



1、车辆运动学模型
车辆运动学模型是描述车辆位置、速度和加速度等运动状态的模型,主要关注车辆的位置、速度、前轮转角等的关系,而不考虑任何力的影响。一般考虑运动学模型时,将车辆模型简化成单车模型 (bicycle model) 。
自行车模型(Bicycle Model)的相关假设条件包括:
- 不考虑车辆在垂直方向(Z轴方向)的运动,即假设车辆的运动是一个二维平面(X, Y)上的运动。
- 假设车辆左右侧轮胎在任意时刻都拥有相同的转向角度和转速;车辆左右两个轮胎的运动可以合并为一个轮胎来描述。
- 假设车辆行驶速度变化缓慢,忽略前后轴载荷的转移。
- 假设车身和悬架系统都是刚性系统。
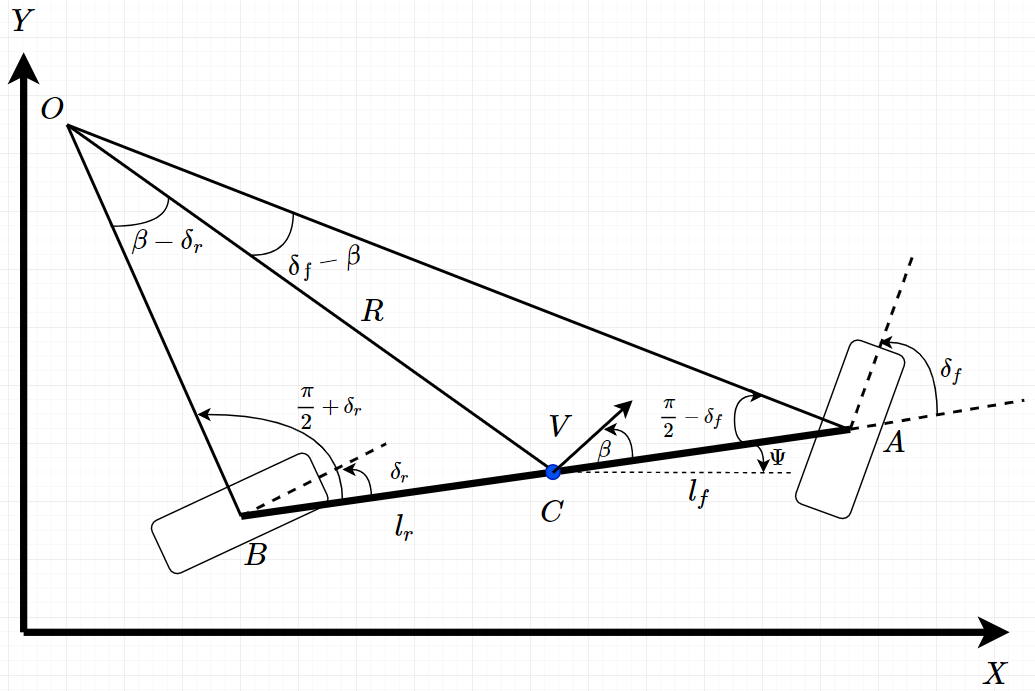
单车模型中的符号和定义如下:
A
A
A:前轮中心点;
B
B
B:后轮中心点;(左右轮都合并为单个轮子)
C
C
C:车辆重心点;
δ
f
\delta _{f}
δf:前轮转向角;
δ
r
\delta _{r}
δr:后轮转向角;
l
f
{l}_{f}
lf:前轮中心点到车辆重心点的距离;
l
r
{l}_{r}
lr:后轮中心点到车辆重心点的距离;
L
L
L:车辆轴距,
L
=
l
f
+
l
r
L={l}_{f}+{l}_{r}
L=lf+lr;
V
V
V:车辆重心的速度;
β
\beta
β:滑移角,车辆重心速度方向与车辆纵向轴的夹角;
O
O
O:车辆的瞬时旋转中心;
R
R
R:车辆的轨迹半径;
Ψ
\Psi
Ψ:车辆的航向角;
假设速度矢量 V V V 的方向在 A A A 点和 B B B 点的方向与转向角的方向相同,换句话说,在 A A A 点的速度矢量与车辆纵轴的夹角为 δ f \delta _{f} δf,同样 B B B 点的速度矢量与车辆纵轴的夹角为 δ r \delta _{r} δr,也就是说前后轮的滑移角都为 0 0 0。该条件假设成立前提的是车辆速度很低 ( < 5 m / s <5m/s <5m/s),此时轮胎产生的横向力很小,可以忽略。
车辆运动模型基于单车模型推导,推导过程不考虑车辆受到的横向力,故该模型只适用于车辆速度很低的情形。
1.1 运动方程推导
姿态信息 (偏航角)
三角形
O
C
A
OCA
OCA 根据正弦定理可得:
sin
(
δ
f
−
β
)
l
f
=
sin
(
π
2
−
δ
f
)
R
(1)
\begin{aligned} \frac{\sin\left ( \delta _{f}-\beta \right )}{{l}_{f}}=\frac{\sin\left ( \frac{\pi }{2}- \delta _{f} \right )}{R} \end{aligned}\tag{1}
lfsin(δf−β)=Rsin(2π−δf)(1)
三角形
O
C
B
OCB
OCB 根据正弦定理可得:
sin
(
β
−
δ
r
)
l
r
=
sin
(
π
2
+
δ
r
)
R
(2)
\begin{aligned} \frac{\sin\left ( \beta - \delta _{r} \right )}{{l}_{r}}=\frac{\sin\left ( \frac{\pi }{2}+ \delta _{r} \right )}{R} \end{aligned}\tag{2}
lrsin(β−δr)=Rsin(2π+δr)(2)
对等式
(
1
)
、
(
2
)
(1)、(2)
(1)、(2) 分别运用和差定理得:
sin
δ
f
cos
β
−
cos
δ
f
sin
β
l
f
=
cos
δ
f
R
(3)
