




 微软研究团队开发出一种新型低温计算内核与Gooseberry控制芯片,可在极低温度下控制数千个量子比特,解决了量子计算中环境控制难题,推动了大规模量子计算机的发展。
微软研究团队开发出一种新型低温计算内核与Gooseberry控制芯片,可在极低温度下控制数千个量子比特,解决了量子计算中环境控制难题,推动了大规模量子计算机的发展。
量子计算为以前无法解决的问题,提供了解决方案,但是为了兑现这一承诺,必须要保护及维持高度纠缠的量子态。
这其中的挑战在于,需要一个极端的环境才能安置量子设备、保护量子信息。为了操纵这些信息,必须把信息传送至单个量子比特上。而传送信息这一行为又需要一条信息高速公路,以进入这个极端的环境。
以上阐述的两个关键问题,必须在大型量子设备的技术上得以解决。
1.执行经典计算的内核
微软研究人员David Reilly博士,带领一支由微软和悉尼大学的研究人员组成的团队,开发出一种新的方法来解决上述极端环境问题。

图1|David Reilly博士(来源:Everything IoT)
研究团队并没有采用制冷机这种方式来控制量子比特,而是发明了一种被称为“Gooseberry”的控制芯片。该芯片位于量子设备旁边,在极端条件下工作。
他们还开发了一种通用的低温计算内核(cryo-compute core),可以通过浸入液氦的方式,来保证内核的运行温度只比外太空的温度高出一点。
此内核执行经典计算,以确定发送给“Gooseberry”的指令。而“Gooseberry”反过来,将电压脉冲输送给量子比特。此项新颖的经典计算技术,解决了需要控制数千个量子比特的难题。
2.进一步实现量子堆栈
研究团队开发的低温量子控制平台,使用专门的CMOS电路获取数字输入,并生成许多并行的量子比特控制信号,允许进行扩展并支持数千个量子比特,比起之前的技术实现了巨大的飞跃。
驱动平台运行的芯片称为Gooseberry,它能够在100毫开尔文(mK)的低温下运行,也就是标准商用制冷机的额定温度下。而且能耗足够低,从而解决了量子计算机一些输入/输出的难题。
