



基于动态规划的路径规划和速度规划:探索Apollo的实践与启示
一、引言
随着自动驾驶技术的快速发展,路径规划和速度规划成为了自动驾驶领域的重要研究方向。动态规划作为一种优化算法,在路径规划和速度规划中发挥着关键作用。本文将围绕动态规划在路径规划和速度规划中的应用,结合Apollo项目进行深入分析,同时分享一些实践经验和启示。
二、动态规划在路径规划中的应用
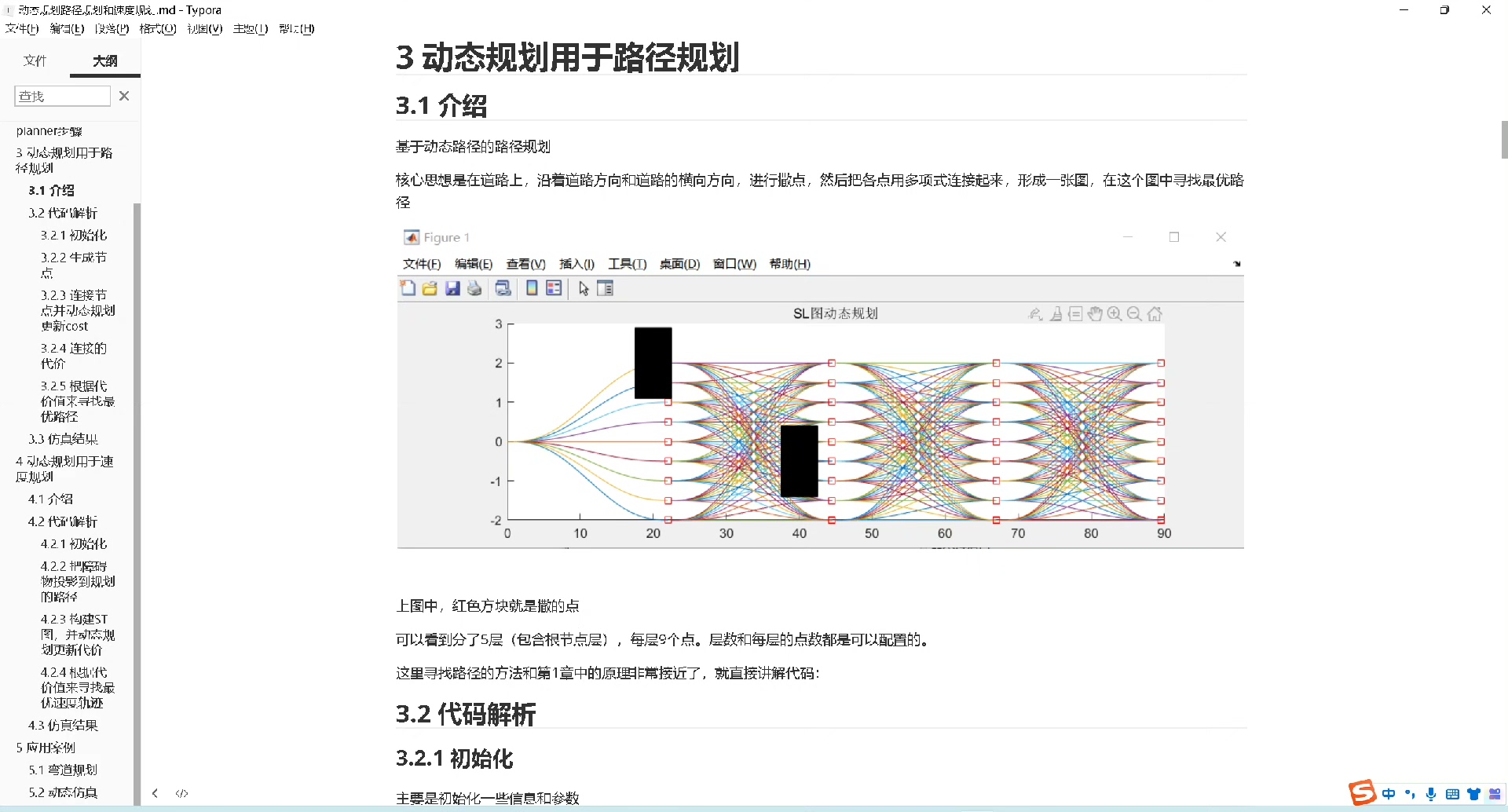
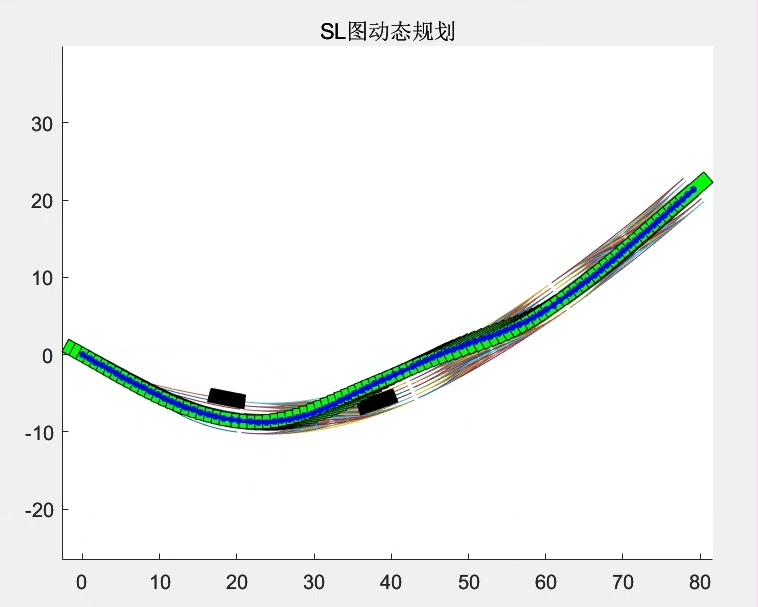
动态规划是一种基于策略优化的算法,通过对过去数据的分析和预测,帮助我们制定出最优的决策路径。在路径规划中,动态规划可以帮助我们找到最佳的路径,优化车辆的运行时间和油耗。例如,在Apollo自动驾驶中,通过使用动态规划算法,可以实现多种路况下的智能导航,根据实时交通状况和历史路径数据,为车辆提供最优的路径推荐。这种动态规划的应用不仅可以提高驾驶效率,还可以减少驾驶过程中的能源消耗和排放。
三、动态规划在速度规划中的应用
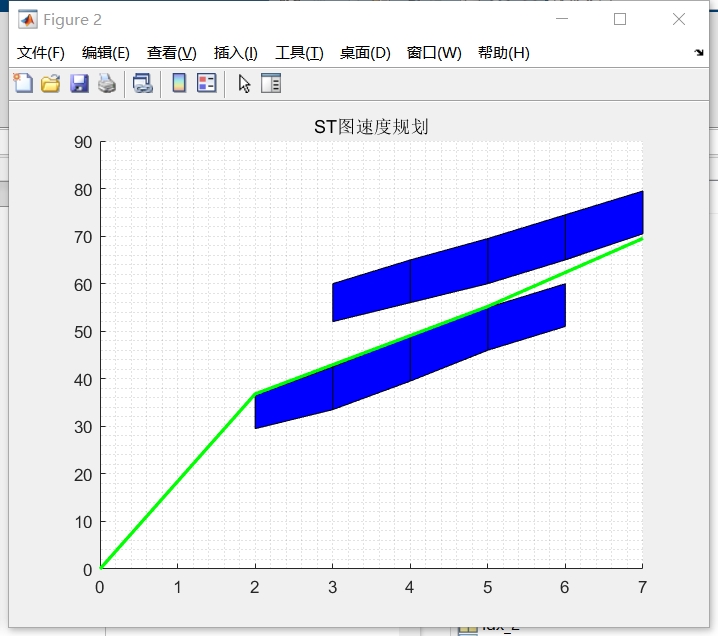
速度规划是指根据道路条件和交通状况,为车辆提供合理的行驶速度。在Apollo中,动态规划不仅用于路径规划,还应用于速度规划。通过分析道路条件和交通状况,结合动态规划算法,可以实现对车辆行驶速度的合理预测和控制。例如,Apollo可以利用动态规划算法实现多种道路类型的自动识别和适应,确保车辆在不同道路条件下都能够达到最佳的性能。
四、参考案例分析:apollo的动态规划路径规划和速度规划