\begin{aligned} \frac{\sin \delta _{f} \cos \beta -\cos \delta _{f}\sin \beta }{{l}_{f}}=\frac{ \cos \delta _{f}}{R} \end{aligned}\tag{3}
lfsinδfcosβ−cosδfsinβ=Rcosδf(3)
sin
β
cos
δ
r
−
cos
β
sin
δ
r
l
r
=
cos
δ
r
R
(4)
\begin{aligned} \frac{\sin\beta \cos\delta _{r} -\cos\beta \sin \delta _{r} }{{l}_{r}}=\frac{ \cos \delta _{r}}{R} \end{aligned}\tag{4}
lrsinβcosδr−cosβsinδr=Rcosδr(4)
等式
(
3
)
、
(
4
)
(3)、(4)
(3)、(4) 两边分别同乘
l
f
cos
δ
f
\frac{{l}_{f}}{\cos \delta _{f}}
cosδflf、
l
r
cos
δ
r
\frac{{l}_{r}}{\cos \delta _{r}}
cosδrlr得:
tan
δ
f
cos
β
−
sin
β
=
l
f
R
(5)
\begin{aligned} \tan \delta _{f} \cos \beta -\sin \beta =\frac{{l}_{f}}{R} \end{aligned}\tag{5}
tanδfcosβ−sinβ=Rlf(5)
sin
β
−
tan
δ
r
cos
β
=
l
r
R
(6)
\begin{aligned} \sin \beta - \tan \delta _{r} \cos \beta =\frac{{l}_{r}}{R} \end{aligned}\tag{6}
sinβ−tanδrcosβ=Rlr(6)
对等式
(
5
)
、
(
6
)
(5)、(6)
(5)、(6) 相加得:
(
tan
δ
f
−
tan
δ
r
)
cos
β
=
l
f
+
l
r
R
(7)
\begin{aligned} \left(\tan \delta _{f} - \tan \delta _{r}\right) \cos \beta=\frac{{l}_{f}+{l}_{r}}{R} \end{aligned}\tag{7}
(tanδf−tanδr)cosβ=Rlf+lr(7)
根据假设条件,在车辆速度很低时,车辆航向角的变化率 (
Ψ
˙
\dot{\Psi}
Ψ˙) 可近似等于车辆的角速度 (
ω
\omega
ω),根据车辆的角速度公式
ω
=
V
R
\omega = \frac{V}{R}
ω=RV,可得
Ψ
˙
=
V
R
(8)
\begin{aligned} \dot{\Psi}= \frac{V}{R} \end{aligned}\tag{8}
Ψ˙=RV(8)
将等式(7)带入等式(8)中,消除
R
R
R 项得:
Ψ
˙
=
V
cos
β
l
f
+
l
r
(
tan
δ
f
−
tan
δ
r
)
(9)
\begin{aligned} \dot{\Psi}= \frac{V\cos \beta}{{l}_{f}+{l}_{r}}\left(\tan \delta _{f} - \tan \delta _{r}\right) \end{aligned}\tag{9}
Ψ˙=lf+lrVcosβ(tanδf−tanδr)(9)
等式(9)中共有三个输入变量:
δ
f
、
δ
r
、
V
\delta _{f}、\delta _{r}、V
δf、δr、V 。
位置信息
X
˙
=
V
cos
(
β
+
Ψ
)
(10)
\begin{aligned} \dot{X} =V\cos \left ( \beta +\Psi \right ) \end{aligned}\tag{10}
