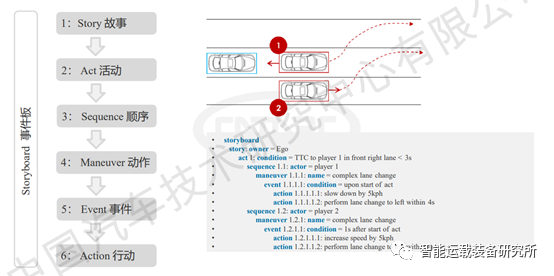
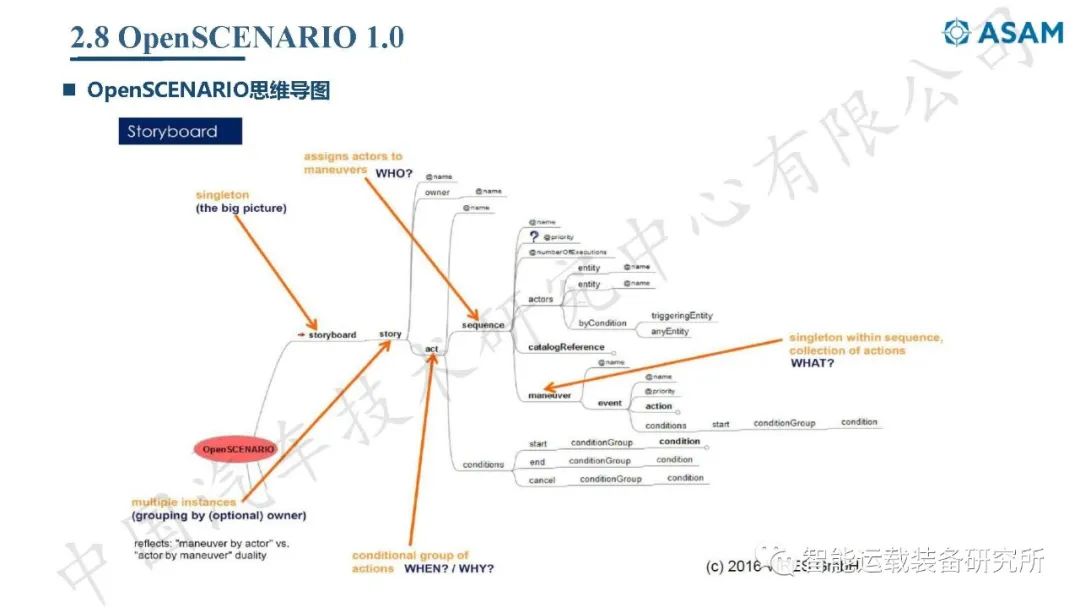
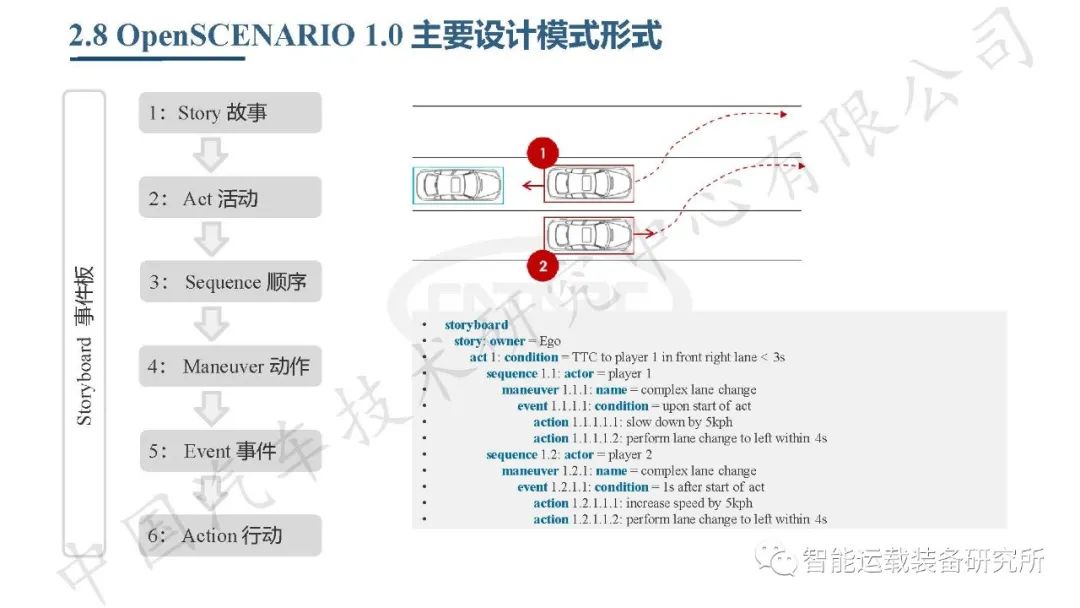
OSC场景简单描述就是:谁什么时候在哪儿干什么。在描述的过程中还涉及非常具体的分层结构,比如,在完整的场景描述中,从故事、幕、动作组合、动作、事件,再到相应行动的触发和执行。
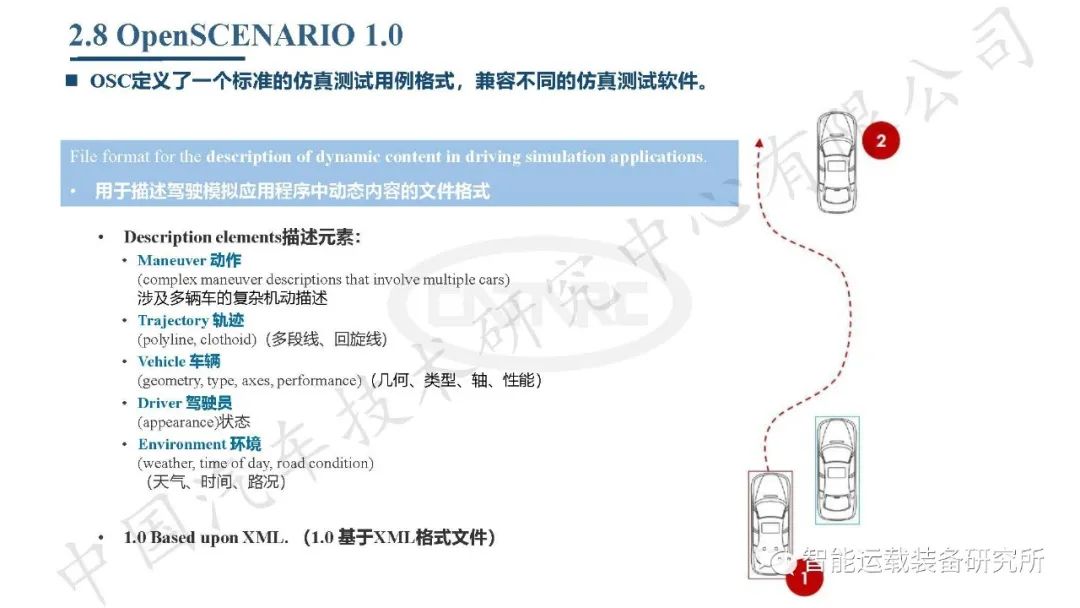
OSC定义了一个标准的仿真测试用例格式,兼容不同的仿真测试软件。
