




一、 为何要学习“AI+机器人”?
在开始动手实验前,理解“AI”与“机器人”结合的价值至关重要。这不仅是技术的融合,更是开启智能体(Agent)未来的钥匙。
-
从自动化到智能化:传统机器人依赖于精确的预编程,只能在结构化环境中工作。AI的引入(如计算机视觉、自然语言处理),赋予机器人感知、理解和决策的能力,使其能适应开放、动态的真实世界。
-
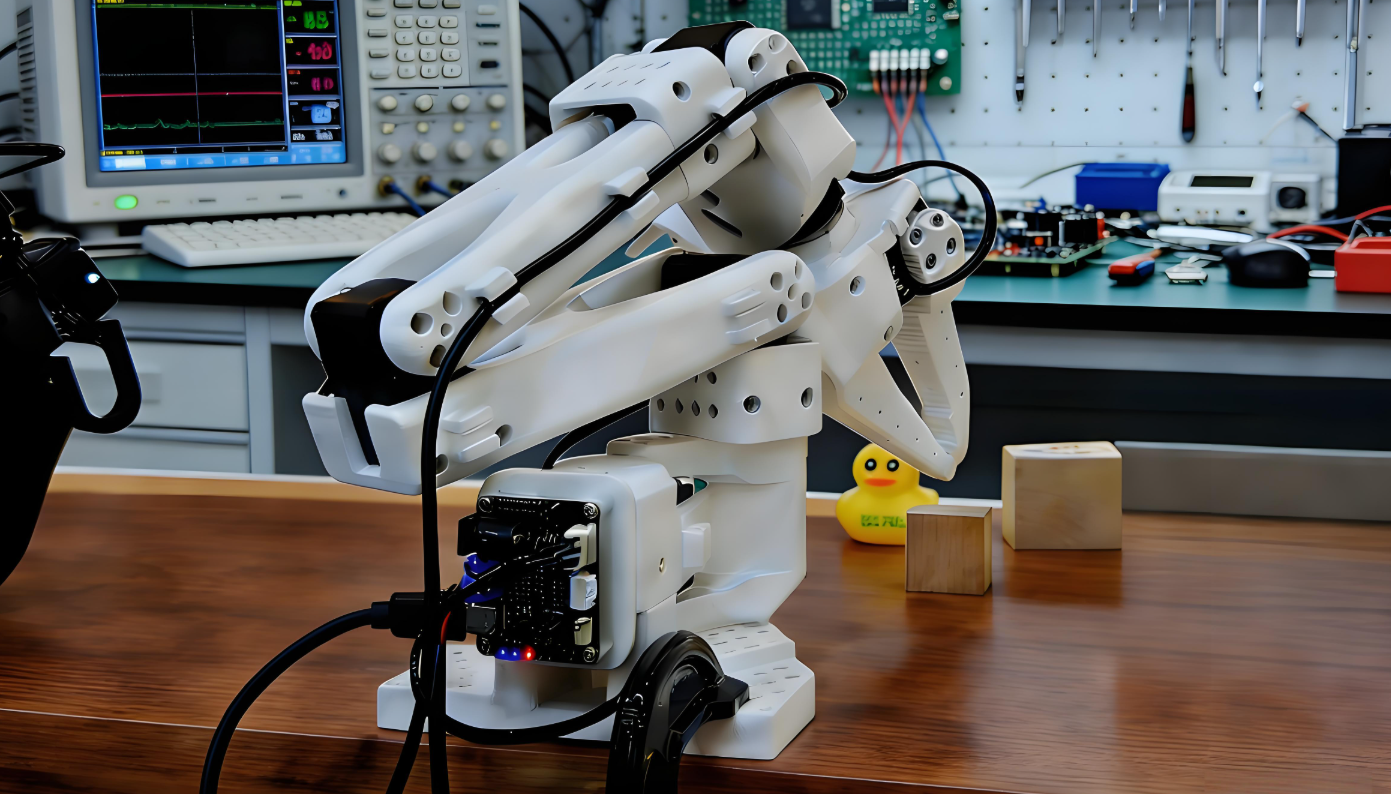
解决复杂任务的核心:本课程的终极目标——“按颜色自动分类积木”——单一技术无法完成。它需要视觉(识别)、决策(规划)、控制(执行) 的协同,这正是AI与机器人系统深度融合才能解决的典型问题。
-
前沿技术与职业方向:“AI+机器人”是智能制造、智慧物流、服务机器人等领域的核心技术。掌握此项技能,意味着您将站在机器人工程师、AI算法工程师、智能系统集成师等前沿岗位的起点。
本课程的体现:您将亲身体验AI如何赋能机器人:
-
让控制更直观:在实验09中,使用“拿起红色积木”这样的自然语言直接指挥机械臂,背后是视觉语言模型(VLM) 在理解您的意图。
-
让感知更智能:在实验05-07中,为机器人装上“眼睛”,通过OpenCV和手眼标定,让它能“看见”并定位物体。
-
探索前沿:实验11的具身智能实验,让您初步接触让AI模型拥有“身体”、通过交互进行学习的更高级形态。
二、 课程总览:您将开启怎样的学习之旅?
本课程是一个从零开始、手脑并用的实践指南。通过11个递进式实验,您将完整走完“传统控制 → 仿真与强化学习 → 视觉语言模型(VLM)应用”的技术演进路径,最终构建一个能听、会看、能执行的智能机械臂系统。
核心学习闭环:感知(视觉)→ 决策(规划/AI)→ 执行(控制)。
十个核心实验构成了您的学习阶梯:
第一阶段:基础唤醒与控制(实验1-4)
实验1:硬件连接、校准与单关节控制——让机械臂“动起来”。
实验2-3:正/逆运动学——掌握关节角度与末端位置互相推算的核心数学原理。
实验4:轨迹规划——实现末端执行器的平滑直线运动。
第二阶段:视觉感知与空间映射(实验5-7)
实验5:视觉接入与颜色识别——为机器人装上“眼睛”。
实验6-7:逆透视变换与手眼标定(眼在手外/眼在手上)——实现从图像像素坐标到机器人三维空间坐标的精准转换,这是视觉控制的基础。
第三阶段:智能应用与综合任务(实验8-10)
实验8:Gazebo仿真——在虚拟世界中安全地演练和验证算法。
实验9:VLM自然语言控制——用日常语言指挥机械臂,体验最直观的人机交互。