X˙=Vcos(β+Ψ)(10)
Y
˙
=
V
sin
(
β
+
Ψ
)
(11)
\begin{aligned} \dot{Y} =V\sin \left ( \beta +\Psi \right ) \end{aligned}\tag{11}
Y˙=Vsin(β+Ψ)(11)
滑移角 β \beta β 推导
等式
(
5
)
、
(
6
)
(5)、(6)
(5)、(6) 两边分别同乘
l
r
{l}_{r}
lr、
l
f
{l}_{f}
lf得:
l
r
tan
δ
f
cos
β
−
l
r
sin
β
=
l
f
∗
l
r
R
(12)
\begin{aligned} {l}_{r}\tan \delta _{f} \cos \beta - {l}_{r}\sin \beta =\frac{{l}_{f} \ast {l}_{r}}{R} \end{aligned}\tag{12}
lrtanδfcosβ−lrsinβ=Rlf∗lr(12)
l
f
sin
β
−
l
f
tan
δ
r
cos
β
=
l
f
∗
l
r
R
(13)
\begin{aligned} {l}_{f}\sin \beta - {l}_{f}\tan \delta _{r} \cos \beta =\frac{{l}_{f} \ast {l}_{r}}{R} \end{aligned}\tag{13}
lfsinβ−lftanδrcosβ=Rlf∗lr(13)
等式 (12)、(13) 相减得:
cos
β
(
l
f
tan
δ
r
+
l
r
tan
δ
f
)
=
(
l
f
+
l
r
)
sin
β
(14)
\begin{aligned} \cos \beta \left ( {l}_{f}\tan \delta _{r}+{l}_{r}\tan \delta _{f} \right ) =\left ( {l}_{f} + {l}_{r} \right ) \sin \beta \end{aligned}\tag{14}
cosβ(lftanδr+lrtanδf)=(lf+lr)sinβ(14)
等式 (14) 两端同乘
1
(
l
f
+
l
r
)
cos
β
\frac{1}{\left ( {l}_{f} + {l}_{r} \right ) \cos \beta}
(lf+lr)cosβ1得:
tan
β
=
l
f
tan
δ
r
+
l
r
tan
δ
f
l
f
+
l
r
(15)
\begin{aligned} \tan \beta =\frac{ {l}_{f}\tan \delta _{r}+{l}_{r}\tan \delta _{f} }{ {l}_{f} + {l}_{r} } \end{aligned}\tag{15}
tanβ=lf+lrlftanδr+lrtanδf(15)
等式 (15) 取反三角函数得:
β
=
arctan
(
l
f
tan
δ
r
+
l
r
tan
δ
f
l
f
+
l
r
)
(16)
\begin{aligned} \beta =\arctan \left (\frac{ {l}_{f}\tan \delta _{r}+{l}_{r}\tan \delta _{f} }{ {l}_{f} + {l}_{r} } \right) \end{aligned}\tag{16}
β=arctan(lf+lrlftanδr+lrtanδf)(16)
微分方程形式
根据等式(9)、(10)、(11)、(16),对于前轮转向系统,
δ
r
=
0
\delta _{r}=0
δr=0,可得:
X
˙
=
V
cos
(
β
+
Ψ
)
Y
˙
=
V
sin
(
β
+
Ψ
)
Ψ
˙
=
V
cos
β
