



一、论文主要贡献
该论文首次提出了一个 连续时间(Continuous-Time)视频目标分割框架,充分利用事件相机(Event Camera)提供的高时间分辨率,实现低延迟、高精度的目标分割。主要贡献包括:
提出连续时间目标分割任务(Continuous-Time Object Segmentation)
- 与传统基于帧的视频分割不同,该任务可在任意时间点对事件流输出前景目标掩膜;
- 将视频分割的时间粒度提升至 亚毫秒级,适用于高速运动和动态交互场景。
设计事件驱动的稀疏监督框架(Sporadic Groundtruth Supervision)
-
利用离散关键帧的标注,将监督信号传播至整个事件流;
-
极大降低了标注成本,同时保持连续时间分割精度。
提出基于连续时间神经表示的方法
- 采用基于时间的 MLP / 递归网络进行隐状态建模;
- 支持事件序列递归更新目标表示,实现任意时间插值与前景恢复。
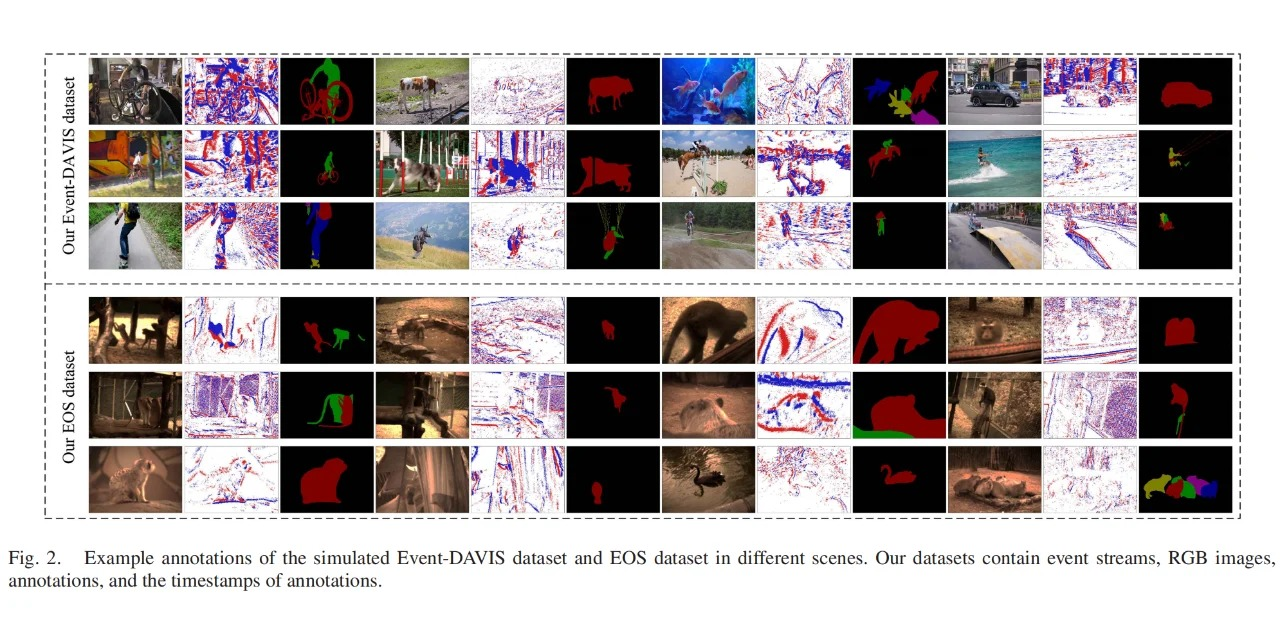
构建高质量事件分割数据集与采集平台(MOTChallenge 风格)
- 数据集具有亚毫秒级时间同步;
-
使用 DAVIS346 事件相机搭建平台,包含真实场景与稀疏标注;
-
提供开源采集工具及标准评测代码,便于社区复现。