描述元素(Description elements):
动作(Maneuver):涉及多辆车的复杂机动描述(complex maneuverdescriptions that involve multiple cars)
轨迹(Trajectory):多段线、回旋线(polyline, clothoid)
车辆(Vehicle):几何、类型、轴、性能(geometry, type, axes,performance)
驾驶员(Driver):状态 (appearance)
环境(Environment):天气、时间、路况 (weather, time of day,road condition)
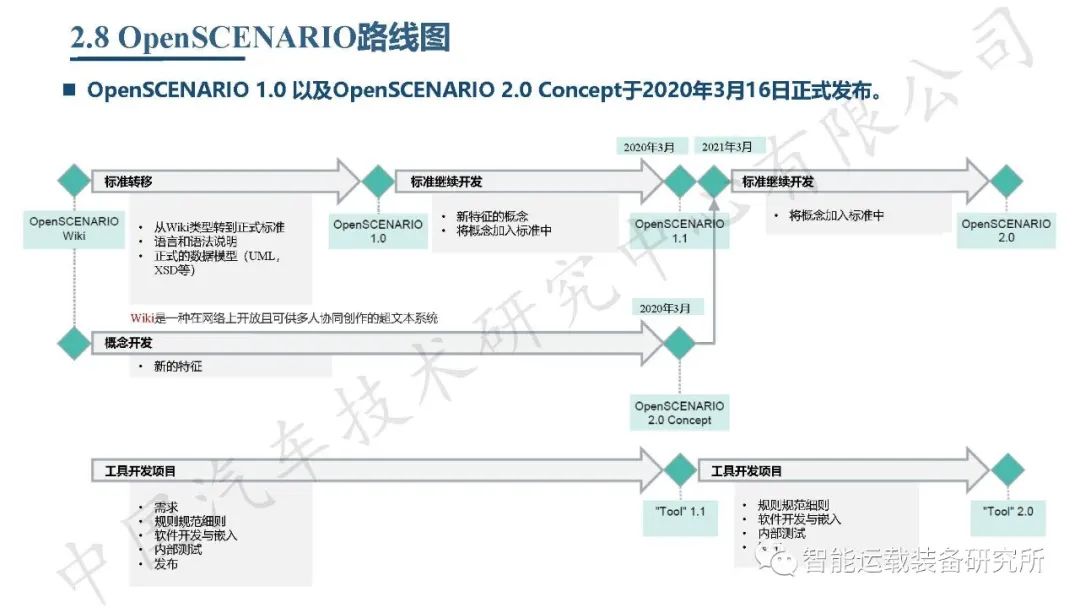
2.4.2 OpenSCENARIO 1.0 主要设计模式形式
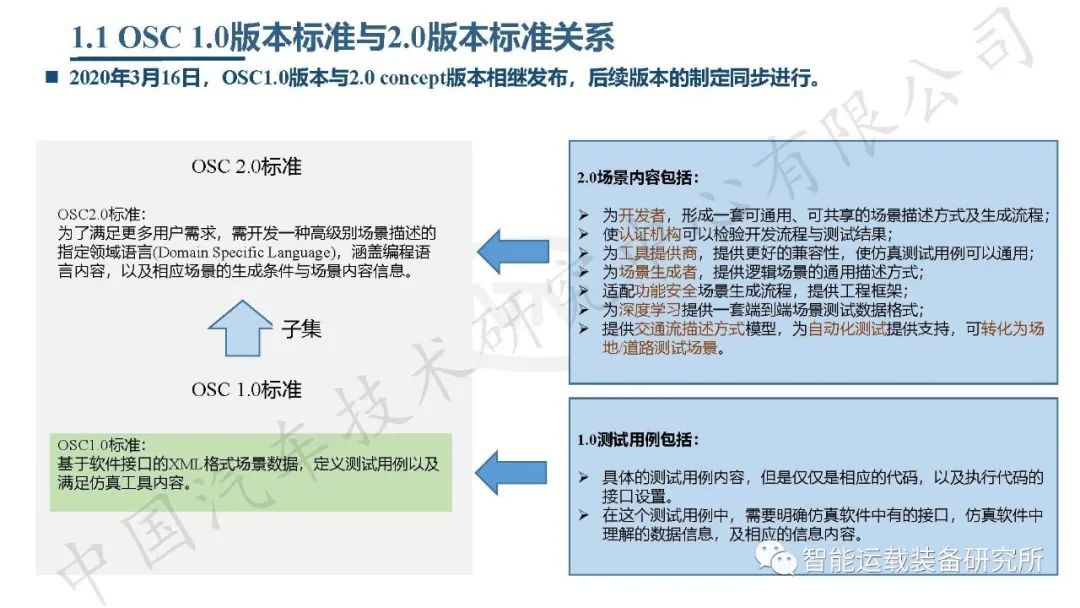
2.4.3 OSC2.0版本的发布
OSC2.0标准:为了满足更多用户需求,需开发一种高级别场景描述的指定领域语言(DomainSpecific Language),涵盖编程语言内容,以及相应场景的生成条件与场景内容信息。
2.0场景内容包括:
(1)为开发者,形成一套可通用、可共享的场景描述方式及生成流程;使认证机构可以检验开发流程与测试结果;