tan
δ
f
L
β
=
arctan
l
r
tan
δ
f
L
\begin{aligned} \dot{X} =V\cos \left ( \beta +\Psi \right ) \\ \dot{Y} =V\sin \left ( \beta +\Psi \right ) \\ \dot{\Psi}= \frac{V\cos \beta\tan \delta _{f} }{L} \\ \beta =\arctan \frac{ {l}_{r}\tan \delta _{f} }{ L } \\ \end{aligned}
X˙=Vcos(β+Ψ)Y˙=Vsin(β+Ψ)Ψ˙=LVcosβtanδfβ=arctanLlrtanδf
当车辆重心点在后轴中心点时,
β
≅
0
\beta \cong 0
β≅0,上述微分方程变为:
X
˙
=
V
cos
Ψ
Y
˙
=
V
sin
Ψ
Ψ
˙
=
V
tan
δ
f
L
\begin{aligned} \dot{X} =V\cos \Psi \\ \dot{Y} =V\sin \Psi \\ \dot{\Psi}= \frac{V\tan \delta _{f} }{L} \\ \end{aligned}
X˙=VcosΨY˙=VsinΨΨ˙=LVtanδf
1.2 补充-阿克曼转向几何
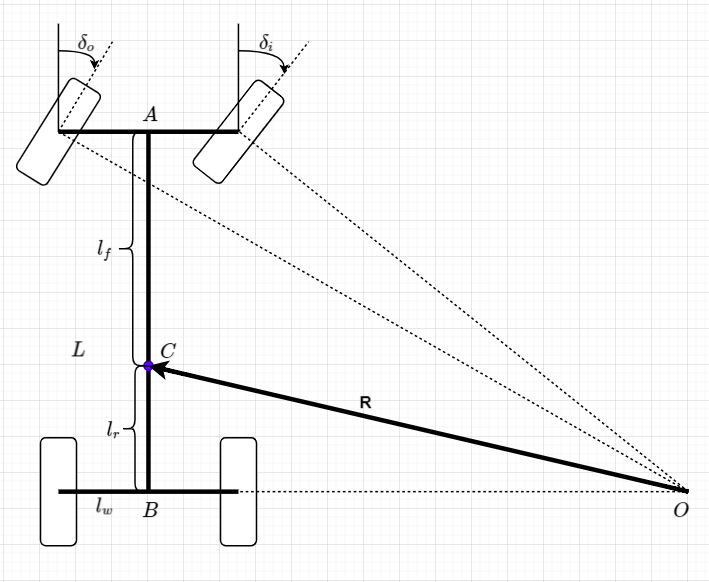
在单车模型中,假设转向时的左、右前轮偏角为同一角度,但实际两个角度并不完全相等。通常情况下,内侧轮胎转角更大,如上图所示。
上图中,
l
w
{l}_w
lw为车轴宽度;
δ
o
、
δ
i
\delta _{o}、\delta _{i}
δo、δi分别表示车辆前轮外侧、内侧转角;
L
=
l
f
+
l
r
L = {l}_f+{l}_r
L=lf+lr为车辆轴距,其值远远小于车辆的轨迹半径
R
R
R,滑移角
β
\beta
β接近于
0
0
0。
在车辆后轴为固定轴的情况下,
δ
r
=
0
\delta _{r}=0
δr=0,等式(9)可以近似为:
Ψ
˙
=
V
tan
δ
f
L
(17)
\begin{aligned} \dot{\Psi}= \frac{V\tan \delta _{f} }{L} \end{aligned}\tag{17}
Ψ˙=LVtanδf(17)
由于
δ
f
\delta _{f}
δf很小,故
tan
δ
f
≈
δ
f
\tan\delta _{f}\approx\delta _{f}
tanδf≈δf,根据等式(8)、(17)可得:
Ψ
˙
V
≈
δ
f
L
=
1
R
(18)
\begin{aligned} \frac{\dot{\Psi}}{V}\approx \frac{\delta _{f} }{L}=\frac{1}{R} \end{aligned}\tag{18}
VΨ˙≈Lδf=R1(18)
不区分车辆前后轴时,等效转向角为:
δ
=
L
R
(19)
\begin{aligned} \delta= \frac{L}{R} \end{aligned}\tag{19}
δ=RL(19)
由于内外轮转弯半径不同,根据等式 (19),车辆外轮转角、内轮转角分别为:
δ
o
=
L
R
+
l
w
2
(20)
\begin{aligned} \delta_o= \frac{L}{R+\frac{{l}_w}{2}} \end{aligned}\tag{20}
δo=R+2lwL(20)
δ
i
=
L
R
−
l
w
2
(21)
\begin{aligned} \delta_i= \frac{L}{R-\frac{{l}_w}{2}} \end{aligned}\tag{21}
δi=R−2lwL(21)
车辆前轮平均转向角为:
