




此处承接內积空间
正交分解的几条必要的基础:
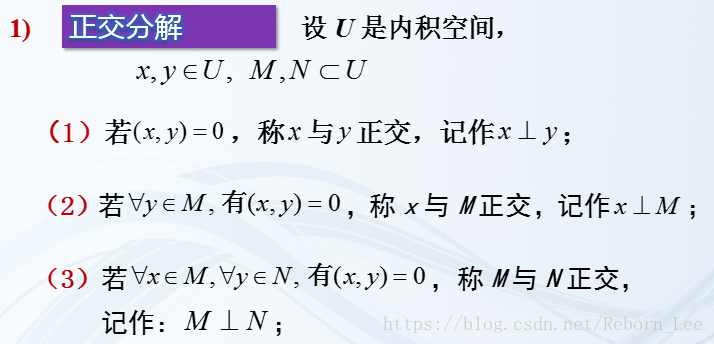
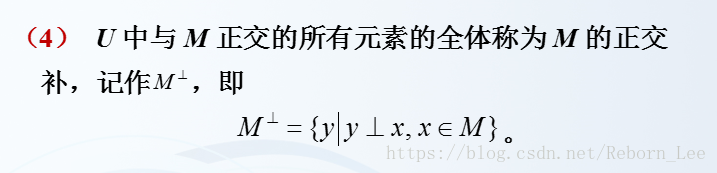
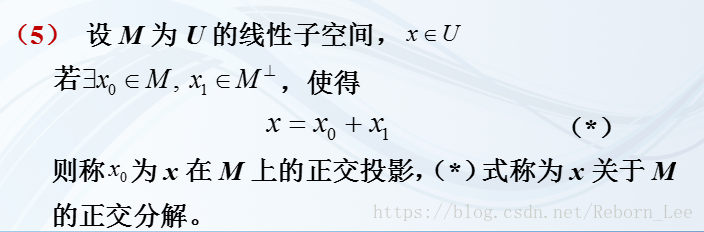
正交分解以及正交投影的定义:
正交分解的性质:

下面一条性质运用到了商高定理来证明:
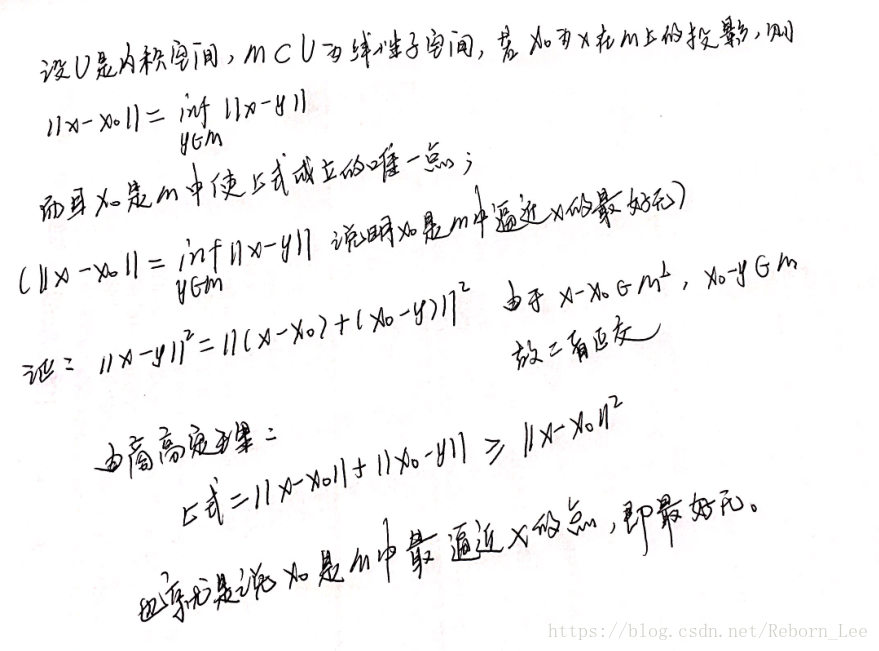
这两条性质比较好理解,其他恶心的性质就不列出来了。
————————————————————————————————————————————————————
希尔伯特空间中的傅里叶分析:
引入:
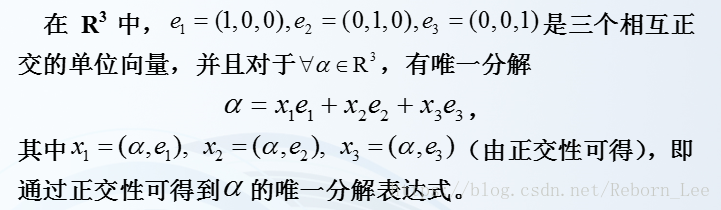
 希尔伯特空间傅里叶分析
希尔伯特空间傅里叶分析
下面一条性质运用到了商高定理来证明:
这两条性质比较好理解,其他恶心的性质就不列出来了。
————————————————————————————————————————————————————

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2411
2411







