




 本教程详细介绍了如何使用Autoware的NDT Mapping模块进行点云地图构建。从启动仿真环境到运行runtime_manager,再到利用rqt_robot_steering控制车辆移动,最后保存并显示构建好的点云图。
本教程详细介绍了如何使用Autoware的NDT Mapping模块进行点云地图构建。从启动仿真环境到运行runtime_manager,再到利用rqt_robot_steering控制车辆移动,最后保存并显示构建好的点云图。
启动仿真环境
$ roslaunch vehicle_gazebo_simulation_launcher world_test.launch

建图
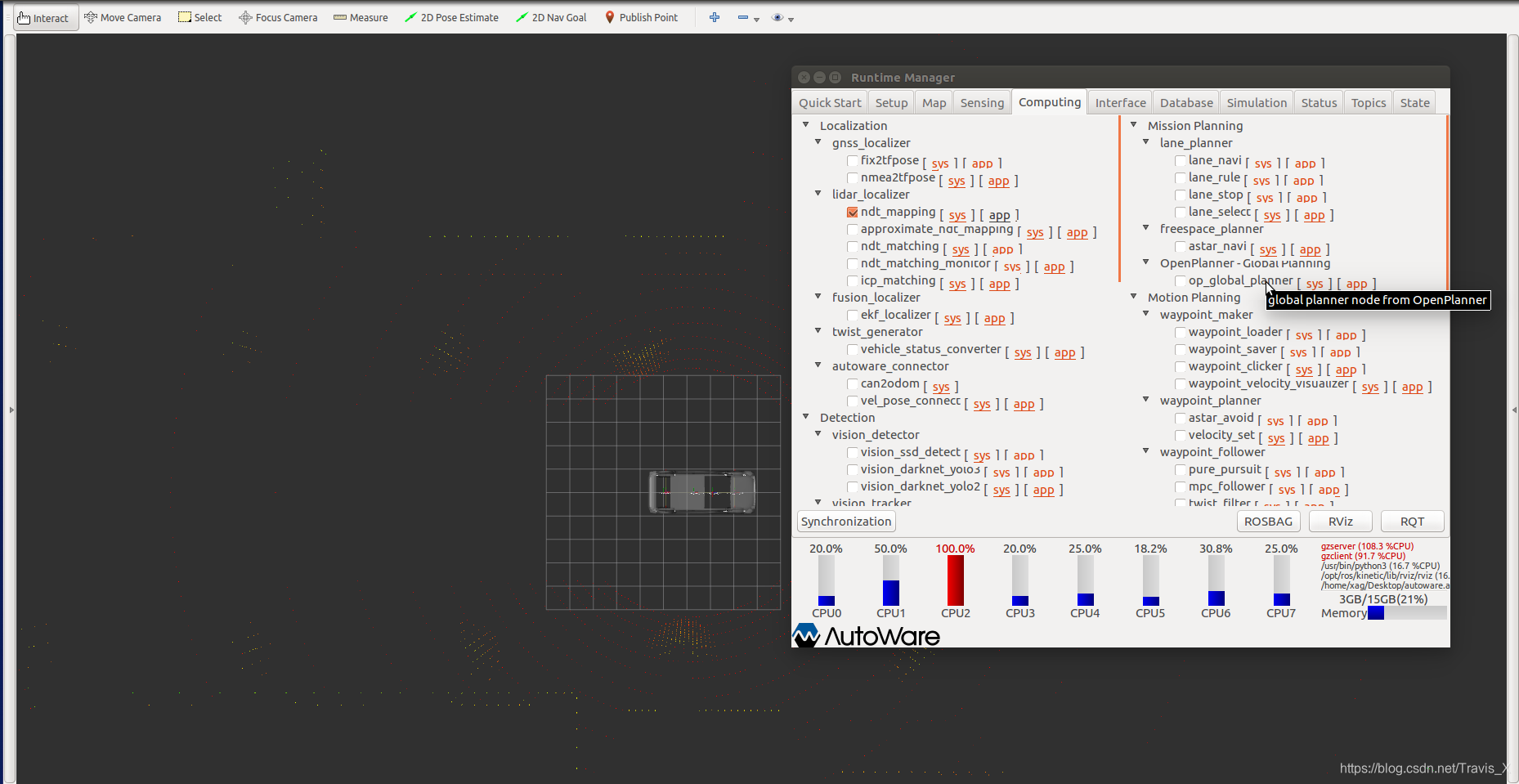
启动Autoware的runtime_manager,并打开RVIZ,然后选择ndt_mapping,在右边的【app】中调整好参数后打钩√