δ
=
δ
o
+
δ
i
2
=
L
R
−
l
w
2
4
R
(22)
\begin{aligned} \delta= \frac{\delta_o+\delta_i}{2}= \frac{L}{R-\frac{{l}_w^{2}}{4R}} \end{aligned}\tag{22}
δ=2δo+δi=R−4Rlw2L(22)
由于
l
w
{l}_w
lw远远小于
R
R
R,故
l
w
2
4
R
≈
0
\frac{{l}_w^{2}}{4R}\approx0
4Rlw2≈0,等式(22)可近似为:
δ
=
L
R
(23)
\begin{aligned} \delta= \frac{L}{R} \end{aligned}\tag{23}
δ=RL(23)
车辆内外轮转角之差
Δ
δ
\Delta\delta
Δδ为:
Δ
δ
=
δ
i
−
δ
o
=
L
⋅
l
w
R
2
−
l
w
2
4
≅
L
R
2
l
w
=
δ
2
l
w
L
(24)
\begin{aligned} \Delta\delta= \delta_i-\delta_o= \frac{L\cdot {l}_w}{R^{2}-\frac{ {l}_w^{2}}{4}}\cong \frac{L}{R^{2}}{l}_w=\delta^{2}\frac{{l}_w}{L} \end{aligned}\tag{24}
Δδ=δi−δo=R2−4lw2L⋅lw≅R2Llw=δ2Llw(24)
根据等式 (24) 可知,前轮内外转向角的差值
Δ
δ
\Delta\delta
Δδ 与平均转向角
δ
\delta
δ 的二次方成正比,所以前轮转向角越大,内外轮的转向角误差就越大。
2、一阶转向延迟的车辆运动学模型
采用以车辆后轴中心为原点的运动学模型
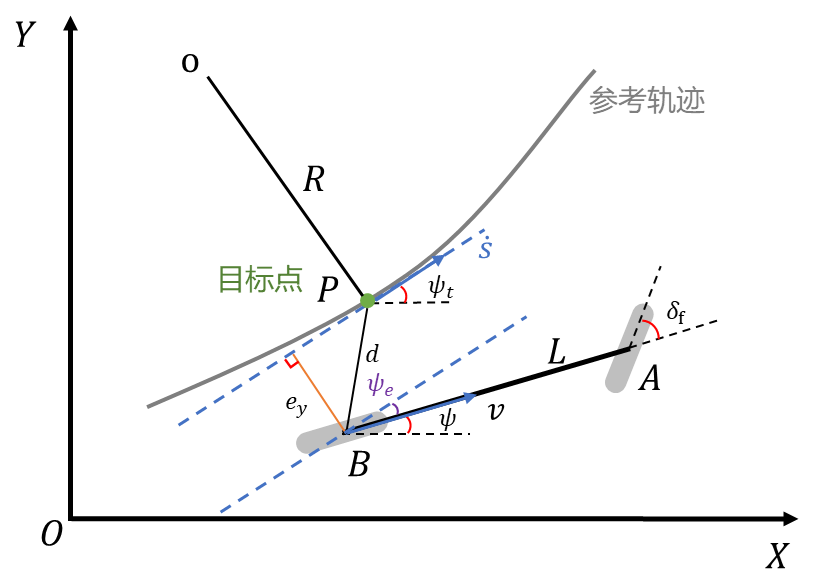
图中的部分符号和定义如下:
A
、
B
A、B
A、B:车辆前轴、后轴中心点;
P
P
P:规划路径中距后轴中心最近的点;
L
L
L:车辆轴距;
v
v
v:车辆后轴中心处的速度;
s
˙
\dot s
s˙:目标点处的速度;
ψ
\psi
ψ:车辆航向角;
ψ
t
\psi_t
ψt:
P
P
P点处的航向角;
δ
f
\delta_f
δf:车辆的前轮转角;
ψ
e
\psi_e
ψe:
P
P
P点处航向角与车辆航向角之间的偏差;
e
y
e_y
ey:前轴中线点到
P
P
P点切线方向的偏差;
d
d
d:后轴中心点到目标点的距离;
其中:
e
y
=
d
⋅
sin
(
ψ
t
)
ψ
e
=
ψ
−
ψ
t
\begin{aligned} e_y &= d \cdot \sin(\psi_t) \\ \psi_e &= \psi - \psi_t \\ \end{aligned}
eyψe=d⋅sin(ψt)=ψ−ψt
进一步推导可得:
e
˙
y
=
v
⋅
sin
(
ψ
e
)
ψ
˙
e
=
v
⋅
tan
(
δ
f
)
L
\begin{aligned} \dot{e}_y &= v \cdot \sin(\psi_e) \\ \dot{\psi}_e &= \frac{v \cdot \tan(\delta_f)}{L} \\ \end{aligned}
e˙yψ˙e=v⋅sin(ψe)=Lv⋅tan(δf)
此处在计算
ψ
˙
e
\dot{\psi}_e
ψ˙e时进行了简化,假定
ψ
˙
t
=
0
\dot{\psi}_t=0
ψ˙t=0。
车辆转向一阶延误方程如下:
τ
⋅
δ
˙
f
+
δ
f
=
δ
d
\begin{aligned} \tau \cdot \dot{\delta}_f + \delta_f = \delta_d \end{aligned}