apollo项目是当前自动驾驶技术领域中的领先项目之一。其动态规划路径规划和速度规划方法值得我们去学习和借鉴。在apollo项目中,动态规划算法被广泛应用于路径规划和速度规划的全过程。通过对实时交通状况的感知和分析,apollo能够制定出最优的路径推荐和行驶速度控制策略。同时,为了确保的稳定性和可靠性,apollo还采用了多种优化技术,如强化学习、人工智能等,为提供了更加强大的支持。
五、实践经验和启示
在实际应用中,基于动态规划的路径规划和速度规划不仅可以提高驾驶效率、降低能源消耗和排放,还可以提高的稳定性和可靠性。因此,我们在实践中应该积极探索和应用动态规划算法。同时,我们也需要不断地更新和改进算法和技术,以确保其在自动驾驶领域中的领先地位。此外,我们还应该注重实践与理论的结合,注重实验和测试,以确保算法的有效性和可靠性。
六、cpp代码实现示例
在实际应用中,我们可以通过cpp代码实现一些基本的动态规划算法。例如,我们可以使用动态规划算法实现最短路径问题的求解,以确定最佳的路径推荐。在代码实现中,我们可以通过编写循环和条件语句来实现算法的各种操作和步骤。通过不断优化和完善代码实现,我们可以更好地掌握和使用动态规划算法。
七、结论
综上所述,基于动态规划的路径规划和速度规划是自动驾驶领域中的重要研究方向。在实际应用中,我们应该积极探索和应用动态规划算法,提高驾驶效率、降低能源消耗和排放,提高的稳定性和可靠性。同时,我们也应该注重实践与理论的结合,注重实验和测试,以确保算法的有效性和可靠性。最后,我们也应该积极探索和不断更新新的技术和发展趋势,以适应自动驾驶领域的发展需求。
基于动态规划的路径规划和速度规划
参考apollo 的dp路径规划和速度规划
更新:增加cpp代码实现


















 560
560

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