团队研究成果以“A cryogenic CMOS chip for generating control signals for multiple qubits”为题,发表在《自然-电子学》上[2]。他们还将此项研究进行扩展,创造了首个通用的低温计算内核,离量子堆栈(quantum stack)更近了一步。
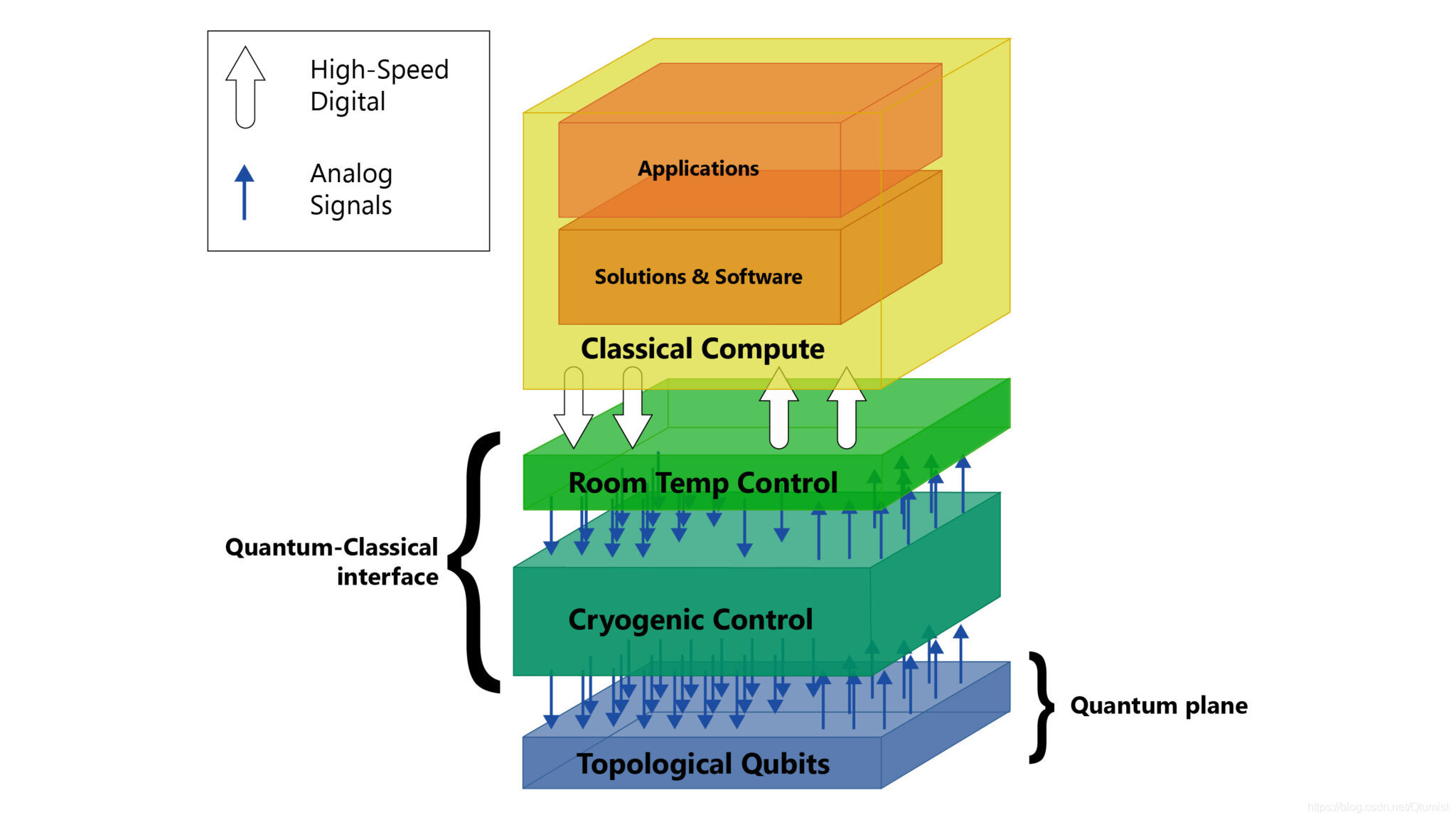
图2|量子堆栈(来源:微软)
3.“神经系统”的关键要素
低温计算内核的工作温度大约为2开尔文,可以通过浸入液氦来达到此温度。尽管看起来还是比较寒冷,但是这已经比Gooseberry芯片所处的环境温度高出20倍。
因此,低温计算内核连同Gooseberry芯片,都是通往大规模量子计算机的关键硬件进程,是多年的工作成果,有助于管理大规模量子计算机不同部分之间以及计算机与用户之间的通信。
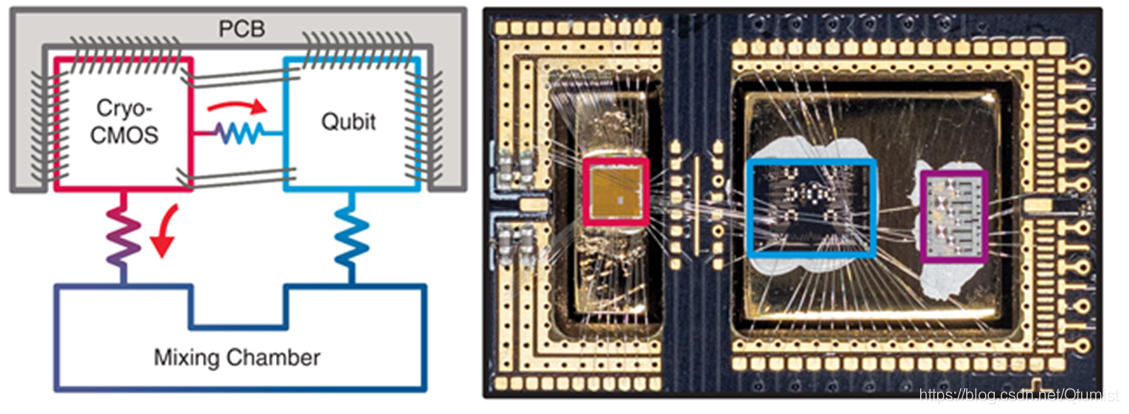
图3|简化版Gooseberry芯片热传导模型(来源:微软)
它们是量子计算机复杂“神经系统”的关键要素,在环境保持在低温状态时,可在每个量子比特之间发送和接收信息。
这对拥有成千上万个量子比特的大规模商业系统来说,是一个重大的挑战。为了实现这一壮举,微软团队克服了重重阻碍。这就意味着,控制数千个量子比特的时代,即将成为新常态。
参考链接:
[1]https://www.microsoft.com/en-us/research/blog/full-stack-ahead-pioneering-quantum-hardware-allows-for-controlling-up-to-thousands-of-qubits-at-cryogenic-temperatures/
[2]https://www.nature.com/articles/s41928-020-00528-y
声明:此文出于传递高质量信息之目的,若来源标注错误或侵权,请作者持权属证明与我们联系,我们将及时更正、删除,所有图片的版权归属所引用组织机构,此处仅引用,原创文章转载需授权。

















 104
104

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









