




雷达发射机原理与任务
一、 引言:从概论到发射机
在上节课中,我们完成了第一章内容的学习,主要涵盖了雷达概论,包括雷达测距、测角、测速的原理,雷达成像的各个方面,以及基本的雷达方程。我们了解到,雷达的工作过程是:发射机产生电磁波,经天线辐射到空间照射目标,目标反射回波信号被雷达接收机接收,进而对目标信息进行处理。
这节课我们将进入第二章的学习——雷达发射机。发射机是雷达系统中极其重要的组成部分。本章将重点讲解雷达发射机的工作原理。
二、 雷达发射机的任务与基本组成 (2.1节)
首先,我们探讨雷达发射机的核心任务。归纳起来,其主要任务可以概括为一句话:
产生大功率、特定调制的射频信号。
这句话包含三个关键要素:射频信号、大功率、特定调制。下面我们将逐一进行详细解析。
1. 射频信号 (RF Signals)
雷达发射机发射的必然是射频信号(Radio Frequency),即雷达电磁波在空间传播时所承载的高频频率。
-
发射与接收的一致性:
-
发射机发射射频信号到空间,照射目标后反射回来,接收机在天线口面接收到的信号依然是射频信号。
-
-
信号处理流程:
-
由于射频信号频率过高(如 10GHz),若直接进行数字处理,根据奈奎斯特采样定理(采样频率需大于信号最高频率的2倍),现有的硬件水平难以实现如此高的采样率(如 20GHz)。
-
解决方案:通过混频装置将射频信号下变频到中频(IF)(例如几十 MHz),便于采样;再经过包络检波得到视频信号。这对应了第一章讲过的“射频 -> 中频 -> 视频”的处理流程。
-
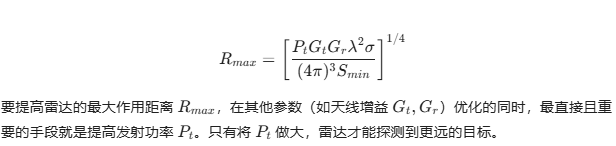
2. 大功率 (High Power)
为什么发射机需要具备大功率?这需要回顾雷达方程:
3. 特定调制 (Specific Modulation)
所谓的“特定调制”,主要包含振幅调制和频率调制两个方面。
(1) 振幅调制
对于雷达而言,最典型的振幅调制分为两类:

(2) 频率调制
除了发射简单的脉冲,为了满足特殊需求,雷达往往还需要对信号频率进行调制。常见的频率调制方式包括:
-
不调制(固定载频):最简单的形式,脉冲内频率固定。
-
频率分集:对同一目标发射不同载频的信号进行探测。
-
频率编码/相位编码:
-
频率编码:将一个宽脉冲分为若干子脉冲,每个子脉冲的载频不同。
-
相位编码:将宽脉冲分为若干子脉冲,每个子脉冲的初始相位发生变化。
-
-
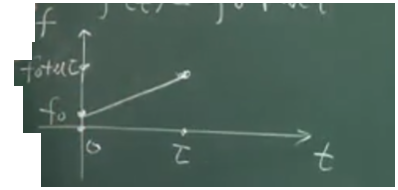
线性调频 (LFM / Chirp)
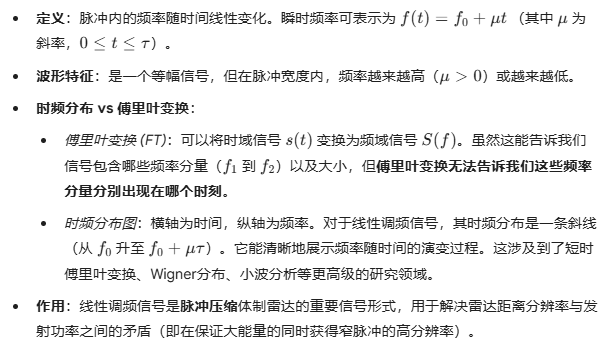
时频分布图
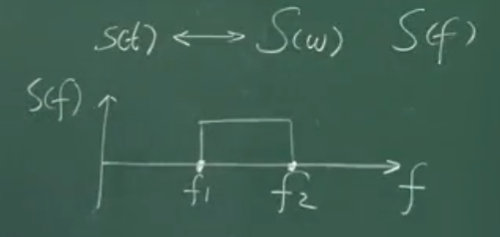
傅里叶变换
-
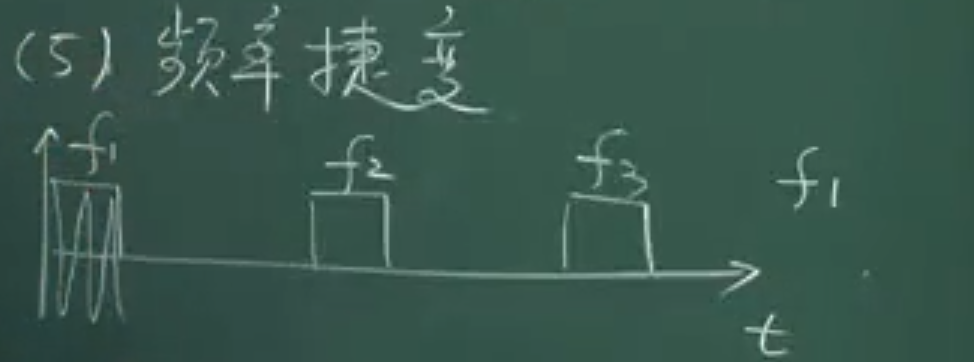
频率捷变 (Frequency Agility)
雷达与干扰机的工作机制
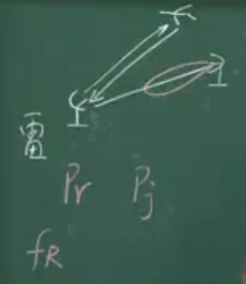
雷达通过发射电磁波照射目标,并接收回波来探测目标。当存在干扰机时,其工作原理如下:
-
雷达的操作:雷达发射电磁波到目标,然后接收反射回来的信号以分析目标信息。
-
干扰机的作用:干扰机试图向雷达发送非目标反射的信号,以混淆雷达的真实信号。干扰机有自己的天线,用于发射电磁波,这些电磁波通过特定方向图函数对准雷达。
-
雷达接收到的两种信号:
- 真实的回波信号(PR),这是雷达方程中提到的目标反射回来的信号。
- 干扰信号(PG),由干扰机发出,意图掩盖或欺骗雷达系统。
雷达在处理这两种信号时,真实回波信号更易于分析目标的各种性质;而混杂了干扰信号的数据则难以分析。
