



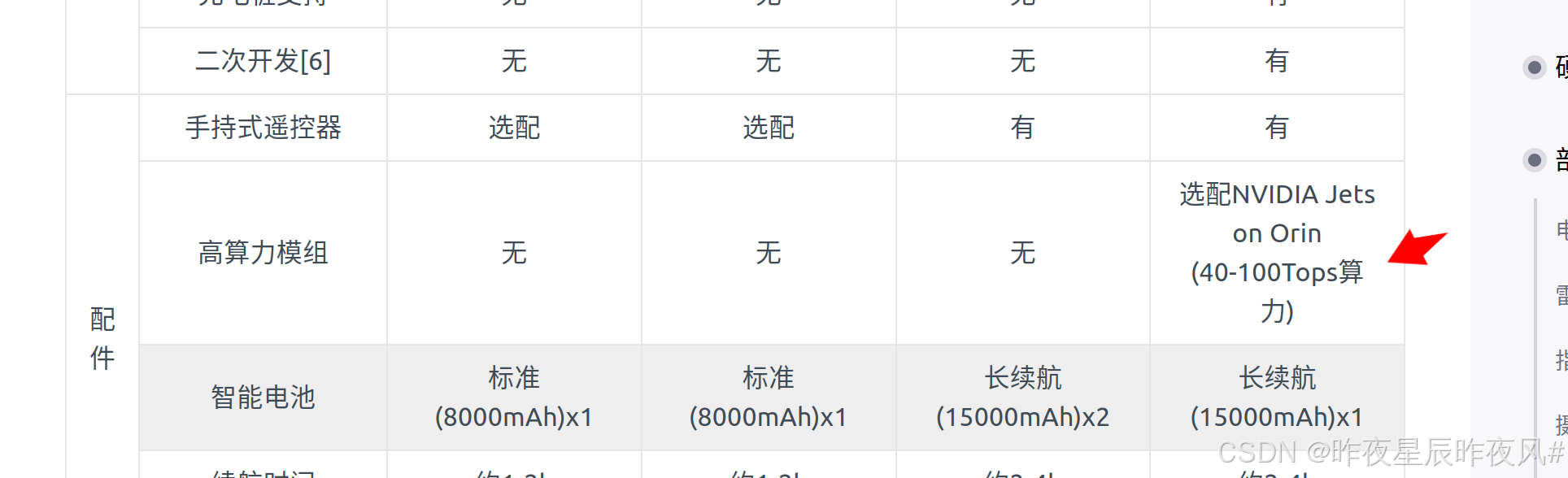
部署折磨我好久没弄好。它是给jetson on orin 部署。起初我还想着和笔记本一样找给ubuntu部署的教程。下图来自宇树文档。可以看到算力挺强大。
这个狗插网线死活没网是什么鬼。补药啊我不是网络工程师不想遇到这种问题o_0。所以我买了亚博智能的usbwifi免驱动网卡。建议直接买这个避免踩坑,我用同学的其它品牌插上也不行。
本文安装主要是按照这篇文章走的。其实就是jeston orin nano 部署。(不对请指正,本人纯小白)
https://blog.youkuaiyun.com/weixin_44312422/article/details/122256752
注意事项
1.配置cuda没有不同。但不需要修改nano板显存
可以输入 free -h 查看 swap 需不需要该。
2.安装archiconda(git下载太慢了,不方便的小伙伴从这里下载)
链接: https://pan.baidu.com/s/15NboulkjPKbCtbT792Wi8A?pwd=1111 提取码: 1111(中间其实还遇到好多奇怪的问题。可惜没有完全养成拍照记录的好习惯0_o)
比如像同时安装了两个版本的python,更新库的时候就会需要自己指定路径。
3.喔对了,很重要的事情。pytorh要安装对应版本
Nvidia Jetson nano 安装Archiconda、gpu版torch、踩坑记录_jetson nano shishenmejiagou-优快云博客
这篇文章里有描述怎么搞,还有对应的torchvision。我记得下载很慢。喝喝茶,让狗狗自己互联网追蝴蝶吧,喝完茶它就追到了。
4.测试yolov5记得去conda环境下

如果遇到缺少很多库,那就一个一个pip install ** 装吧。我是少了几个这样操作的。
在很多大佬的文章指导下终于安装测试成功。

蛮费精力,分享出来也只是希望这篇记录能帮到大家一点,少一点时间搞很多坑的无脑部署,多一点时间研究。关于go2的简单试验纪录就到这里。后续希望还能借到go2继续玩玩。


















 5080
5080

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









