 MPC模型预测控制原理与实现
MPC模型预测控制原理与实现




文章参考B站Dr_can的视频 【MPC模型预测控制器】1_最优化控制和基本概念_哔哩哔哩_bilibili
在最优控制中,mpc是一个非常强大的算法,在算力资源充足的情况下,可以在线性/非线性系统中实现对系统的约束,以及预测控制,实用于高精度轨迹跟踪、以及复杂约束系统,广泛应用在自动驾驶领域中。
对比LQR mpc可以对系统进行约束,实现系统输入以及输入的高精度把控。
一.场景分析
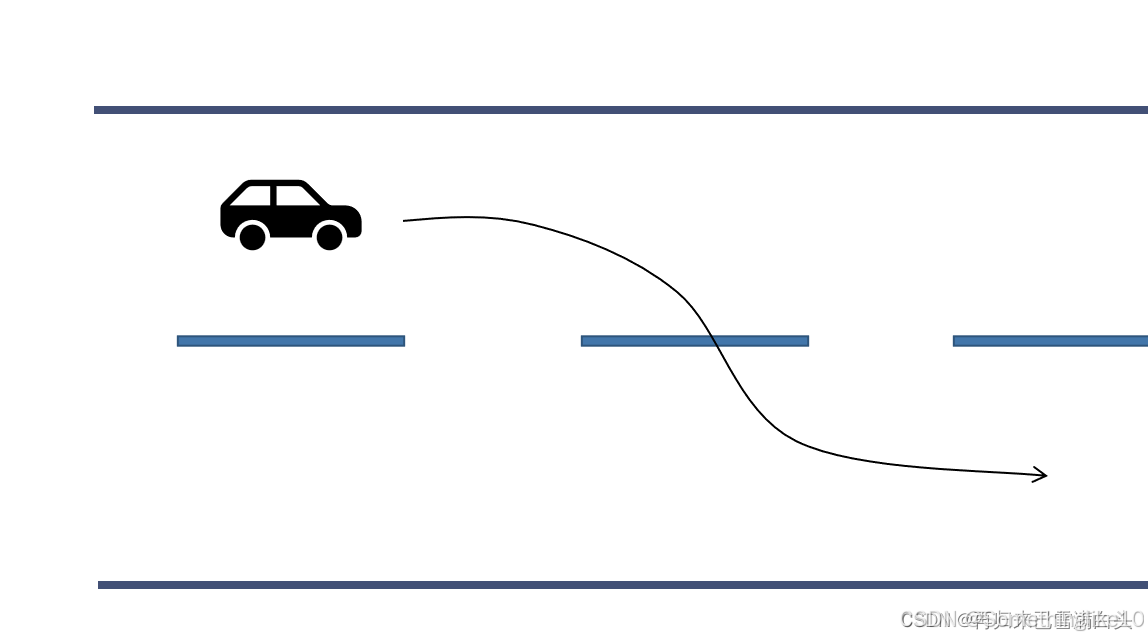
比如一辆汽车在路面上行驶,想要变道,如下图所示,采用较为舒缓的路线,动力学上消耗较少。
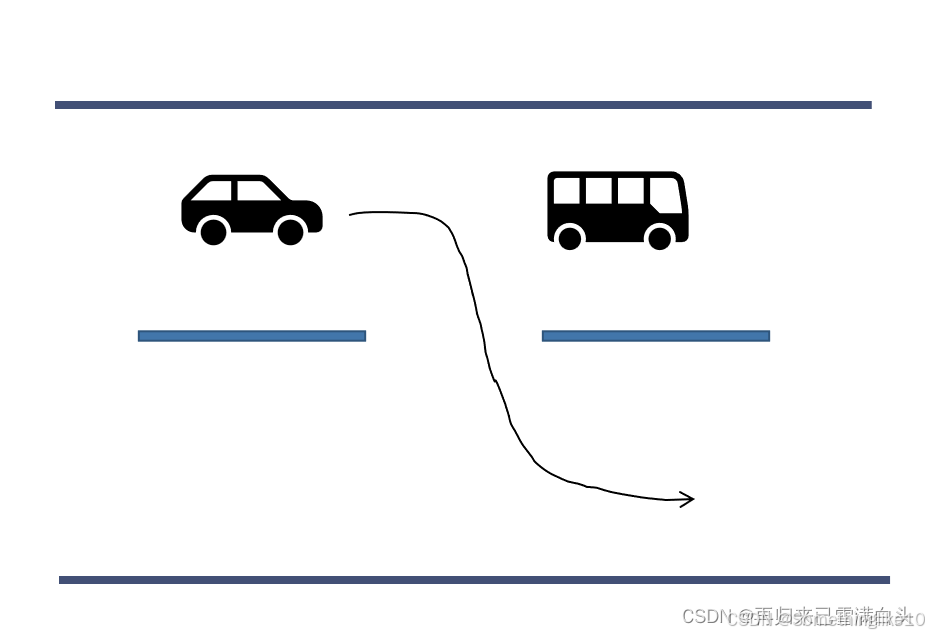
而如果在紧急避障的情况下,比如前方突然出现一辆汽车,为了躲避,汽车需要紧急向另一车道进行变道,而不考虑舒适度问题。 此时在输入能量上比上图消耗更多
二.最优控制和代价函数
在这两种情况下,哪一种是更优控制呢?
显然,图一在考虑舒适角度上更加优秀,而图二在紧急避障上则处理更加迅速,所以,对于不同的应用背景,应当设定不同的指标去衡量优劣,因此我们引入代价函数(Cost Function)的概念:
首先,对于单输入单输出系统(SISO)而言,
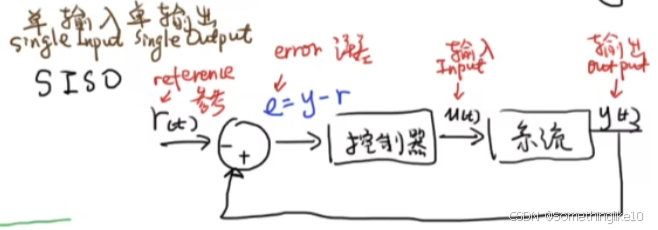
衡量系统性能优劣可以用误差的积累值(越小,代表误差越小,收敛越快)和输入的积累值
(越小,代表控制耗能越少,越节约)来衡量。
由此,我们可以定义代价函数:
函数中的q,r分别表示一个增益系数,如果q大,表示希望误差变得更小,收敛更快;r大,表示更注重输入累积,更注重节能。
接下来,我们把其推广到多输入多输出系统(MIMO),使用状态空间描述为:(这里我们假设前馈矩阵为0)
也就是
这里x是系统的状态变量,Y是系统的输出量,U为系统的输入量
此时,衡量系统表现优劣就要引入二次型的知识,我们定义:
我们来举一个简单的例子:
为了简化系统,假设输出等于状态变脸
我们假定期望输入是0,那么:
这里 E是误差量,Q,R为调节矩阵,q1,q2,r1,r2为权重参数
这里如果只关心x1的追踪情况,就可以将q1设置为一个非常大的数,而将q2设置为一个非常小的数。 如果更关心输入(考虑耗能),就可以提高r1以及r2的值 如果更关心跟踪性,就可以提高q1,q2的值
