




 TransCeption是一种新的医学图像分割方法,通过改进的ResInceptionPatchMerging模块捕捉多尺度表示,MultiBranchTransformerBlock强化通道间的相互作用,Intra-stageFeatureFusion增强同一阶段的特征融合,以及DualTransformerBridge整合不同尺度信息。这种方法提高了模型的性能,尤其是在处理医学图像时。
TransCeption是一种新的医学图像分割方法,通过改进的ResInceptionPatchMerging模块捕捉多尺度表示,MultiBranchTransformerBlock强化通道间的相互作用,Intra-stageFeatureFusion增强同一阶段的特征融合,以及DualTransformerBridge整合不同尺度信息。这种方法提高了模型的性能,尤其是在处理医学图像时。
使用TransCeption增强医学图像分割:一种多尺度特征融合方法
本工作中提出的设计基于三个核心原则:
(1)重新设计了编码器中的补丁合并模块,采用了ResInception Patch Merging(RIPM)算法。多分支变压器(MB变压器)采用与RIPM输出相同的分支数。结合这两个模块使模型能够在单个阶段内捕获多尺度表示。
(2)我们构建了一个阶段内特征融合(IFF)模块MB变换器,以增强聚合的特征图从所有的分支,特别是专注于所有尺度的不同通道之间的相互作用。
(3)与只包含令牌式自我注意力的桥相比,我们提出了一个双变压器桥,它还包括通道式自我注意力,以从双重角度利用不同阶段尺度之间的相关性。
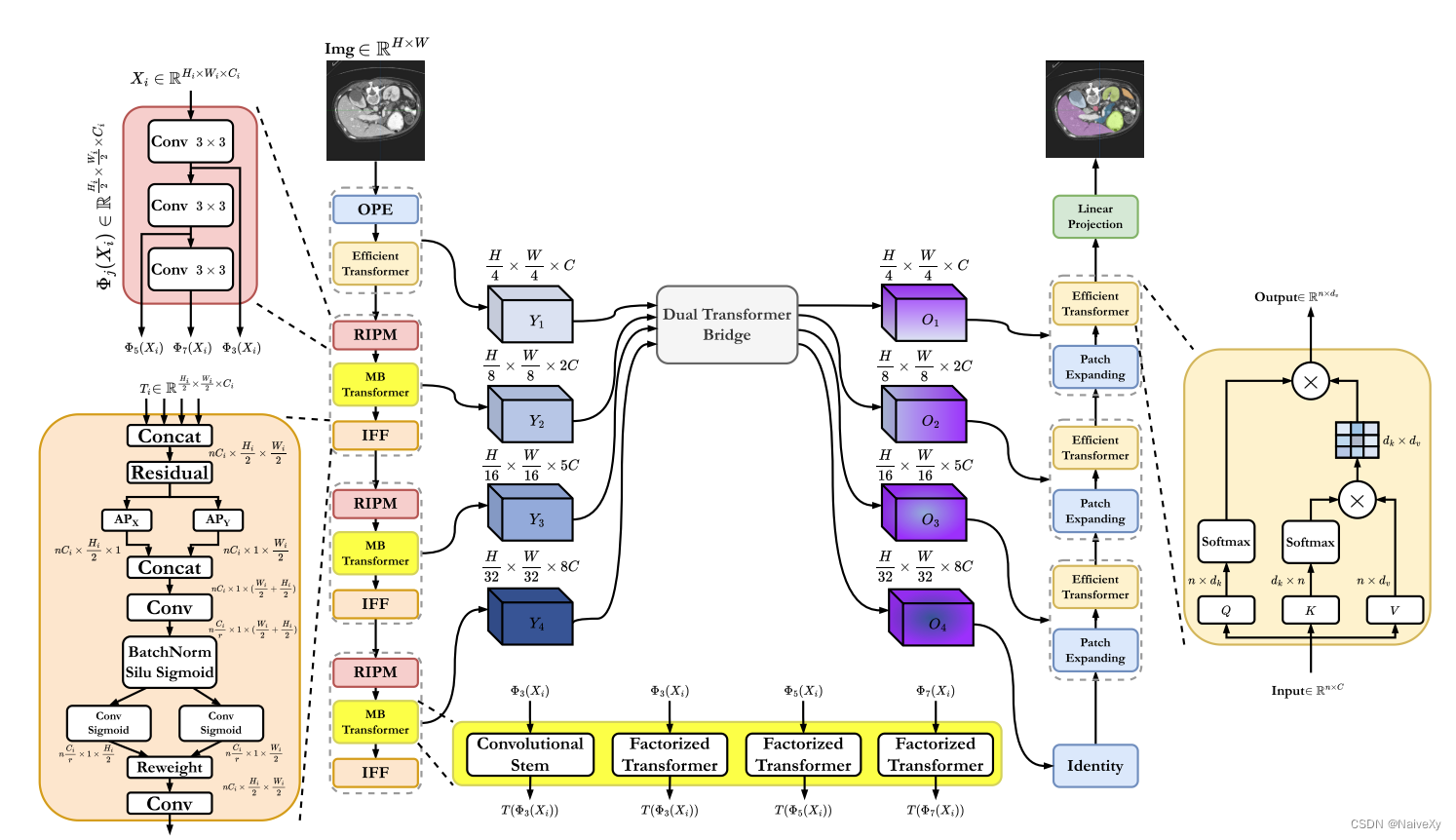
1) ResInception Patch Merging (RIPM):
RIPM模块:在基于常规变换器的U-Net模型中,使用P ×P的卷积运算在解码器的每个阶段执行补丁合并过程,然后将所得令牌序列馈送到稍后阶段的变换器块中。然而,在每个阶段具有固定块大小的块合并只能捕获单尺度特征。因此,为了增强补丁合并模块捕获的信息的表示,我们遵循Inception模块的思想,在原有的3 × 3卷积补丁嵌入模块之外,进一步添加了5×5和7×7两个补丁嵌入分支。因此,嵌入的特征图从多个路径(在我们的设计中为三个)生成,以在每个补丁合并阶段对多尺度表示进行建模。此外,以并行方式引入附加卷积层显著增加了模型复杂度,这导致硬件的更高计算成本和存储器需求。
我们使用RIPM模块来取代Inception模块。特别是,两个堆叠的3×3卷积层相当于一个5 × 5卷积层(类似地,三个堆叠
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2357
2357

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









