




续上章节来完成大疆的PSDK中获取无人机实时GPS信息
0 遇到的问题
记得编译的前提是去注册PSDK开发者的
然后将注册的信息,在samples/sample_c/platform/linux/manifold2/application/dji_sdk_app_info.h中修改
话说回来如果你遇到以下问题

这里犯一个致命的错误,就是UART的线接错了,TX对RX,RX对TX,一定要仔细检查噢
最后运行是这样的
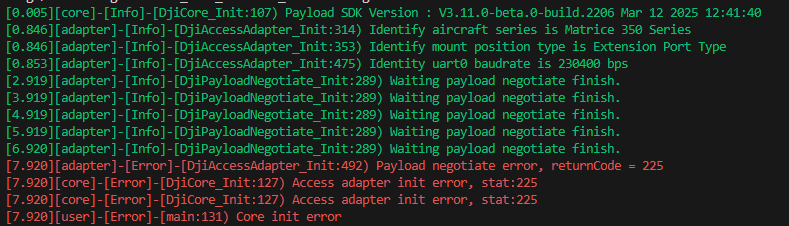
额…这里咋回事呢,报错了,噢~原来忘记了一个问题,我是用串口接收无人机发送的数据的

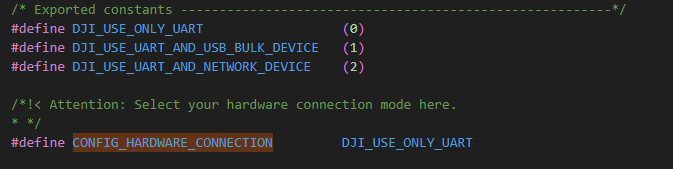
在samples/sample_c/platform/linux/manifold2/application/dji_sdk_config.h中将DJI_USE_UART_AND_NETWORK_DEVICE改成
DJI_USE_ONLY_UART
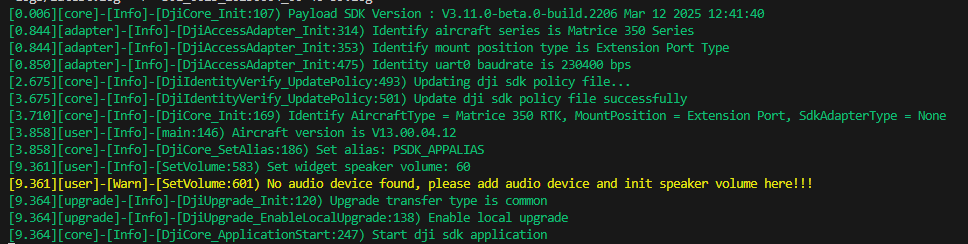
最后运行结果如下
1 PSDK的代码结构
本章节以C++程序为例,讲述如何在main函数中订阅读取GPS信息。
这是PSDK C++部分的结构
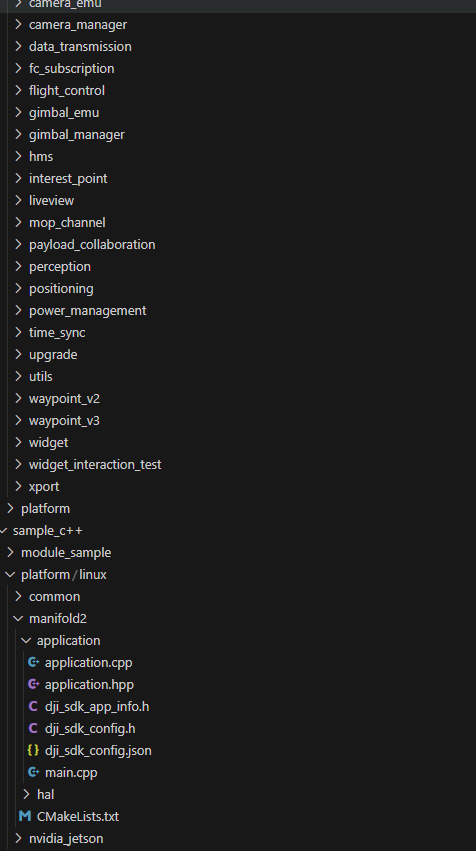
结构分为机载传感器模块代码,和主函数实现的代码,其中传感器模块代码实现了每个传感器数据接收的功能,这包括机载相机管理、飞行控制、云台控制(gimal)、实时视频流(liveview)、视觉图像(perception)等。
2 编写获取GPS信息的代码
通过多次阅读PSDK的C++源码,可以得知,C++源码获取GPS信息的部分代码。
在sample_c/module_sample/fc_subscription/test_fc_subscription.c代码中可以找到我们所需要的GPS信息
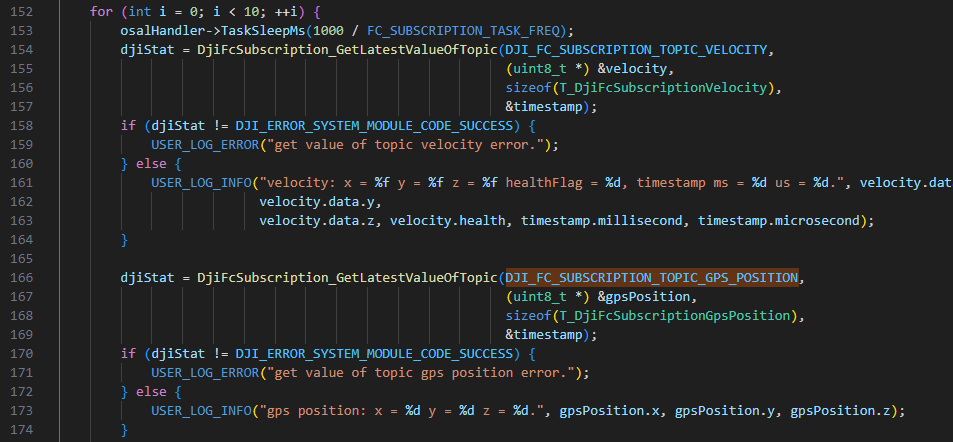
可以看到,GPS具有X,Y,Z三个信息,其中X表示经度(Longitude),Y表示纬度(Latitude),Z代表海拔高度。RTK与GPS的信息类似。PSDK中任何机载传感器的遥测数据都通过FC话题进行发布与订阅,订阅FC话题的函数为DjiFcSubscription_SubscribeTopic,函数的第一个参数决定了遥测数据的类型,是一个宏,所有遥测数据及其对应的宏见参考文档中的遥测数据订阅;第二个参数则用于指定消息获取的频率,也是一个宏,本人在代码中设为了1HZ。通过订阅函数指定订阅话题之后,便可以使DjiFcSubscription_GetLatestValueOfTopic函数来获取话题消息中的信息值,该函数的第一个参数和订阅函数一样,都是遥测数据对应的宏,第二个参数则是GPS结构体T_DjiFcSubscriptionGpsPosition对应的对象的地址;当使用DjiFcSubscription_GetLatestValueOfTopic函数获取到GPS信息之后,便可以在GPS结构体对象gpsPosition中读取其GPS信息,
将main.cpp的代码修改如下
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 889
889



 到【灌水乐园】发言
到【灌水乐园】发言