也就是说,我们可以通过调节代价函数J的参数,来对系统的最优化提出条件,来趋近于当前条件下的最优控制
三.mpc 模型预测控制的基本概念
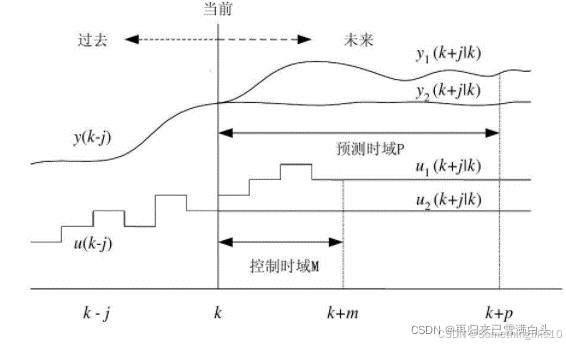
通过模型来预测系统在某一个时间段内的表现来进行优化控制
在k时刻,我们可以测量或估计出系统的当前状态y(k),再通过计算得到的u(k),u(k+1),u(k+2)...u(k+j)得到系统未来状态的估计值y(k+1),y(k+2)...y(k+j);我们将预测估计的部分称为预测区间(Predictive Horizon),将控制估计的部分称为控制区间(Control Horizon)
总的步骤:
step1: 估计/测量读取当前系统状态量
step2:基于uk uk+1 ........ uk+n 来进行最优化
离散系统的代价函数可以参考
这里的EN为最终点误差 Terminal Cost 在预测区间最后时刻计算误差的代价函数,对这个代价函数进行最优化
step3:
通过上面的计算,我们可以得到 uk uk+1 uk+3 等控制区间的控制量,但是我们在实际实行输入量时,只输入本时刻计算的uk ,在每一个时间单位都进行预测(求解最优化问题),我们将这样的方案称为滚动优化控制(Receding Horizon Control)。
四.最优化建模
对于mpc而言,有很多中不同方法对其进行最优化,这里介绍较为常用的二次规划(Quadratic Programming)
在一般的离散系统中, 形式可以表示为
我们定义:是k时刻预测的输入值,而
是k时刻预测的状态值,我们设:
对于期望输入为0,输出向量等于状态向量的离散系统:
我们可以得到代价函数:
其中,我们需要求解的是系统的输入u(k),这就需要我们把状态项x(k)给消除掉,处理这个事情需要利用系统的状态方程,首先有
我们可以通过传感器或者状态估计得到系统当前的状态值,这相当于系统的一个初值,由初值和状态方程可以得到其他项为:
我们把它简单整理一下,有:
我们再令:
我们就得到了最简单的形式:
Xk=Mx(k)+CUkXk=Mx(k)+CUk
即:
上式还可根据之前推导的公式继续化简,
其中,与
互为转置,但他们彼此又都是常数,所以他们彼此相等,因此有:
再令
有:
由此我们就得到了模型预测控制代价函数的简单形式。

















 3418
3418

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