τ⋅δ˙f+δf=δd
其中,
δ
d
\delta_d
δd为目标前轮转角,
τ
\tau
τ为转向延迟时间。
上式变化可得:
δ
˙
f
=
δ
d
−
δ
f
τ
\begin{aligned} \dot{\delta}_f = \frac{\delta_d- \delta_f}{\tau} \\ \end{aligned}
δ˙f=τδd−δf
设置状态变量和控制变量如下:
x
=
[
e
y
,
ψ
e
,
δ
f
]
T
u
=
[
δ
d
]
\begin{aligned} \mathrm{x} &= [e_y, \psi_e, \delta_f]^T \\ \mathrm{u} &= [\delta_d] \end{aligned}
xu=[ey,ψe,δf]T=[δd]
状态方程如下:
e
˙
y
=
v
⋅
sin
(
ψ
e
)
ψ
˙
e
=
v
⋅
tan
(
δ
f
)
L
δ
˙
f
=
δ
d
−
δ
f
τ
\begin{aligned} \dot{e}_y &= v \cdot \sin(\psi_e) \\ \dot{\psi}_e &= \frac{v \cdot \tan(\delta_f)}{L} \\ \dot{\delta}_f &= \frac{\delta_d- \delta_f}{\tau} \end{aligned}
e˙yψ˙eδ˙f=v⋅sin(ψe)=Lv⋅tan(δf)=τδd−δf
将上述方程利用泰勒方程一阶线性化:
x
˙
=
f
(
x
,
u
)
x
˙
=
f
(
x
r
,
u
r
)
+
f
x
(
x
,
u
)
(
x
−
x
r
)
+
f
u
(
x
,
u
)
(
u
−
u
r
)
\begin{aligned} \dot{\mathrm{x}} &= f(\mathrm{x}, \mathrm{u}) \\ \dot{\mathrm{x}} &=f(\mathrm{x_r}, \mathrm{u_r}) + f_\mathrm{x}(\mathrm{x}, \mathrm{u})(\mathrm{x} - \mathrm{x_r})+f_\mathrm{u}(\mathrm{x}, \mathrm{u})(\mathrm{u} - \mathrm{u_r}) \end{aligned}
x˙x˙=f(x,u)=f(xr,ur)+fx(x,u)(x−xr)+fu(x,u)(u−ur)
其中,
x
r
\mathrm{x_r}
xr为参考点处状态量,
u
r
\mathrm{u_r}
ur为参考点处控制量。
f
x
(
x
,
u
)
=
[
∂
f
1
∂
x
1
∂
f
1
∂
x
2
∂
f
1
∂
x
3
∂
f
2
∂
x
1
∂
f
2
∂
x
2
∂
f
2
∂
x
3
∂
f
3
∂
x
1
∂
f
3
∂
x
2
∂
f
3
∂
x
3
]
=
[
0
v
⋅
cos
(
ψ
e
)
0
0
0
v
L
⋅
cos
2
(
δ
f
)
0
0
−
1
τ
]
f
u
(
x
,
u
)
=
[
∂
f
1
∂
u
∂
f
2
∂
u
∂
f
3
∂
u
]
=
[
0
0
1
τ
]
\begin{aligned} f_\mathrm{x}(\mathrm{x}, \mathrm{u})& = \begin{bmatrix} \frac{\partial f_1}{\partial x_1} & \frac{\partial f_1}{\partial x_2} & \frac{\partial f_1}{\partial x_3} \\ \frac{\partial f_2}{\partial x_1} & \frac{\partial f_2}{\partial