




 本文深入探讨了基于采样的路径规划算法RRT*,对比了传统A*算法,介绍了RRT算法的基础及其改进过程,详细解析了RRT*算法如何在优化路径的同时调整图结构,以实现路径的最优搜索。
本文深入探讨了基于采样的路径规划算法RRT*,对比了传统A*算法,介绍了RRT算法的基础及其改进过程,详细解析了RRT*算法如何在优化路径的同时调整图结构,以实现路径的最优搜索。
基于采样的路径规划算法——RRT*
插播:代码已经放到github上面了,实现了A和RRT算法并在ROS下完成了可视化显示。https://github.com/linyicheng1/motionPlan
在上一篇博客中简介了基于搜索的路径规划算法A*的原理,这篇博客则会从另外一个角度去解决路径规划的问题。首先我们要从RRT算法说起,然后再探讨其优势和缺点然后给出一些改进的方法并介绍RRT*的改进之处。
以RRT为代表的路径规划算法基于以下的思路:一个一个的栅格去找非常的费劲,若能找到一些点构成图代表这个地图,在这个图上再去搜索路径则会十分的快速。
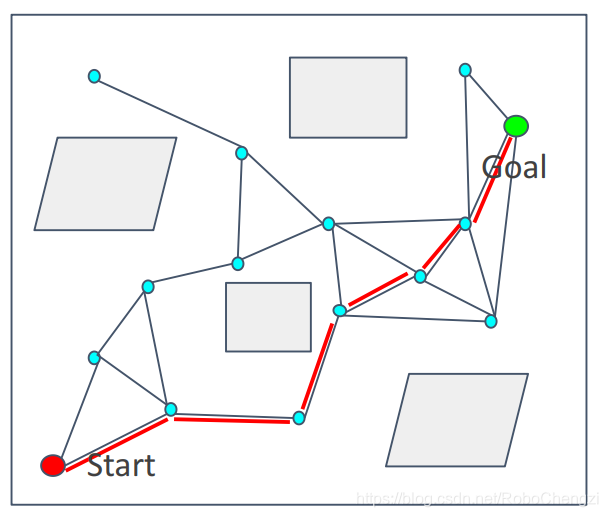
如图所示,可以看到仅仅用很少的几个点构成的图就能代表这个地图信息,从而找到一条路径。可以极大的降低搜索复杂度从而降低运行时间。这种方法最早被提出来称为概率路图 (Probabilistic Road Map ),可以很容易的想到这种搜索路径的方法分为两个部分:
学习阶段
-
随机在地图中生成一些点
-
去掉在障碍物中的点
-
将临近的点连接起来,并把经过障碍物的连线去掉
-
将所有的点和边生成一个图结构
过程可以从这个动图中看出

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2476
2476

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









