



项目地址:https://github.com/rt-net/jetson_nano_csi_cam_ros
1.安装 GStreamer-1.0
sudo add-apt-repository universe
sudo add-apt-repository multiverse
sudo apt-get update
sudo apt-get install gstreamer1.0-tools gstreamer1.0-alsa
gstreamer1.0-plugins-base gstreamer1.0-plugins-good
gstreamer1.0-plugins-bad gstreamer1.0-plugins-ugly
gstreamer1.0-libav
sudo apt-get install libgstreamer1.0-dev
libgstreamer-plugins-base1.0-dev
libgstreamer-plugins-good1.0-dev
libgstreamer-plugins-bad1.0-dev
2.查看 GStreamer-1.0 版本
gst-inspect-1.0 --version
3.下载包jetson_nano_csi_cam和gscam
cd ~/ccmslam_ws/src
git clone https://github.com/rt-net/jetson_nano_csi_cam_ros.git
git clone https://github.com/ros-drivers/gscam.git
修改gscam的Makefile:
gedit ~/robot_robot/src/gscam/Makefile
第一行后面加上-DGSTREAMER_VERSION_1_x=On变成:
EXTRA_CMAKE_FLAGS = -DUSE_ROSBUILD:BOOL=1 -DGSTREAMER_VERSION_1_x=On
保存退出,返回工作空间编译:
cd ../..
catkin_make
4. 运行roslaunch:
roslaunch jetson_nano_csi_cam jetson_csi_cam.launch
查看ROS话题:
rostopic list
发现出现了/csi_cam_0/image_raw。
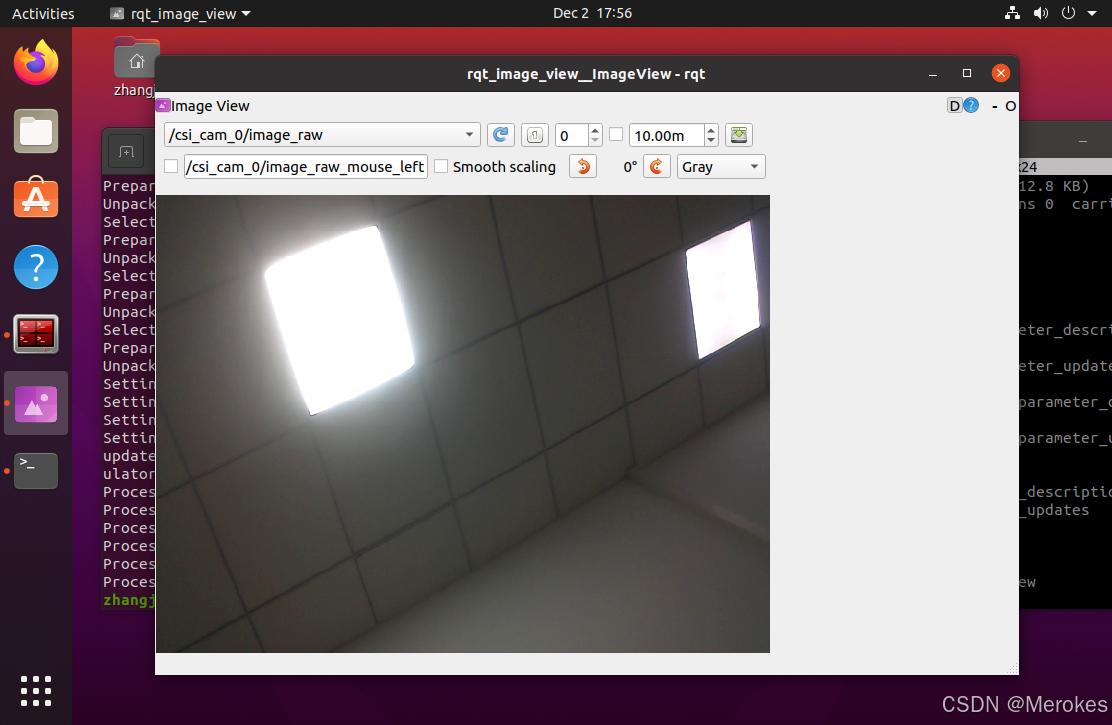
查看捕获的图像:
rqt_image_view
如果能正确显示图像,则成功了。

















 5452
5452



 到【灌水乐园】发言
到【灌水乐园】发言