(2)为工具提供商,提供更好的兼容性,使仿真测试用例可以通用;
(3)为场景生成者,提供逻辑场景的通用描述方式;
(4)适配功能安全场景生成流程,提供工程框架;
(5)为深度学习提供一套端到端场景测试数据格式;
(6)提供交通流描述方式模型,为自动化测试提供支持,可转化为场地/道路测试场景。
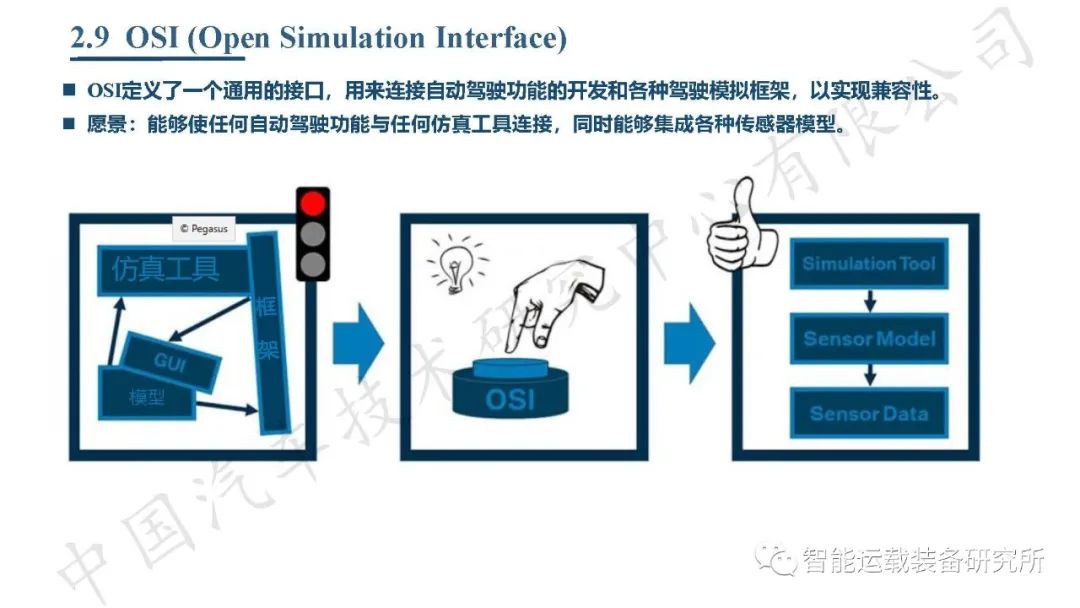
2.5 OSI (Open Simulation Interface)
2.5.1 OSI简介
OSI定义了一个通用的接口,用来连接自动驾驶功能的开发和各种驾驶模拟框架,以实现兼容性。希望能够使任何自动驾驶功能与任何仿真工具连接,同时能够集成各种传感器模型。
