



 本文介绍了如何利用粒子群优化算法(PSO)在图像分割中优化阈值选择,通过模拟鸟群觅食行为,不断迭代优化像素位置和速度,以实现更精确的图像分割。PSO方法适用于各种图像类型,但需注意参数调优以避免局部最优。
本文介绍了如何利用粒子群优化算法(PSO)在图像分割中优化阈值选择,通过模拟鸟群觅食行为,不断迭代优化像素位置和速度,以实现更精确的图像分割。PSO方法适用于各种图像类型,但需注意参数调优以避免局部最优。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
🔥 内容介绍
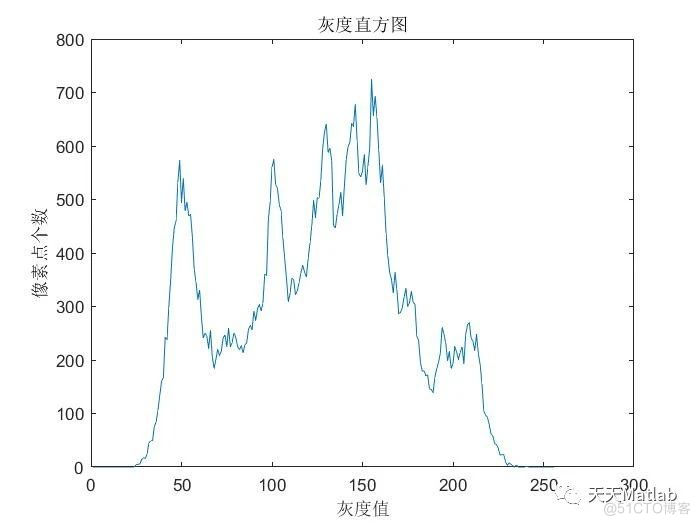
图像分割是计算机视觉领域中的重要任务,它可以将图像划分为具有相似特征的区域,从而提取出图像中的目标对象。然而,由于图像的复杂性和多样性,如何选择合适的阈值进行图像分割一直是一个具有挑战性的问题。本文将介绍一种基于粒子群算法(PSO)优化阈值的图像分割算法流程。
PSO是一种基于群体智能的优化算法,它模拟了鸟群觅食的行为。在PSO中,每个个体被称为粒子,它们通过不断地更新自己的位置和速度来搜索最优解。在图像分割中,我们可以将每个像素看作一个粒子,将像素的灰度值作为粒子的位置,将像素的分类结果作为粒子的速度。通过不断迭代更新粒子的位置和速度,最终可以得到最优的阈值,实现图像的分割。
下面是基于PSO优化阈值实现图像分割的算法流程:
- 初始化粒子群和目标函数
- 随机生成一组粒子,每个粒子的位置表示一个可能的阈值
- 计算每个粒子的适应度,即图像分割的目标函数值
- 更新粒子的速度和位置
- 根据当前位置和速度,计算新的速度和位置
- 速度更新公式:v(t+1) = w * v(t) + c1 * rand() * (pbest - x(t)) + c2 * rand() * (gbest - x(t)) 其中,v(t+1)表示新的速度,w是惯性权重,c1和c2是加速因子,rand()是随机数函数,pbest表示粒子自身的最优位置,gbest表示全局最优位置,x(t)表示当前位置
- 更新粒子的适应度
- 根据新的位置计算每个粒子的适应度
- 如果新的适应度比之前的适应度更好,则更新最优位置
- 判断终止条件
- 如果满足终止条件,则跳转到步骤6
- 否则,继续执行步骤2和步骤3
- 更新全局最优位置
- 在所有粒子的最优位置中选择适应度最好的作为全局最优位置
- 输出结果
- 将全局最优位置对应的阈值作为图像分割的最终结果
通过以上的算法流程,我们可以使用PSO优化阈值实现图像分割。相比传统的图像分割方法,基于PSO的图像分割算法能够更好地适应不同类型的图像,并且具有较好的分割效果。当然,PSO算法也有一些局限性,比如对初始参数的选择较为敏感,容易陷入局部最优等问题。因此,在实际应用中需要根据具体情况进行参数调优和算法改进。
总结起来,基于粒子群算法(PSO)优化阈值的图像分割算法流程是一种有效的图像分割方法。通过不断迭代更新粒子的位置和速度,最终可以得到最优的阈值,实现图像的分割。这种算法具有较好的分割效果,并且能够适应不同类型的图像。希望本文对读者理解和应用基于PSO的图像分割算法有所帮助。
📣 部分代码
function [c10,c11]=cross_2d(s_code10,s_code11)
%交叉算子
pc=0.8; %交叉概率取0.6
population=20;
%(1,2)/(3,4)/(5,6)进行交叉运算,(7,8)/(9,10)复制
ww0=s_code10;
ww1=s_code11;
for i=1:(pc*population/2)
r0=abs(round(rand(1)*10)-3);
r1=abs(round(rand(1)*10)-3);
for j=(r0+1):8
temp0=ww0(2*i-1,j);
ww0(2*i-1,j)=ww0(2*i,j);
ww0(2*i,j)=temp0;
end
for j=(r1+1):8
temp1=ww1(2*i-1,j);
ww1(2*i-1,j)=ww1(2*i,j);
ww1(2*i,j)=temp1;
end
end
c10=ww0;
c11=ww1;
⛳️ 运行结果


🔗 参考文献
[1] 刘桂红,赵亮,孙劲光,et al.一种改进粒子群优化算法的Otsu图像阈值分割方法[J].计算机科学, 2016, 43(3):4.DOI:10.11896/j.issn.1002-137X.2016.3.058.
[2] 徐小慧,张安.基于粒子群优化算法的最佳熵阈值图像分割[J].计算机工程与应用, 2006, 42(10):4.DOI:JournalArticle/5ae3617fc095d70bd81203bd.
[3] 徐小慧,张安.基于粒子群优化算法的最佳熵阈值图像分割[J].计算机工程与应用, 2006.DOI:10.3321/j.issn:1002-8331.2006.10.003.

















 1385
1385

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