$ roslaunch runtime_manager runtime_manager.launch
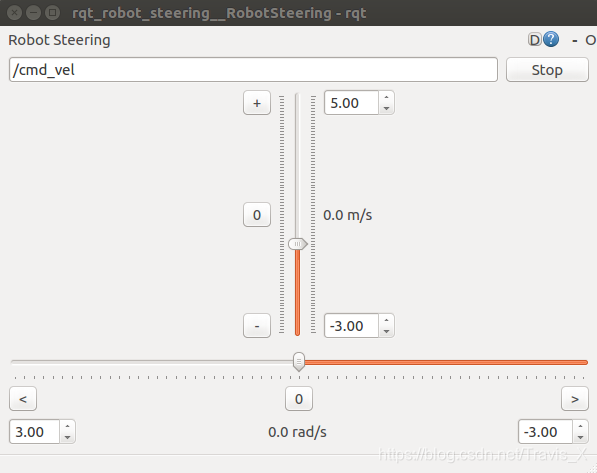
接下来通过rqt_robot_steering工具或者teleop_twist_keyboard键盘控制车辆的移动
整个建图过程视频https://www.bilibili.com/video/BV1u5411t7HJ/
【Autoware入门教程】如何使用NDT构建点云图
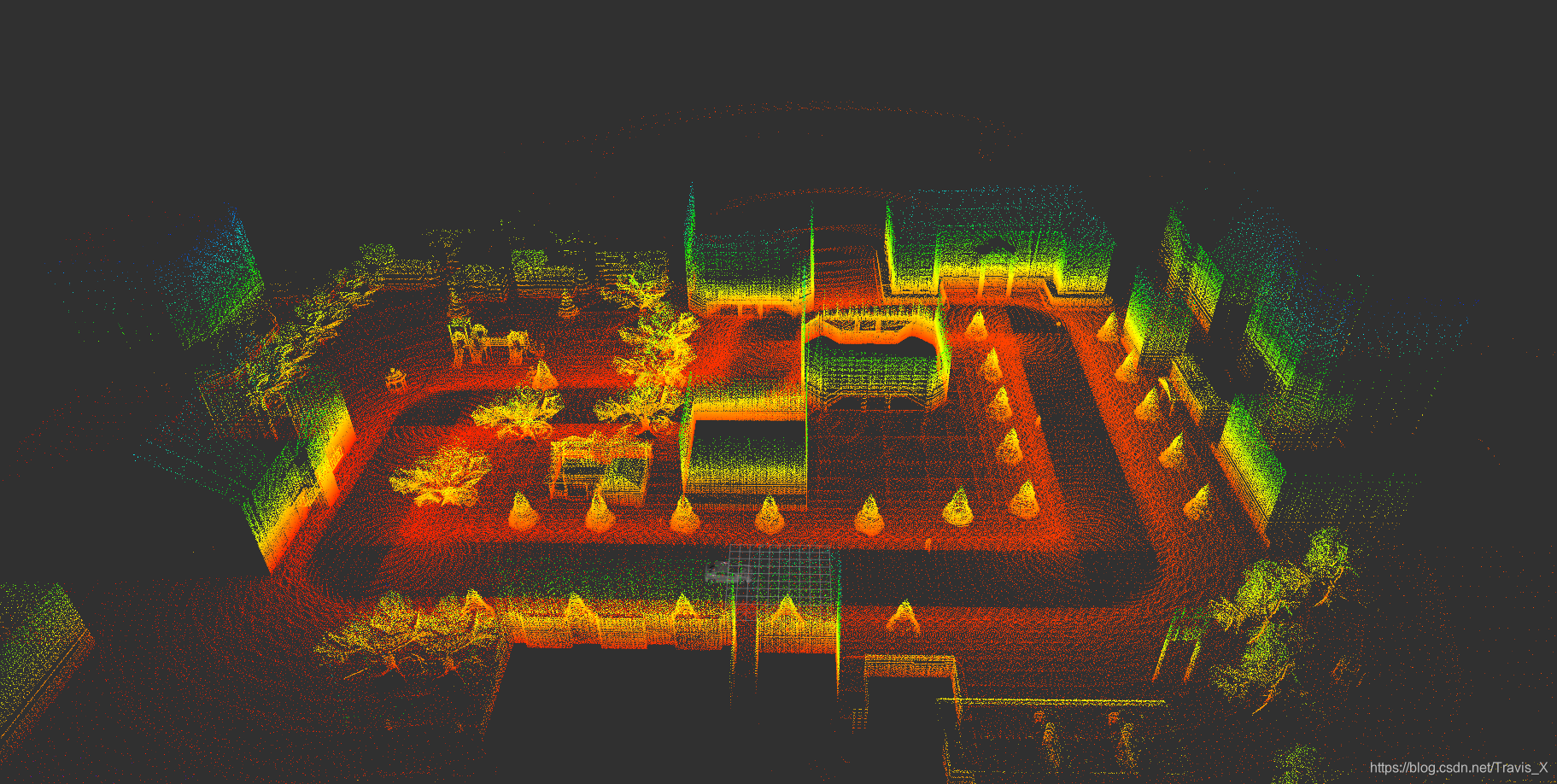
建图完成的点云图
保存点云图
建图完成后先别关闭,选择ndt_mapping右边的【app】,在下方选择Ref点云图的保存位置,然后点击PCD OUTPUT即可保存刚才NDT所建的点云图。