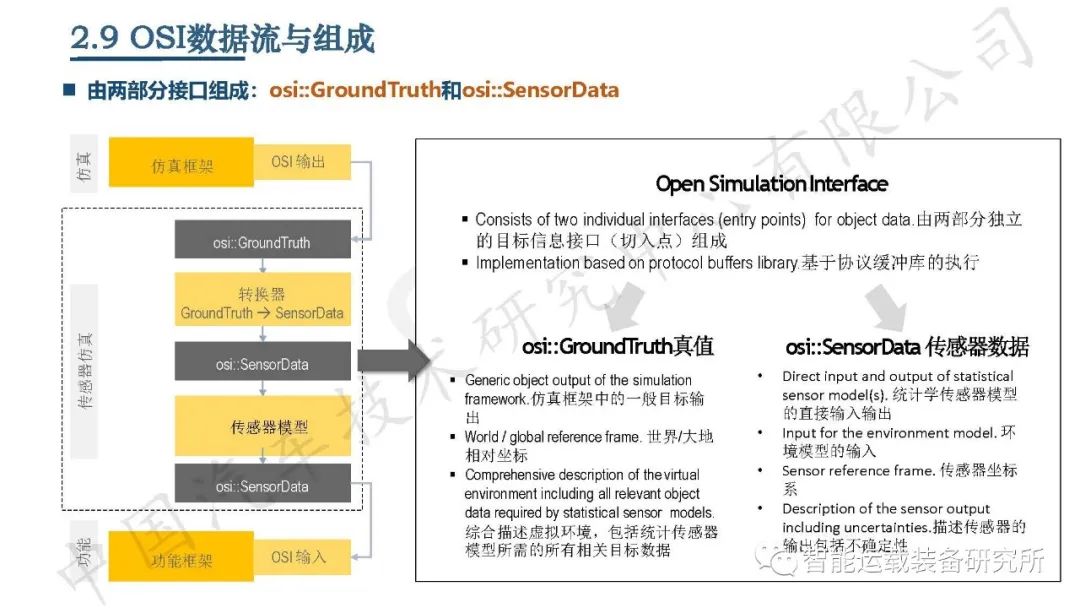
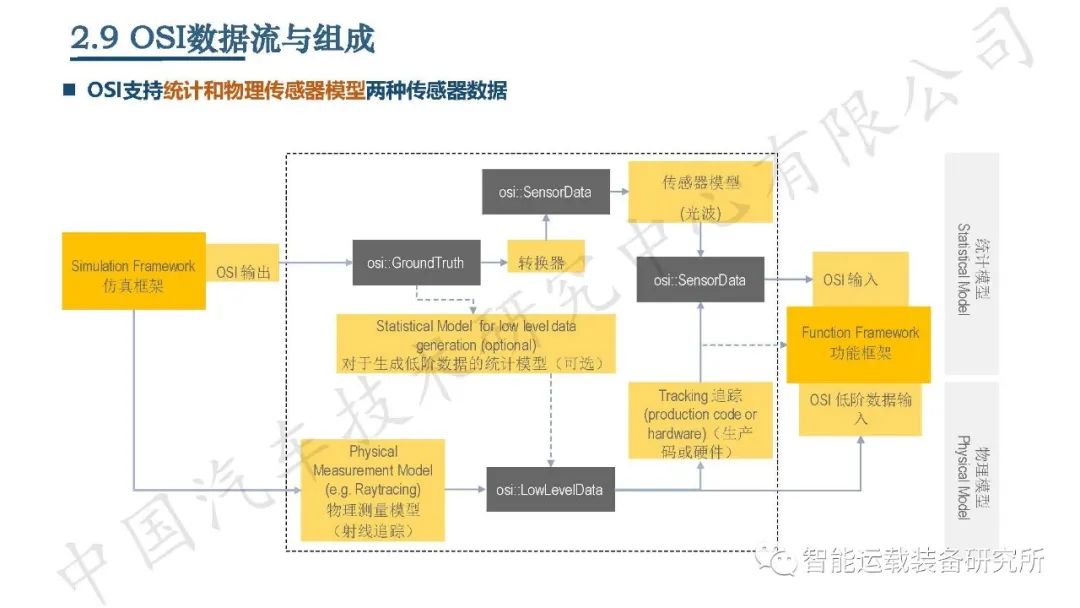
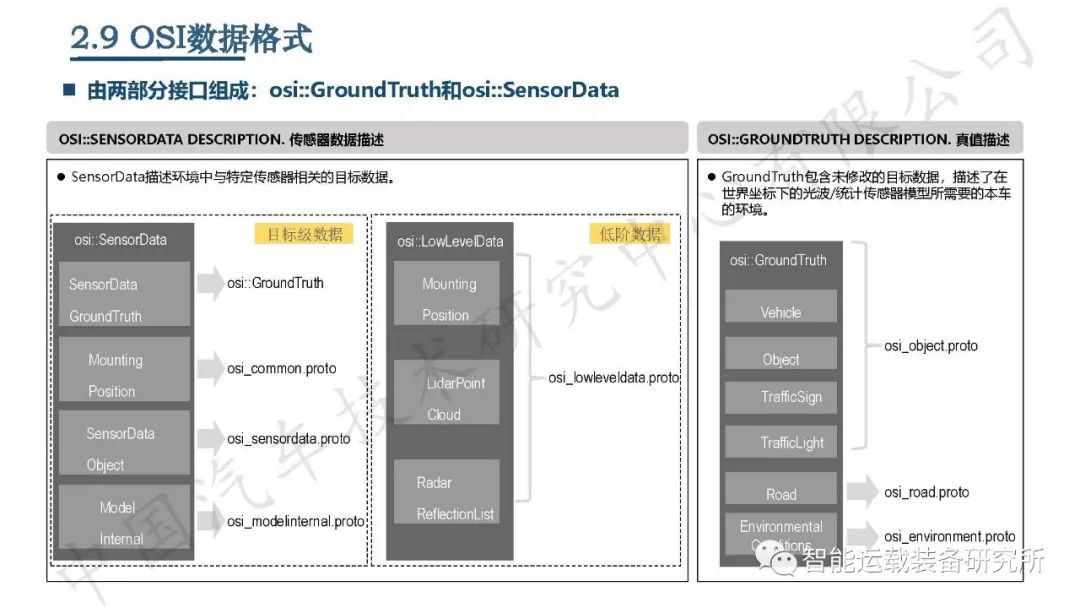
OSI由两部分独立的目标信息接口组成,即真值和传感器数据;支持统计和物理传感器模型两种传感器数据。
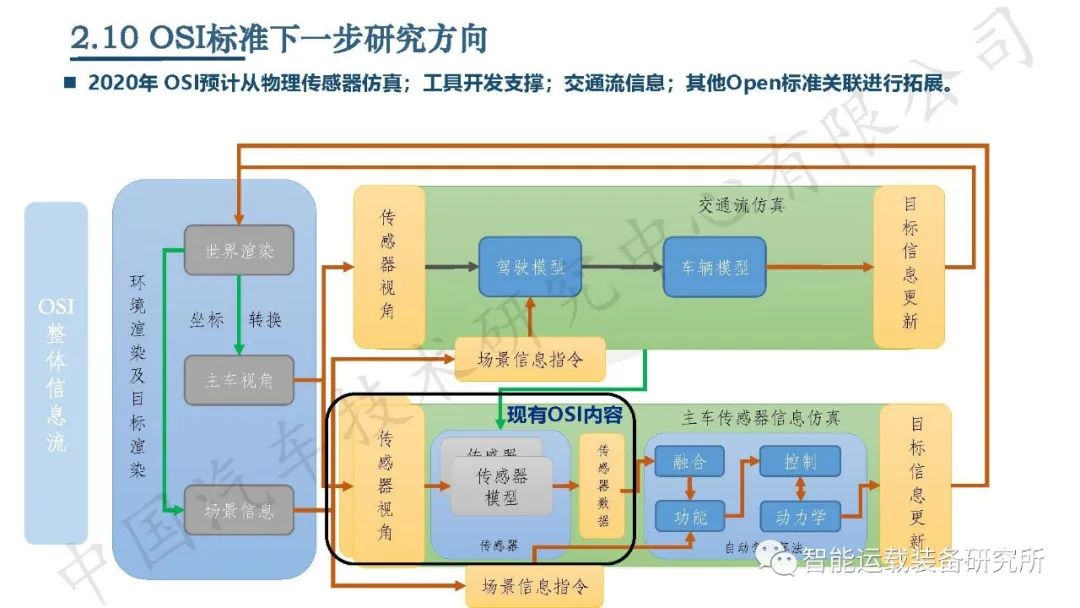
不过,目前OSI的研究内容并不能够完全满足自动驾驶仿真测试的需求,而是需要一个更加完整的体系,因此,OSI将会从屋里传感器仿真、工具开发支撑、交通流信息、其他Open标准关联进行拓展。
