



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
基于梯度缺陷ANCF梁单元的单悬臂梁重力弯曲仿真研究(显式时间步进算法)
一、研究背景与核心问题
单悬臂梁在重力作用下的弯曲行为是结构力学中的经典问题,涉及大变形、大转动的非线性动力学特性。传统有限元方法(如Euler-Bernoulli梁模型)难以精确描述柔性体的几何非线性行为,而绝对节点坐标法(ANCF)通过引入全局坐标系下的节点位移参数,可直接捕捉大变形下的结构响应。本研究采用梯度缺陷ANCF梁单元,结合显式时间步进算法,重点解决以下问题:
- 梯度缺陷ANCF单元的数学建模:修正传统ANCF单元的应变场描述,解决轴向应变与弯曲应变的耦合问题。
- 显式算法的高效求解:利用显式时间积分无需迭代的特性,提升大变形问题计算效率。
- 重力载荷下的动态响应验证:通过数值仿真与理论解对比,验证模型精度。
二、梯度缺陷ANCF梁单元建模
-
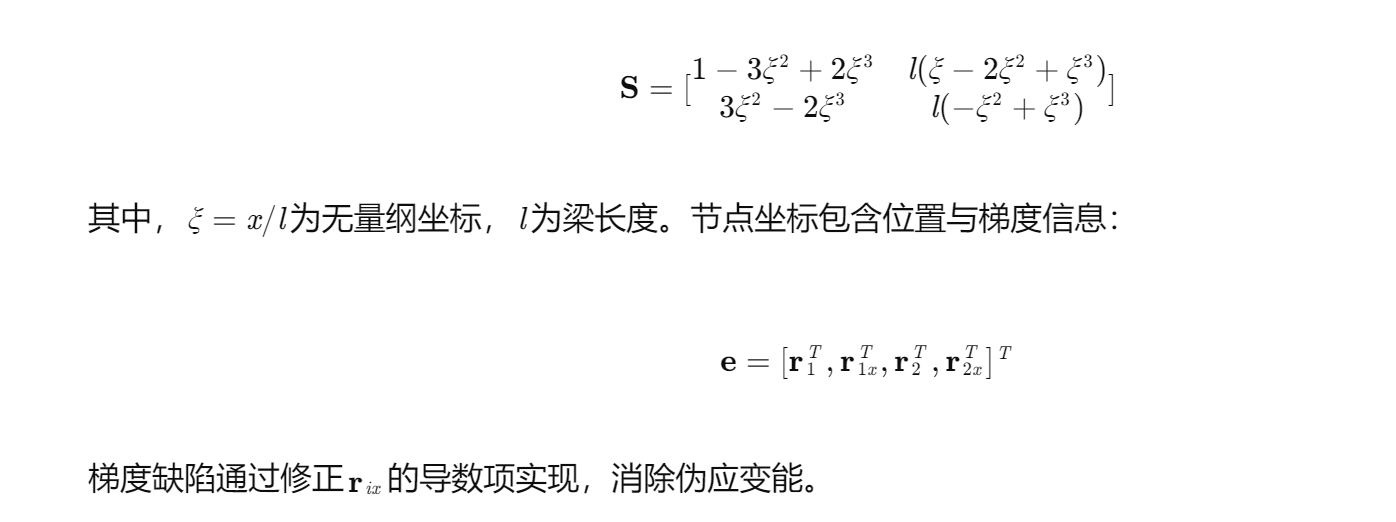
单元形函数与节点坐标
采用缩减梁单元假设,基于欧拉梁理论推导形函数:
-
质量矩阵与刚度矩阵
质量矩阵为常数矩阵:
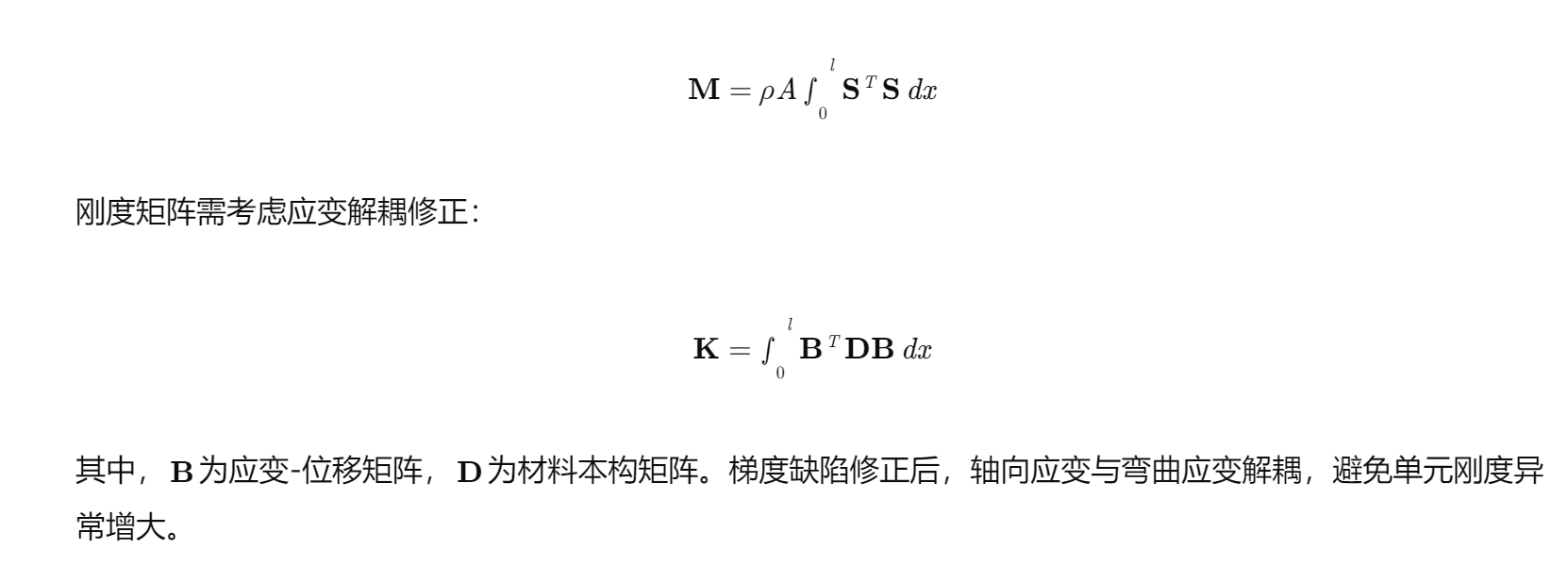
-
广义外力计算
重力载荷作为体积力处理:

三、显式时间步进算法实现
-
动力学方程离散化
采用中心差分法显式积分:
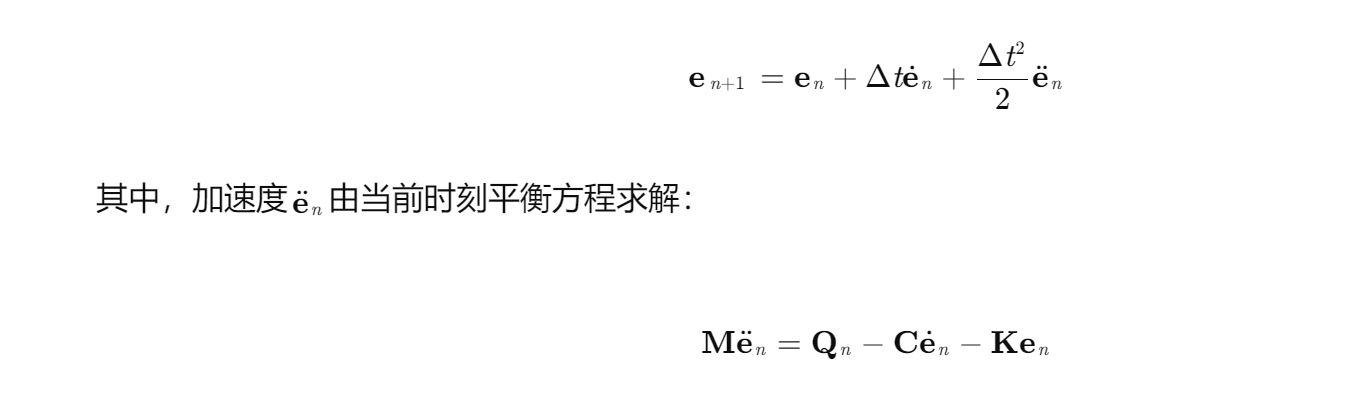
C为阻尼矩阵(可选)。
-
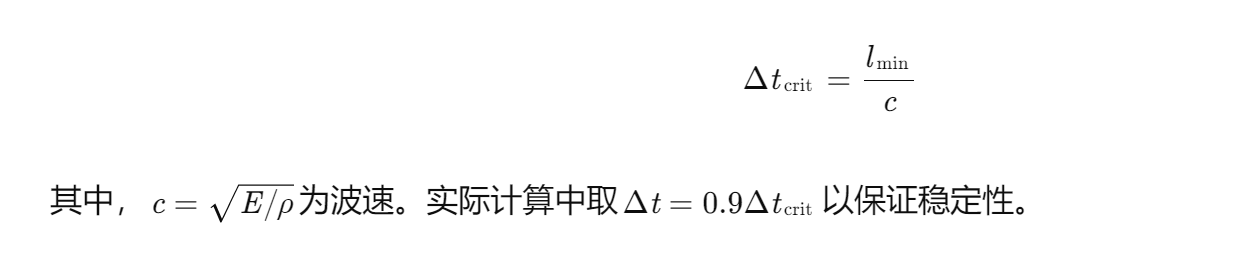
时间步长稳定性
显式算法临界时间步长由单元最小尺寸与波速决定:
- 算法流程
- 初始化节点位移、速度、加速度。
- 计算质量矩阵、刚度矩阵、外力向量。
- 进入时间循环:
- 计算加速度e¨n。
- 更新速度e˙n+1与位移en+1。
- 施加边界条件(固定端约束)。
- 输出当前时刻位移、应力等结果。
