




alamarBlue® 是一种快速、灵敏的细胞增殖和细胞毒性检测试剂,适用于人、动物细胞、细菌和真菌等多种研究对象,可用于贴壁细胞和非贴壁细胞的检测。作为一种无毒、即用型的试剂,alamarBlue®为细胞增殖分析提供了一种简便、快速、安全、经济、可靠的方法。
alamarBlue® 订购信息
|
供应商 |
目录号 |
名称 |
规格 |
使用说明 |
|
AbD Serotec |
BUF012A |
alamarBlue® |
25 ml |
2500 wells /96-well plate |
|
AbD Serotec |
BUF012B |
alamarBlue® |
100 ml |
10000 wells /96-well plate |
如需购买Abd Serotec公司产品,或咨询产品技术问题,请联系代理商欣博盛生物,常备现货,价格实惠
alamarBlue®的特点与优势:
使用简单方便----即用型的单组分试剂,只需加入培养基即可检测细胞的增殖状况;产生的还原产物是水溶性的,与其他常用的细胞增殖检测方法相比,不需要固定、洗涤、提取的步骤。
灵活:可通过分光光度计或荧光光度计检测。
性价比高:可用于高通量分析
安全:对细胞无毒、无害,不影响细胞代谢、细胞因子分泌、抗体合成等,对人体和环境也无毒无害
高灵敏:最低可检测50个细胞
稳定:适用于对细胞增殖状况的连续观察
经济:无需裂解细胞,细胞可继续培养或用于其他实验;
可靠:文献引用率高,Pubmed有上千篇文献的引用
alamarBlue® 的应用
1.监测细胞的生长增殖状态、研究细胞周期、细胞凋亡;
2.监测生长因子活性,评估生长因子对细胞增殖的影响;
3.治疗性药物尤其是肿瘤治疗药物的开发;
4.环境污染物质的评估,细胞毒分析;
5.抗生素效价评估。
alamarBlue® 的工作原理
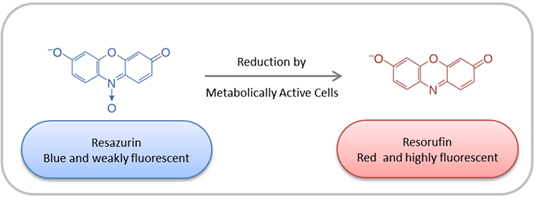
细胞增殖过程中,细胞体内的环境由氧化环境变化成还原环境,呼吸链中的NADPH/NADP, FADH/FAD, FMNH/FMN和NADH/NAD的比值升高。alamarBlue®的活性成分resazurin (刃天青)是一种无毒、可透膜的蓝色染料,有微弱的荧光性,它作为一种氧化还原指示剂,被细胞内吞后,在细胞质中被以上这些代谢中间体还原,其还原产物resorufin呈现出粉红色并有很强的荧光性,最后可用普通分光光度计或荧光光度计进行检测,吸光度和荧光强度与活性细胞数成正比,因而可作为细胞增殖和细胞毒性定量检测的一个理想的指示器。
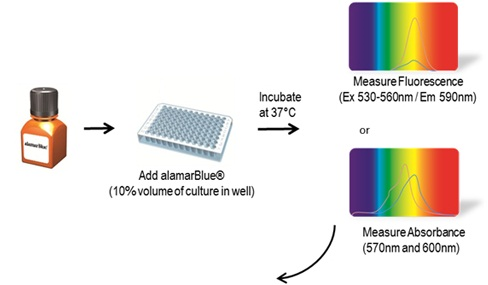
AlamarBlue® 的操作流程以及结果计算
操作非常简单、容易:在培养的细胞中加入alamarBlue® , 于37°C 孵育1-4小时,然后读取荧光值或吸光值(荧光检测为 530-560 nm 激发,发射光波长为590 nm ,或者在 570 nm 和 600 nm用分光光度计测定光吸收值)。
使用alamarBlue® calculator 进行结果计算
AbD Serotec公司专门提供在线的alamarBlue® calculators 软件,通过该软件可直接将原始的吸光值或荧光值转换为定量的结果,并可通过Excel文件格式导出。
AlamarBlue® 的保存
室温下可保存12个月,2-8℃下可延长保质期到20个月。
该产品不得稀释储存。
此产品对光敏感,须避光保存。
注意事项
alamarBlue®使用的pH范围是6.8 - 7.4。

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