二、方法框架解读
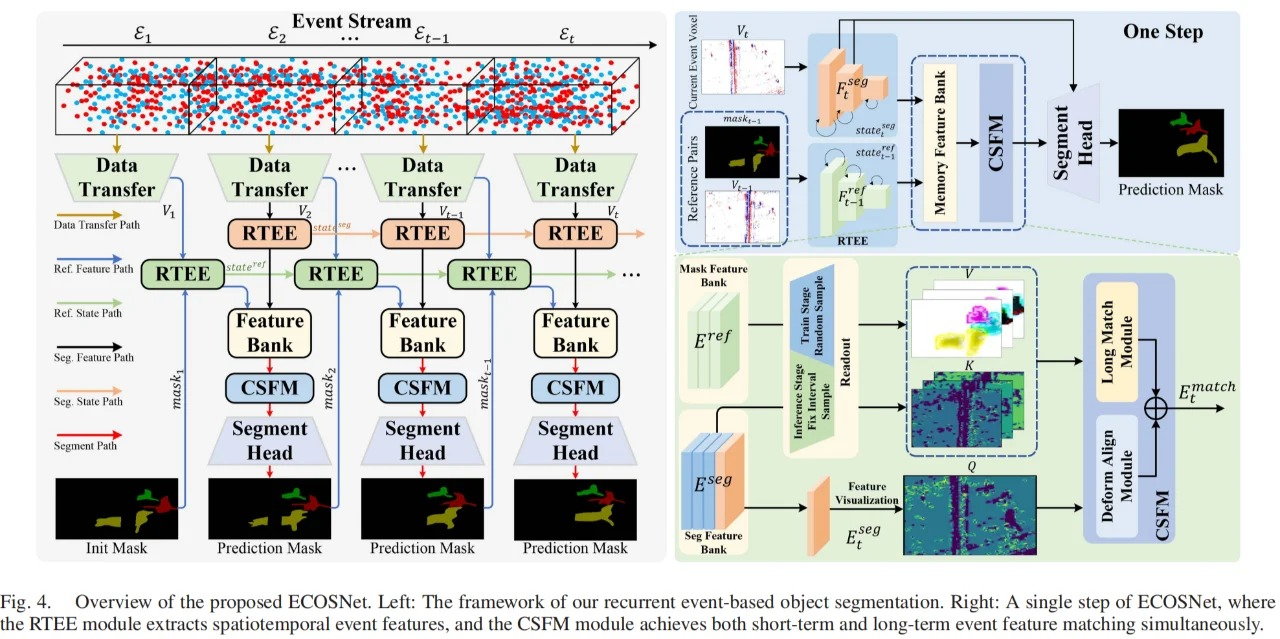
论文提出的 连续时间分割模型(Continuous-Time Segmentation Model) 核心组成如下:
-
输入数据
-
事件流:由事件相机产生,格式
(x, y, t, p)表示位置、时间戳与极性; -
稀疏标注帧:选定关键时间点的图像或伪标签,用于监督训练;
-
可选 APS / RGB 图像帧:用于可视化或初始化。
-
模型组成
a. Event Encoder
-
将事件块输入卷积或图神经网络,提取局部空间–时间特征;
-
输出时序嵌入用于隐状态更新。
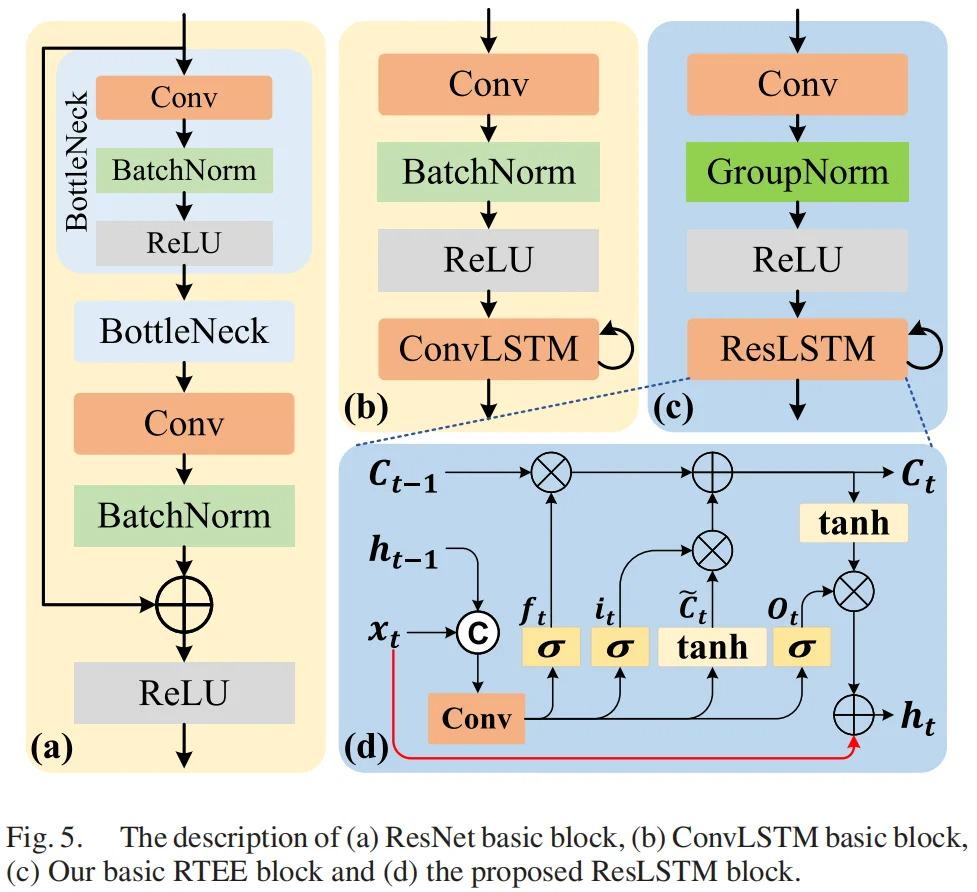
b. Continuous-Time Latent Memory (CTLM)
-
类似 LSTM 的递归单元,整合连续时间信息;
-
支持任意时间点查询和插值,具有时间记忆能力。
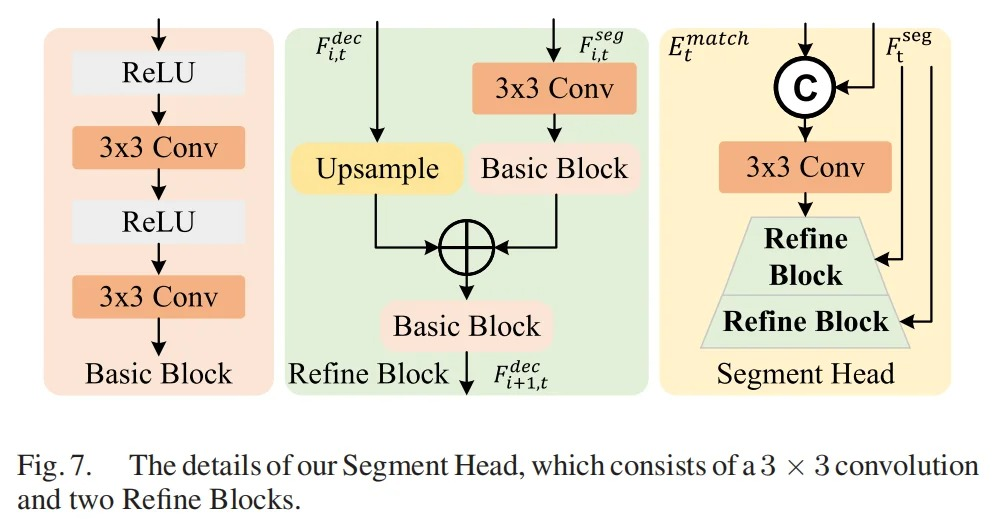
c. Segmentation Decoder
-
输入隐状态,输出前景分割掩膜;
-
通过稀疏关键帧监督进行训练。
-
训练与监督策略
-
利用稀疏帧监督指导整个时间线的目标位置学习;
-
引入时间插值损失与事件前后约束,增强时间一致性
三、数据集与实验设置
-
数据采集平台
论文构建了高精度事件相机采集系统:
| 项目 | 配置 |
| 事件相机 | DAVIS346(解析度 346×260) |
| 数据接口 | USB3 高速传输 |
| 时间同步 | 亚毫秒级 (<1ms) |
| 场景类型 | 室内/室外真实动态 |
设备同时输出:
-
事件流:由光强变化触发;
-
APS 帧:灰度图,用于可视化和辅助。
-
采集方式与标注
-
每段视频长度 1–5 秒,事件数百万;
-
每段仅选取 10–15 帧关键时间点进行人工标注;
-
标注文件包含像素级前景掩膜与时间戳映射表(PNG + JSON/TXT)。
-
数据集规模与划分
| 项目 | 数量 |
| 总序列数 | 50+ |
