




绪论
信息对抗: 分为雷达电抗、通信对抗、网络对抗、光电对抗
RADAR radio detection and ranging
电磁波的散射——其中的反射部分,可以获得角度速度距离以及形状的信息
雷达的组成
天线
发射机
接收机
信号处理机:提取目标的各种信息
终端显示设备
伺服系统、同步系统
1.连续播信号
注意包络信号只是上端有
表示单位时间内波的周期的个数
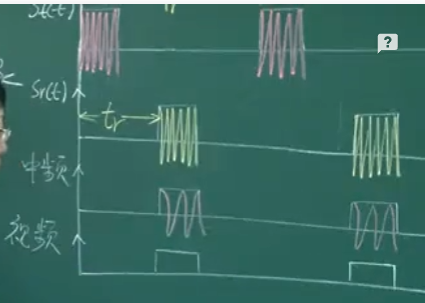
射频——中频——视频
目标参数的测量
1.坐标系
球坐标
以雷达为球心 目标到雷达的距离是,R
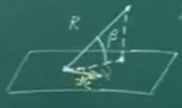
是方位角——反应水平面角度的变化,范围是360度,
是俯仰角——反应空间角度的变化,假设往上为正,往下为负,则范围【-90°,90°】
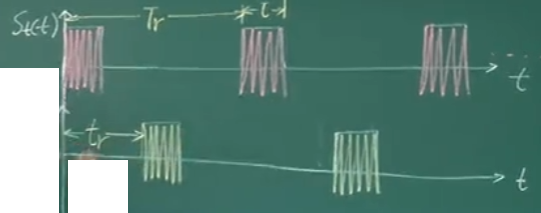
距离测量——脉冲法,当然连续波也可以测距
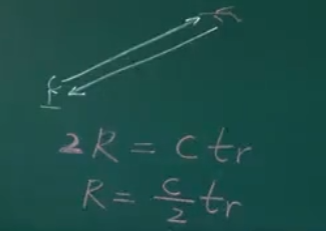
是时延,是主波和回波之间的时间差,c为光速,
为1ms,R为150km;
为1us,R为150m。
若大于
,可能会引起距离模糊
距离单位需要清楚
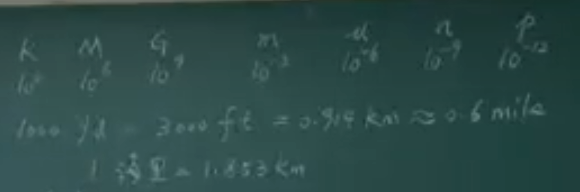
1. 较大数量级(从左至右)
| 手写符号 | 对应的数值 | 英文词头 | 中文含义 | 常用示例 |
| k | $10^3$ | kilo | 千 | km (千米), kg (千克) |
| M | $10^6$ | Mega | 兆 (百万) | MB (兆字节), MHz (兆赫兹) |
| G | $10^9$ | Giga | 吉 (十亿) | GB (吉字节), GHz (吉赫兹) |
2. 较小数量级(从左至右)
| 手写符号 | 对应的数值 | 英文词头 | 中文含义 | 常用示例 |
| m | $10^{-3}$ | milli | 毫 | mm (毫米), mg (毫克) |
| $\mu$ (写得像 $u$) | $10^{-6}$ | micro | 微 | $\mu$m (微米), $\mu$s (微秒) |