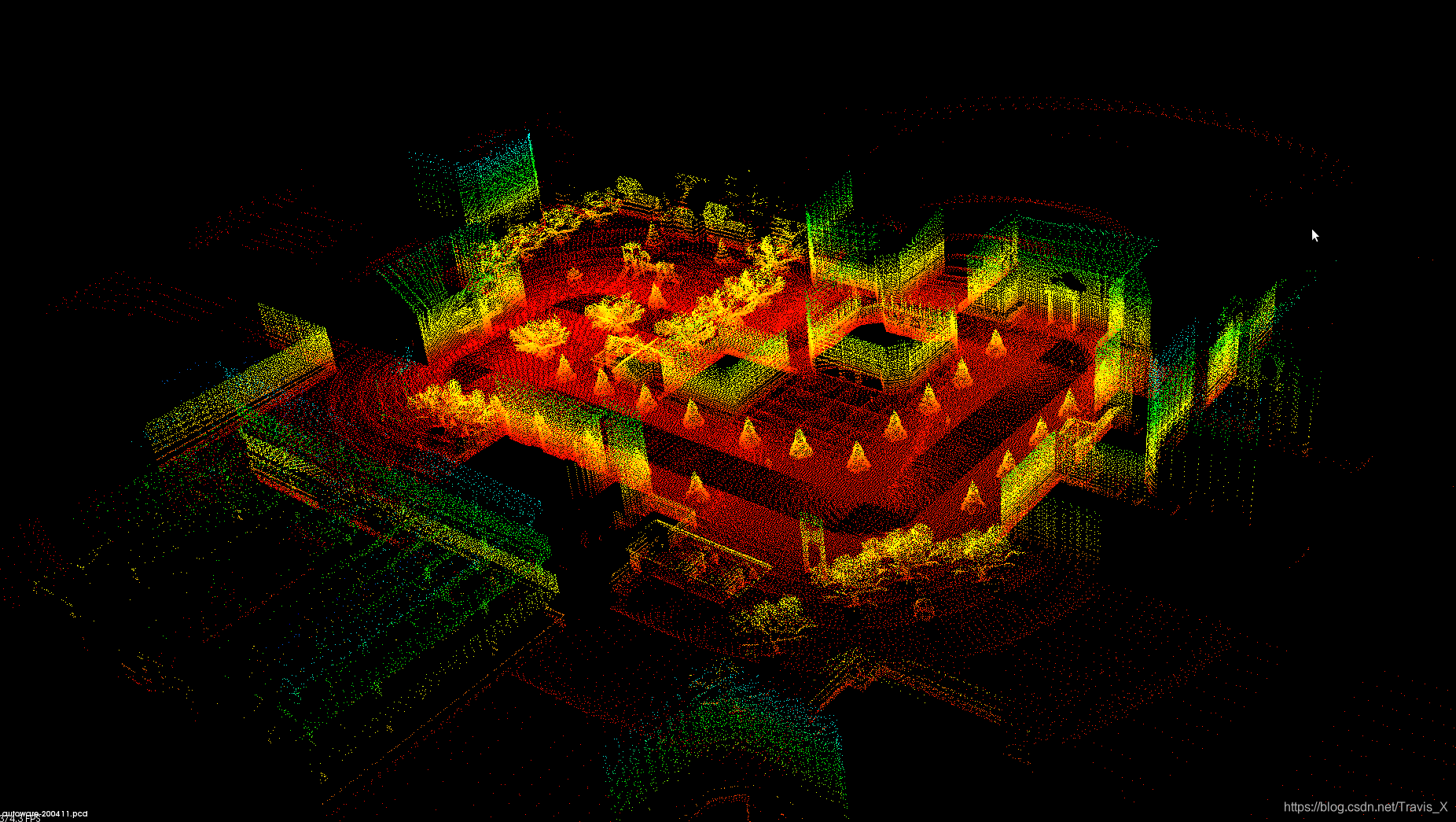
显示点云图
可以通过pcl_view查看刚才保存的pcd文件。


















 887
887

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