| 每序列标注帧 | 10–15 |
| 分割目标数 | 1–3 |
| 数据划分 | 训练 / 验证 / 测试 |
四、实验评估指标
针对连续时间事件分割任务,采用多维评价:
-
IoU / mIoU:空间分割精度;
-
Temporal Stability:时间一致性;
-
Latency-aware Accuracy:低延迟条件下的预测精度。
从系统解决方案角度来看,论文方法对输入传感器形态提出了明确工程假设:事件相机需提供高时间分辨率、低延迟事件流,同时在关键时间点提供可对齐图像帧以支撑稀疏监督。
在实验中,DAVIS 系列设备验证了“事件 + 图像”融合输入的可行性。这种输入形式与实际工业和科研系统高度契合,说明连续时间分割方法不仅是算法创新,也具备真实硬件运行潜力。
在这一背景下,灵光一号作为 RGB + EVS 融合视觉相机,提供了与论文方法天然匹配的硬件能力:
-
同步输出高分辨率 RGB 图像和高时间分辨率事件流;
-
硬件级时间对齐保证数据一致性;
-
可直接支撑稀疏监督训练与连续事件建模。
因此,该方法可在灵光一号平台上直接落地运行,形成完整的“融合感知硬件 + 连续时间目标分割算法”解决方案,适用于高速运动感知、低延迟交互及复杂动态场景。

六、总结
该论文开创性地提出了连续时间目标分割方法,并提供了完整的数据、实验与算法体系;在工程视角下,方法与灵光一号融合视觉相机天然适配,展示了从学术算法到工业落地的可行路径,为下一代高动态、高精度视觉系统提供了理论和实践参考。
申明:本文基于 TPAMI 2025 发表的相关研究进行技术解读与应用分析,论文成果归原作者所有,本文仅从工程与产业视角探讨事件相机(EVS)连续时间目标分割的发展趋势及应用价值。
paper:https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10713285
















 2113
2113

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