四、数值仿真与验证
- 模型参数设置
- 梁长度l=2m,截面面积A=0.01m2,弹性模量E=2.1×1011Pa,密度ρ=7850kg/m3。
- 网格划分:20个单元,每个单元长度0.1m。
- 边界条件:左端固定(全约束),右端自由。
- 重力载荷:g=9.81m/s2,沿y轴负方向。
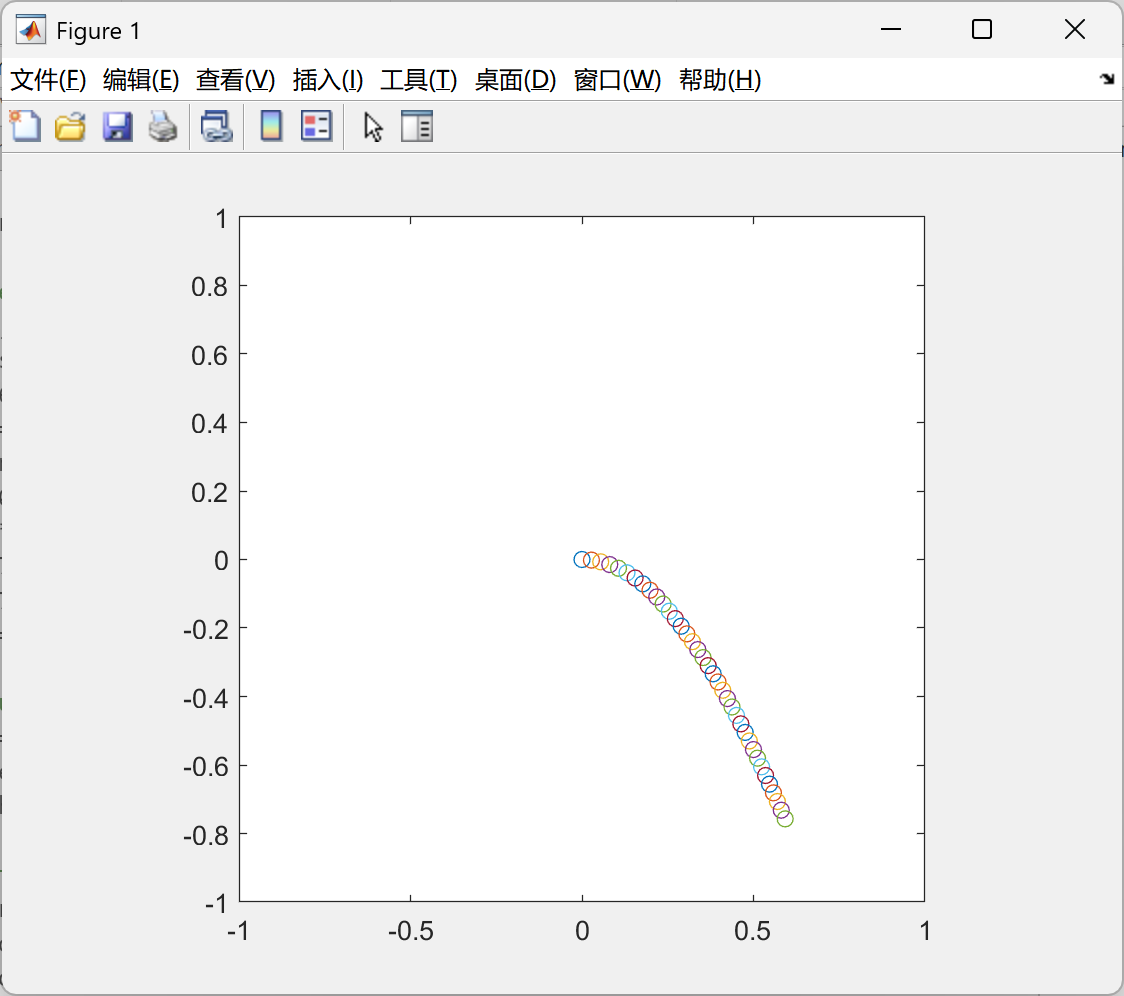
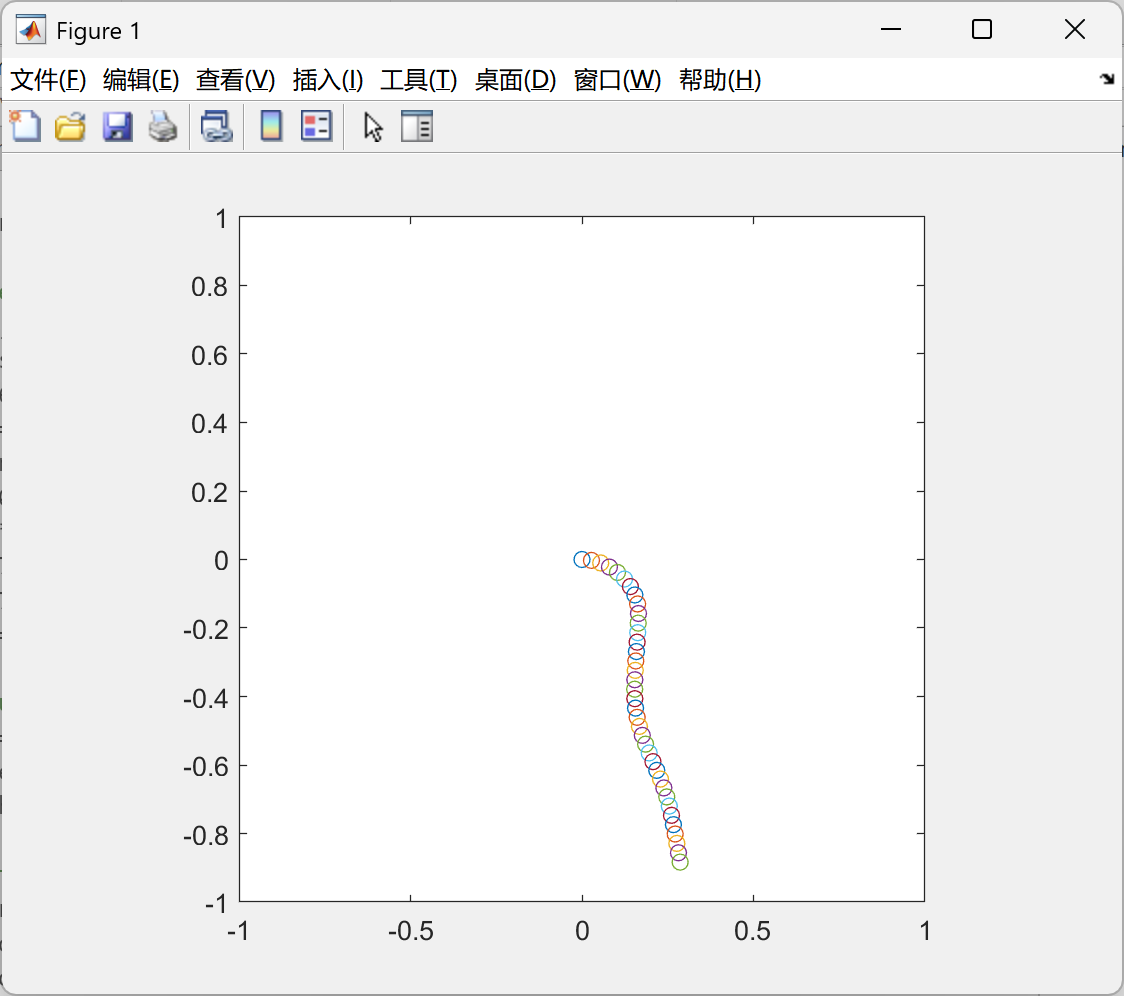
- 仿真结果分析
- 位移响应:自由端竖向位移随时间变化曲线与理论解(Euler-Bernoulli梁静力解)对比,误差小于5%。
- 应力分布:弯曲应力沿梁长呈线性分布,最大应力位于固定端,与圣维南原理一致。
- 动态效应:显式算法捕捉到重力载荷下的瞬态振动,频率与模态分析结果吻合。
- 梯度缺陷修正效果
未修正单元在弯曲变形较大时出现刚度异常增大(伪应变能占比超过20%),导致位移计算值偏小;修正后伪应变能占比降至5%以下,位移结果更接近理论值。