为了对抗这种干扰,雷达采用以下策略:
-
使用特定射频频率:雷达有固定的发射频率FR。例如,3公分雷达的实际载频为10GHz左右。如果干扰信号不在雷达接收机的通带范围内(比如50MHz范围),那么干扰信号将无法进入雷达接收机。
-
抗干扰措施:干扰机需要准确测量雷达的发射频率才能有效干扰。为此,干扰机会配备侦察天线,用来接收并分析雷达发射的电磁波,从而确定雷达的发射频率,并据此发出干扰信号。
为了进一步增强抗干扰能力,雷达可以采取“频率节变”技术,即每个脉冲发射不同的频率信号,使得干扰机难以准确测量和追踪雷达的真实载频。这种方法能够有效地增加对方侦测系统的难度,从而达到抗干扰的目的。
雷达信号的相参性与发射机组成
1. 信号的截取与相参性的概念
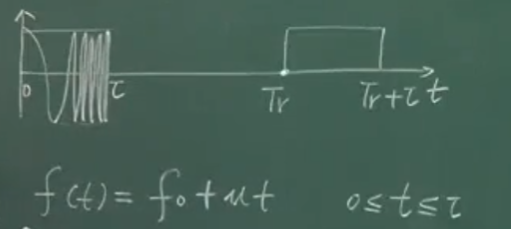
我们首先来看一下信号的时间关系。假设这里有一个连续的振荡信号,我们按照脉冲宽度 $\tau$ 对其进行截取,也就是把这一段时间的信号保留下来。接着,经过一个脉冲重复周期 $T_R$ 后,我们再截取一段信号。以此类推,后面的时间段也同样处理。
现在大家看,我们得到的信号(图示中红框内的部分)中间有空白间隔,只包含了被截取出来的脉冲部分。从波形外观上看,如果忽略中间的空白,这个被截取的信号与我们之前提到的普通脉冲信号看起来非常类似。
但是,实际上这两个信号有着本质的区别:
-
相位相参信号:刚才通过截取连续波得到的信号,其脉冲与脉冲之间是耦合的、有联系的。也就是说,如果我们知道了第一个脉冲的相位,后续脉冲的相位是可以唯一计算出来的。这种信号,我们称之为相位相参信号。
-
非相参信号:看似波形相同,但如果脉冲之间的相位没有确定的关系,无法互相推导,则是非相参信号。
2. 雷达发射机的两大基本组成形式
接下来我们要讲第二个大问题,即雷达发射机的两种主要组成形式,它们分别对应产生上述两种不同的信号:
-
单级振荡式发射机:
-
它主要用于产生非相参(老师口误为“飞翔仓”)的脉冲发射信号。
-
特点:实现起来比较简单,只要求频率相等,对精度的要求不高。
-
-
主振放大式发射机:
-
它用于产生相位相参信号。
-
特点:实现难度更大,比单级振荡式复杂得多。它要求有一个非常稳定的固态微波源,只有这样才能把相位牢牢地“卡住”(锁定),保证相位的稳定性。
-
优势:虽然复杂且精度要求高,但它便于后续进行各种复杂的信号处理。
-
3. 为什么需要相位相参?(以多普勒测速为例)
为了理解为什么我们需要复杂的相参体制,我们回顾一下上节课讲过的利用多普勒效应探测目标速度的原理。
多普勒效应的测速过程如下:
-
雷达发射信号出去,经过一段时间延迟后,接收到目标的回波。
-
我们在数学处理上,是通过对发射信号的相位对时间 $t$ 求导,再除以 $2\pi$,从而计算出发射信号的瞬时频率(老师口误为“损失频率”)。
-
同样地,我们将回波信号的相位对时间 $t$ 求导,除以 $2\pi$,计算出回波信号的频率。
-
比较这两个频率的差值,就是多普勒频率。
大家注意,这个概念的核心在于:整个过程随时都在涉及相位信息,需要对相位进行求导等运算。
这就意味着,相位必须是精确可知的。
-
如果是非相参系统(单级振荡式),它在不同时刻的初始相位是变化的。而且这种变化往往是随着当时的随机噪声在变。由于噪声本身是一个随机变量,我们根本无法预知它在不同时刻的具体数值。
-
因此,对于像多普勒测速这样复杂的、依赖相位信息的系统,非相参体制是无法满足要求的,必须采用相位相参的体制。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