x_2} & \frac{\partial f_2}{\partial x_3} \\ \frac{\partial f_3}{\partial x_1} & \frac{\partial f_3}{\partial x_2} & \frac{\partial f_3}{\partial x_3} \end{bmatrix} = \begin{bmatrix} 0 & v \cdot \cos(\psi_e) & 0 \\ 0 & 0 & \frac{v}{L \cdot \cos^{2}(\delta_f)}\\ 0 & 0 & -\frac{1}{\tau} \end{bmatrix} \\ f_\mathrm{u}(\mathrm{x}, \mathrm{u}) &= \begin{bmatrix} \frac{\partial f_1}{\partial u}\\ \frac{\partial f_2}{\partial u}\\ \frac{\partial f_3}{\partial u} \end{bmatrix} = \begin{bmatrix} 0\\ 0\\ \frac{1}{\tau} \end{bmatrix} \end{aligned}
fx(x,u)fu(x,u)=
∂x1∂f1∂x1∂f2∂x1∂f3∂x2∂f1∂x2∂f2∂x2∂f3∂x3∂f1∂x3∂f2∂x3∂f3
=
000v⋅cos(ψe)000L⋅cos2(δf)v−τ1
=
∂u∂f1∂u∂f2∂u∂f3
=
00τ1
设参考点处的状态变量和控制变量分别为
x
r
=
[
0
,
0
,
δ
f
r
]
T
\mathrm{x}_r = [0, 0, \delta_{f_r}]^T
xr=[0,0,δfr]T,
u
r
=
[
δ
d
r
]
\mathrm{u}_r = [\delta_{d_r}]
ur=[δdr]可得:
x
˙
=
A
⋅
x
+
B
⋅
u
+
d
A
=
[
0
v
r
0
0
0
v
r
L
⋅
cos
2
(
δ
f
r
)
0
0
−
1
τ
]
B
=
[
0
0
1
τ
]
d
=
[
0
−
v
r
⋅
δ
f
r
L
⋅
cos
2
(
δ
f
r
)
0
]
\begin{aligned} \dot{\mathrm{x}} &= A \cdot \mathrm{x} + B \cdot \mathrm{u} + d\\ A &=\begin{bmatrix} 0 & v_r & 0 \\ 0 & 0 & \frac{v_r}{L \cdot \cos^2(\delta_{f_r})}\\ 0 & 0 & -\frac{1}{\tau} \end{bmatrix} \\ B &= \begin{bmatrix} 0\\ 0\\ \frac{1}{\tau} \end{bmatrix} \\ d &= \begin{bmatrix} 0 \\ -\frac{v_r \cdot \delta_{f_r}}{L \cdot \cos^2(\delta_{f_r})} \\ 0 \end{bmatrix} \\ \end{aligned}
x˙ABd=A⋅x+B⋅u+d=
000vr000L⋅cos2(δfr)vr−τ1
=
00τ1
=
0−L⋅cos2(δfr)vr⋅δfr0
其中,
v
r
v_r
vr为参考点处的速度,
δ
f
r
\delta_{f_r}
δfr为参考点处的车辆前轮转角。
上式中
d
d
d若基于小角度假设,可以化简为0;但在autoware的运动学模型中,
d
d
d为上述值。

















 740
740

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