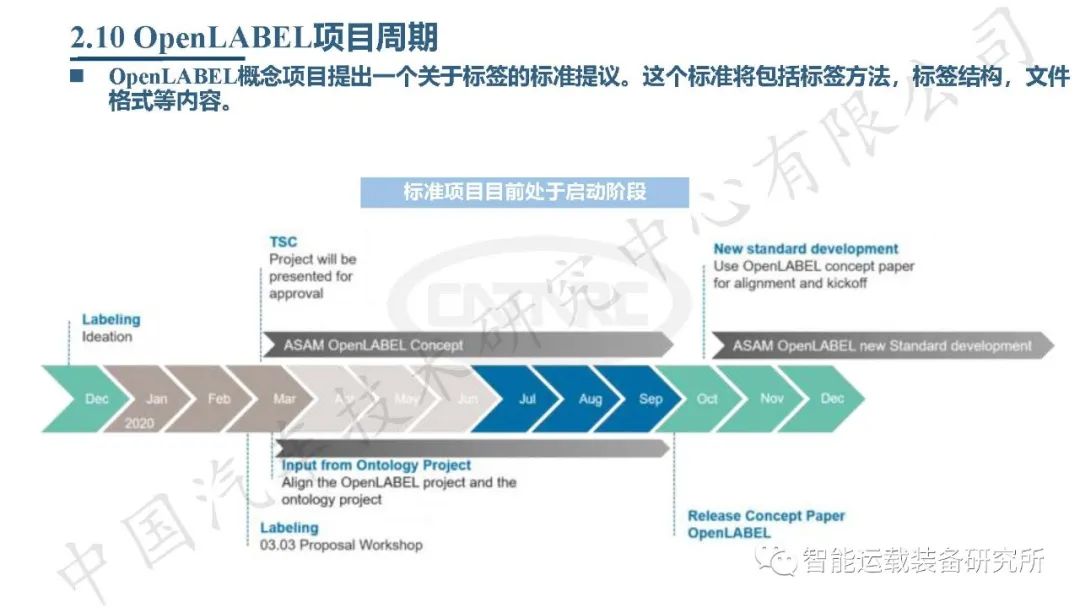
2.6 OpenLABEL
OpenLABEL 概念项目提出了一个关于标签的标准提议,这个标准将包括标签方法,标签结构、文件格式等内容,旨在解决不同厂商之间数据无法互通的痛点。不过,这一项目2019年年底才开始推动,目前正处于推广阶段。





























 691
691

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