| n | $10^{-9}$ | nano | 纳 | nm (纳米), ns (纳秒) |
| p | $10^{-12}$ | pico | 皮 | pm (皮米), pF (皮法拉) |
角度测量
基本条件——电磁波是直线传播;雷达天线具有方向性
电磁波在均匀的介质中是直线传播,但在大气中接近地面的部分可认为是均匀的,
雷达天线分为两类:各向异性天线(有方向性天线)
各向同性天线(无方向性天线)。
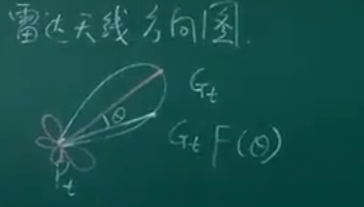
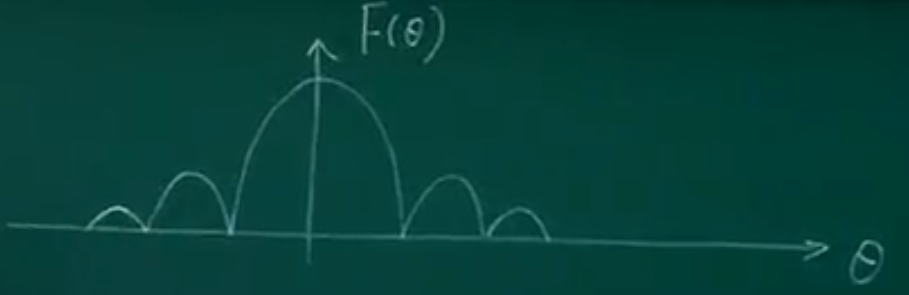
雷达天线方向图——极坐标——只含角度和径长两个参数:它指得是有方向性天线相对于无方向性天线来说,在某个方向上功率增加的倍数
是发射机的发射功率,t代表transform.
是天线方向图的最大值
主瓣单调性,偏离最大值角度越大,增益越小
在直角坐标系下:
需要注意的是,角度是有范围的,即360°。
在主瓣范围内,增益一般是大于1的,负瓣范围内,增益是小于1的。所以主瓣方向上功率的增强,是牺牲了负瓣方向上的增益
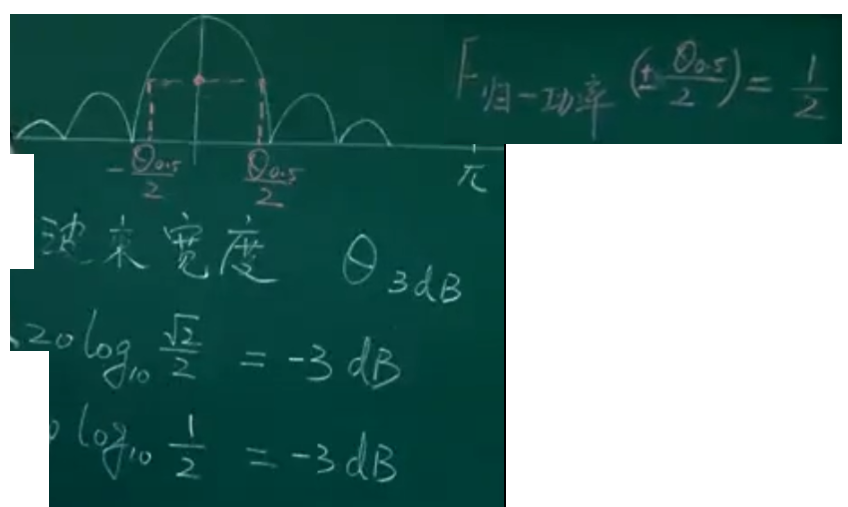
天线方向图的波束宽度——单位是 ,
, ,
,
3dB,真值与分贝
,这个电压、幅度是分贝和真值的转换
,,功率增益使用的这个
衡量主瓣宽度,使用。怎么测量
——给定天线方向函数图后,在纵坐标
取1/2对应出来的角度差值的差值,
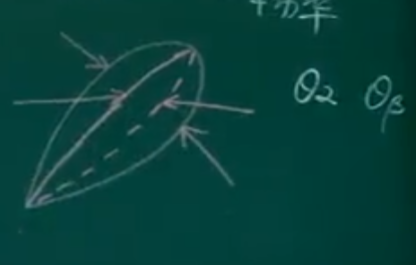
空间方向上的增益,真正的天线方向图是一个立体状的
天线收发互易
目标速度的测量
多普勒效应——雷达本身的回波信号的频率和主波发射信号的频率,当目标如果运行的话,有径向运动,这两个频率会存在频率差,即多普勒频率
对于固定目标
频率本质上是瞬时相位的导数,是它相对于时间的导数。求导后得到
,是个瞬时角频率,再除以
得到瞬时频率。即
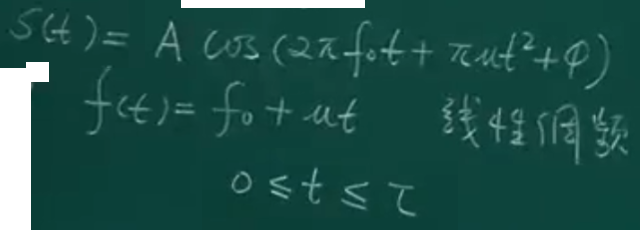
线性调频信号
u是调谐率



















 1532
1532

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









