






 本文深入探讨了三维空间中的几何变换,包括旋转矩阵Eigen::Matrix3d、旋转向量Eigen::AngleAxisd、四元数Eigen::Quaterniond以及平移向量Eigen::Vector3d的使用。同时介绍了如何通过这些数学工具构建和理解4x4变换矩阵Eigen::Isometry3d,为3D建模、计算机图形学和机器人学等领域提供理论基础。
本文深入探讨了三维空间中的几何变换,包括旋转矩阵Eigen::Matrix3d、旋转向量Eigen::AngleAxisd、四元数Eigen::Quaterniond以及平移向量Eigen::Vector3d的使用。同时介绍了如何通过这些数学工具构建和理解4x4变换矩阵Eigen::Isometry3d,为3D建模、计算机图形学和机器人学等领域提供理论基础。
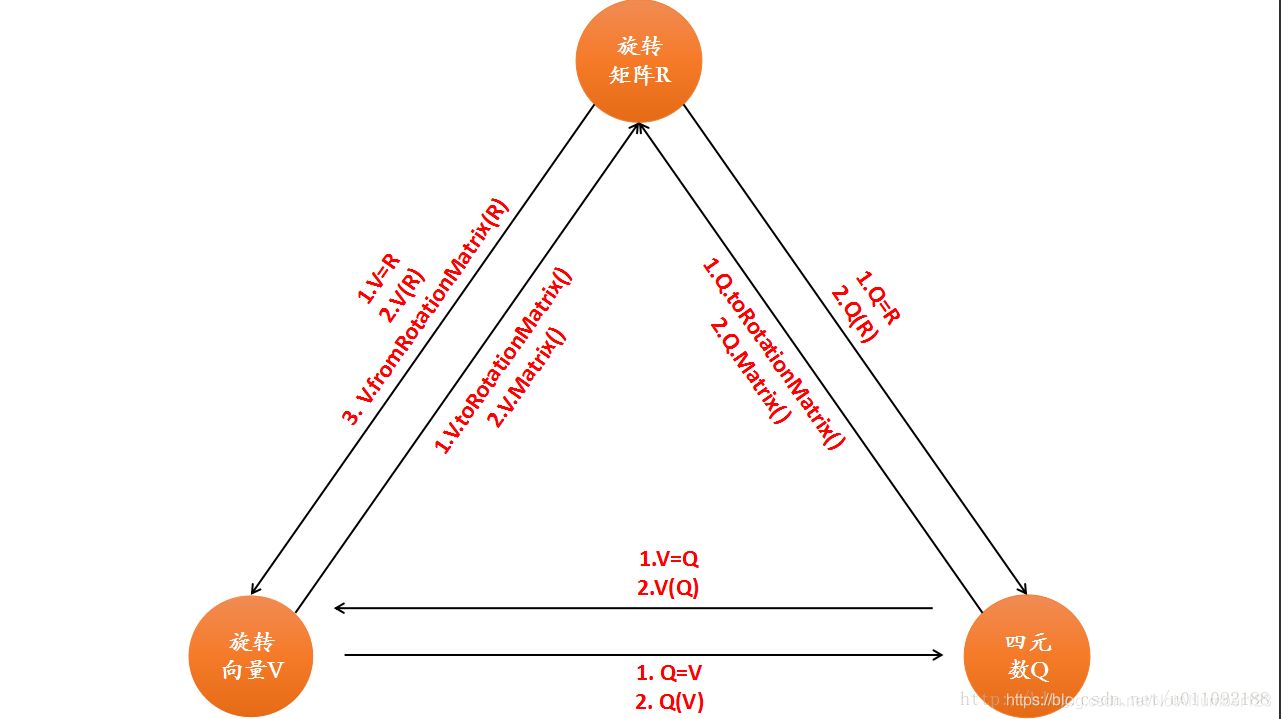
旋转矩阵(3X3):Eigen::Matrix3d
旋转向量(3X1):Eigen::AngleAxisd
四元数(4X1):Eigen::Quaterniond
平移向量(3X1):Eigen::Vector3d
变换矩阵(4X4):Eigen::Isometry3d
原博客

















04-10
 2万+
2万+
2万+
旋转矩阵(3X3):Eigen::Matrix3d
旋转向量(3X1):Eigen::AngleAxisd
四元数(4X1):Eigen::Quaterniond
平移向量(3X1):Eigen::Vector3d
变换矩阵(4X4):Eigen::Isometry3d
原博客
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









