



手眼标定学习记录
本文主要记录机械臂手眼标定学习过程中主要的参考资料
理论参考3D视觉工坊
1. 各坐标系转换规则

2.眼在手外原理


3.眼在手内原理


4.求解AX=XB

5.利用Opencv求解
版本在4.1.0以上



6.易错点
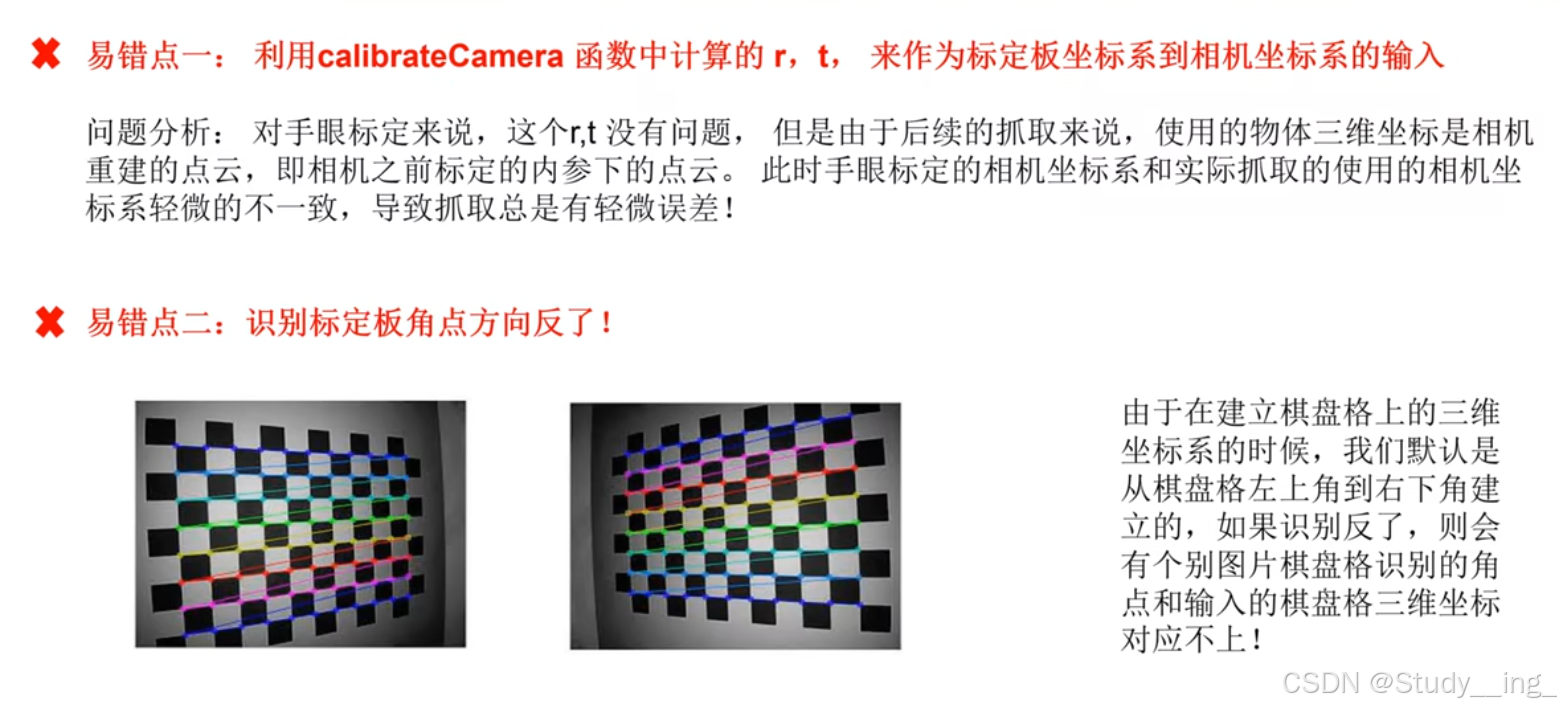
易错点三 标定板面积过小,占画面太小, 导致角点识别精度不高, 位姿估计存在误差。
易错点四 标定时要旋转,尽量让标定板出现在画面各个位置
易错点五 图片太少,要10张以上
易错点六 相机畸变大,内参不准确
3D视觉工坊的原理讲解视频
https://www.bilibili.com/video/BV1By4y1b7Q7/?spm_id_from=333.337.search-card.all.click&vd_source=0b77d6df39ab947d42bb2796e53c8f47
标定板生成网站
https://calib.io/pages/camera-calibration-pattern-generator


















 935
935

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