实验10:综合任务:积木分类——整合所有知识,完成一个完整的智能任务。
拓展探索(实验11)
实验11:具身智能实验:进阶内容,初步体验数据采集、模型训练,让机械臂具备一定的自主学习能力。
三、 开始前,请务必确认您的准备
为了顺利开始这段旅程,请确保您已做好如下准备:
硬件准备(必须):
-
地瓜派X5/地瓜派S100 开发板
-
Lerobot 6自由度机械臂(可用开源机械臂)
-
USB摄像头
-
标定板(棋盘格)
-
彩色积木(红、蓝、绿各色等)
软件与环境准备(必须):
-
操作系统:强烈推荐使用Ubuntu(实验示例和指令均基于此系统)。
-
核心软件:需要安装 Conda(管理Python 3.8+环境)、ROS2(机器人操作系统)、VS Code(代码编辑)以及课程专用的 Lerobot库。
-
环境搭建:请严格按照《补充:编译环境搭建.docx》和《ROS环境搭建教程.docx》的步骤进行操作。
知识与技能基础(重要):
-
编程基础:掌握基础的Python语法(用于大部分视觉和AI实验)和C/C++基础语法(用于理解底层驱动和MoveIt2相关代码)。
-
核心概念:理解三维坐标系(X, Y, Z轴)和角度(弧度制) 的概念,这是理解机械臂运动的基础。
-
工具使用:对Linux终端命令有基本了解,能够进行文件操作、运行程序等。
四、 核心学习建议与提醒
-
严格按顺序学习:实验设计环环相扣。例如,不理解运动学(实验2-3)就无法进行轨迹规划(实验4);不掌握手眼标定(实验6-7),就无法实现精准的视觉抓取(实验10)。请勿跳步。
-
动手实践是关键:机器人学是实践的科学。务必亲自动手连接硬件、运行代码、观察现象并尝试修改参数和指令。理论只有通过实践才能内化。
-
善用实验文档:每个实验都有对应的详细操作文档(如《实验01-1-硬件校准与简单控制.docx》),其中包含了实验原理、步骤、代码和常见问题,是您最重要的“实验手册”。遇到问题时,首先回顾文档。
-
理解核心思想:请时刻思考“坐标转换”这一核心思想——它贯穿于从关节角度到末端位置(运动学)、从图像像素到空间坐标(视觉)、从语言指令到动作参数(AI)的整个过程。
-
注意安全:在操作真实机械臂时,注意其运动范围,避免夹伤或碰撞。在仿真环境(实验8)中可大胆尝试。


















 614
614

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









