




本次系列介绍Franka科研版机器人FR3在科学研究中的案例。本文为中文翻译,请参考原文,论文解释权和所有权属于原作者。
一个模块化的机器人臂臂控制堆栈
研究方向:Franka-Interface和FrankaPy
智能自主操作实验室
https://labs.ri.cmu.edu/iam/arXiv:2011.02398v1 【cs.2020年11月4日】
摘要我们设计了一个模块化的机器人控制堆栈,为Franka科研机器人提供了一个可定制和可访问的Interface。该框架将高级机器人控制命令抽象为技能,并将其分解为轨迹生成器、反馈控制器和终止处理程序的组合。low level控制在C++中实现,并在1 kHz下运行,高级命令在Python中公开。此外,外部传感器反馈,如估计的物体姿态,可以实时传输到低级控制器。这种模块化的方法允许我们快速原型新的控制方法,这对研究应用是必不可少的。我们已经在超过5篇发表的研究论文中将这个框架应用于各种现实世界的机器人任务。该框架目前已与卡内基梅隆大学的其他机器人实验室在内部共享,我们计划在不久的将来公开发布。
1介绍
为了方便机器人编程,商业协作机器人臂(协同机器人)通常会提供简单的拖动编程接口或示教器。这些接口允许操作员执行远程操作、动觉教学或拖动路径点来编程机器人的行为,并且它们允许机器人以最小的设置时间在制造等领域执行任务。然而,这种机器人Interface往往非常依赖GUI和操作员,这不能很好地符合科学研究开发的要求,因为科研需要Python, C++等高级编程接口和结合外部传感器反馈的能力,这对科学和教育是非常需要的。
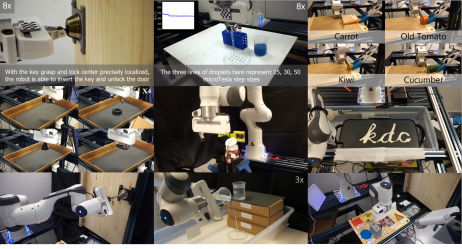
图1。使用Franka-Interface和FrankaPy来整理机器人任务。从左到右从上到下,包括用钥匙打开门,移液,切蔬菜,拿起3d打印的工业部件版
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4123
4123

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