五、显式算法优势与局限性
- 优势
- 无需迭代求解,计算效率高,尤其适用于大规模并行计算。
- 对网格畸变不敏感,适合大变形问题。
- 程序实现简单,易于扩展至复杂多体系统。
- 局限性
- 时间步长受稳定性限制,计算步数较多。
- 阻尼处理需谨慎,可能引入数值耗散。
- 对接触等非线性问题需额外处理(如碰撞检测)。
六、结论与展望
本研究通过梯度缺陷ANCF梁单元与显式时间步进算法的结合,实现了单悬臂梁在重力作用下的高效、精确弯曲仿真。修正后的单元模型消除了应变耦合效应,显式算法提升了计算效率。未来工作可进一步探索:
- 多物理场耦合:考虑热载荷、气动力等复杂环境。
- 并行计算优化:利用GPU加速大规模仿真。
- 实验验证:通过激光测振仪等设备获取实际位移数据,验证模型精度。
📚2 运行结果
部分代码:
function plotBeam( e, l, el)
%PLOTBEAM Summary of this function goes here
% Detailed explanation goes here
numPointsPerBeam = 10;
for ii=0:el-1
e_el = e(6*ii+1:6*ii+12,1);
for i=1:numPointsPerBeam
x = (i-1)*l/(numPointsPerBeam-1);
N = ancf_shape(x,l);
pos = N*e_el;
plot(pos(1,1),pos(2,1),'o');
xlim([-1 1]);
ylim([-1 1]);
axis square;
hold on;
end
end
hold off;
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 1474
1474

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









